

Тема 2. Структурный анализ и синтез механизмов
Структурный анализ – это исследование имеющегося механизма для определения его состава путем расчленения на структурные группы и начальный механизм в порядке, обратном образованию механизма.
Как на любом этапе проектирования, при структурном синтезе различают задачи синтеза и задачи анализа.
Задачей структурного анализа является определения параметров структуры заданного механизма – числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Задачей структурного синтеза является синтез структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т.п.
При выполнении структурного анализа на структурной схеме среди звеньев, наиболее удаленных от входного звена, отыскивается группа Ассура, которую можно отсоединить без нарушения строения оставшихся звеньев механизма. Эту группу изображают отдельно. Среди оставшихся звеньев отыскивают следующую удаленную от входного звена группу Ассура, также изображая ее отдельно. Таким образом, находят все группы Ассура, пока не останется одно входное звено – начальный механизм.
Структурная схема механизма – графическое изображение механизма, выполненное с использованием условных обозначений, рекомендованных ГОСТом или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар (КП), соединяющих эти элементы.
Основные понятия структурного синтеза и анализа. Структурная формула кинематической цепи связывает число степеней свободы (т.е. число независимых движений) с числом и видом кинематических пар в данной кинематической цепи. Основные структурные формулы были составлены для плоских механизмов П.Л. Чебышевым (1879-1962) и М. Грюблером (1851-1935), для пространственных – И.И. Сомовым (1815-1876) и А.П. Малышевым (1879-1962). Так как принципы, заложенные в построение всех этих формул одинаковы, то их можно записать в обобщенном виде:
![]() .
.
где H – число степеней подвижности твердого тела (соответственно при рассмотрении механизма в пространстве H = 6, на плоскости H = 3);
n – число подвижных звеньев в механизме; n = k – 1;
k – общее число звеньев механизма (включая и неподвижное звено – стойку);
i – число подвижностей в КП (от 5 до 1);
pi – число кинематических пар с i подвижностями.
В плоском механизме все звенья движутся в одной плоскости, все оси параллельны друг другу и перпендикулярны плоскости механизма.
Формула Чебышева:
W = 3n – 2pн – pв,
где рн – число низших КП (5-го класса);
р в
– число высших КП (4-го класса).
в
– число высших КП (4-го класса).
В качестве примера вычислим степень подвижности кривошипно-ползунного механизма, изображенного на рис. 3.3.3. Здесь n =3, pн = 4, pв = 0, W = 33 – 22 = 1.
Для расчета избыточных связей, согласно второму определению, используется следующая зависимость:
q = W0 + Wм – W,
где q – число избыточных связей в механизме;
W0 – заданная или требуемая подвижность механизма;
Wм – число местных подвижностей в механизме;
W – расчетная подвижность механизма.
Структурная классификация механизмов по Л.В. Ассуру. Для решения задач синтеза и анализа сложных рычажных механизмов профессором Петербургского университета Л.В. Ассуром (1978-1920) была предложена оригинальная структурная классификация. По этой классификации механизмы, не имеющие избыточных связей и местных подвижностей, состоят из первичных механизмов и структурных групп (рис. 3.3.4).
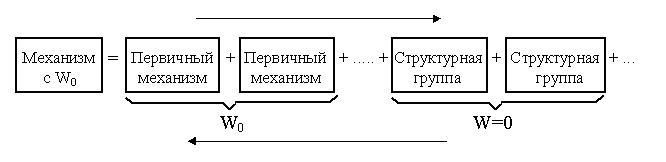
Рис. 3.3.4
П од
первичным механизмом понимают
механизм, состоящий из двух звеньев
(одно из которых неподвижное), образующих
кинематическую пару с одной Wпм
= 1 или несколькими Wпм >
1 подвижностями. Примеры первичных
механизмов даны на рис. 3.3.5.
од
первичным механизмом понимают
механизм, состоящий из двух звеньев
(одно из которых неподвижное), образующих
кинематическую пару с одной Wпм
= 1 или несколькими Wпм >
1 подвижностями. Примеры первичных
механизмов даны на рис. 3.3.5.
Структурной группой Ассура (или группой нулевой подвижности) называется незамкнутая кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой при присоединении ее внешних пар к стойке равна нулю (Wгр = 0).
Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, предназначенного для присоединения группы к звеньям механизма, называются поводками.
Группы могут быть различной степени сложности. Структурные группы Ассура делятся на классы, числа поводков в группе, числа замкнутых контуров внутри группы. В пределах класса (по Ассуру) группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Особенность структурных групп Ассура – их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура, удобно проводить структурный, кинематический и силовой анализы механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 2-го класса 2-го порядка (рис. 3.3.6). Число разновидностей таких групп для плоских механизмов с низшими парами невелико, их всего пять.
1. Группа 1-го вида – все пары вращательные.
2. Группа 2-го вида – на конце одного из звеньев поступательная пара.
3. Группа 3-го вида – в середине поступательная пара.
4. Группа 4-го вида – на конце обоих звеньев поступательные пары.
5. Группа 5-го вида – в середине и на конце одного из звеньев поступательная пара.
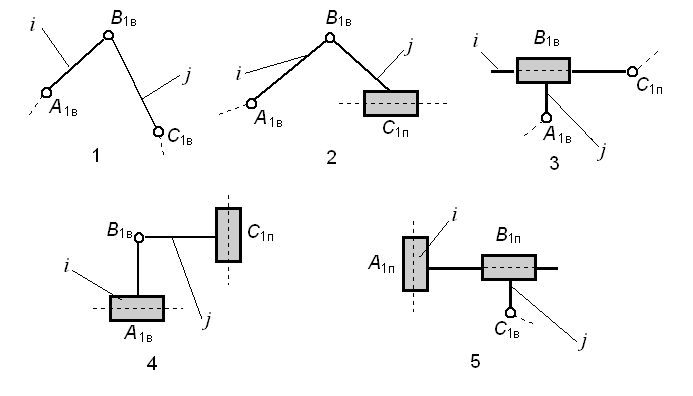
Рис. 3.3.6
Пример. Выполните структурный анализ механизма шарнирного четырехзвенника (четырехшарнирный механизм) (рис. 3.3.7).
