

5.6. Принципи побудови розпізнавальних логістичних систем поштового зв’язку
Загальні відомості про системи розпізнавання образів
Побудова сучасних автоматизованих виробництв, автоматизованих складів, автоматизованих систем обліку і контролю, автоматизованих сортувальних центрів потребує автоматичної ідентифікації тих чи інших образів (товарів, деталей, ПО тощо).
Серед систем розпізнавання образів важливе місце посідають системи розпізнавання графічних зображень. На базі саме таких систем побудовано переважну більшість розпізнавальних систем автоматизованих промислових виробництв.
Нині одними з найбільш поширених систем розпізнавання графічних зображень є розпізнавальні системи поштового зв’язку, призначені для автоматизації складних операцій оброблення ПО, зокрема, їх сортування.
Відповідно до сучасних поглядів розпізнавання образів подається у виді перетворень, наведених на рис. 5.7.
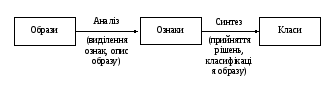
Рисунок 5.7 – Подання розпізнавання образів у виді перетворень
Множина образів Xk (k = 1, 2,…, l) складає деяку сукупність об’єктів, що відносяться до тієї чи іншої області дослідження, наприклад, графічні