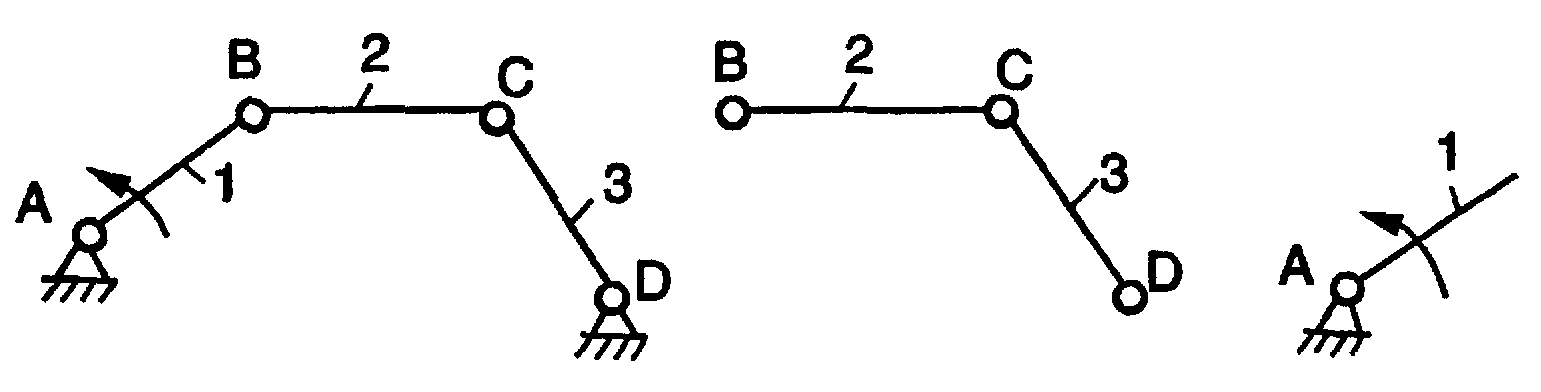
Рис. 3.3.7
1. Определим степень подвижности механизма:
W = 3n – 2pн – pв = 3·3 – 2·4 – 0 = 1.
2. Выделим группы Ассура (последние два звена и три кинематические пары) – группа II класса 1-го вида (II1):
W = 3n –2pн – pв = 3·2 – 2·3 = 0.
3. Остается механизм I класса:
W = 3·1 – 2·1 = 1.
Данный механизм образован присоединением к механизму I класса группы Ассура II класса 1-го вида, т. е. весь механизм является механизмом II класса.
Структура механизма записывается в следующей форме: I II1.
Основные виды плоских рычажных механизмов. Простейшие четырехзвенные плоские механизмы состоят из одного неподвижного звена (стойки) и трех подвижных звеньев (рис. 3.3.8, а – д).
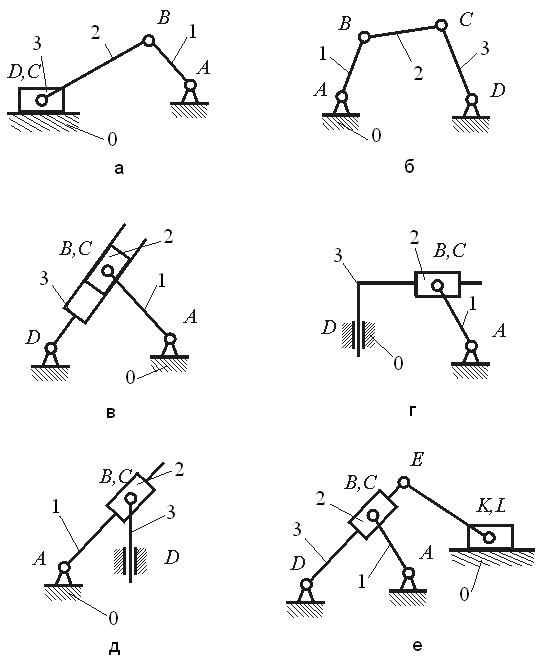
Рис. 3.3.8. Рычажные механизмы:
а – кривошипно-ползунный механизм; б – четырехшарнирный механизм; в – четырехзвенный кулисный механизм; г – синусный механизм; д – тангенсный механизм; е – шестизвенный кулисный механизм: 1 – кривошип, 2 – шатун, 3 – коромысло
Если все пары вращательные, то механизм называется шарнирным четырехзвенником.
Кривошип – звено, которое совершает полный оборот вокруг оси вращения.
Коромысло – звено, которое совершает вращательное движение на неполный оборот.
Шатун – звено, совершающее плоскопараллельное движение.
Если звено 3 соединить со стойкой поступательной парой, то оно будет называться ползуном, а весь механизм – кривошипно-ползунным (рис. 3.3.8, а).
Ползун – звено, которое совершает возвратно-поступательное движение.
В том случае, если поступательная пара находится между звеньями 2 и 3, т. е. звено 2 перемещается по подвижной направляющей, механизм называется кулисным (рис. 3.3.8). Если коромысло служит подвижной направляющей для ползуна, то его называют кулисой, а ползун – кулисным камнем.
Более сложные плоские кулисные механизмы образуются присоединением структурных групп различных видов, которые были рассмотрены выше (рис. 3.3.8, е).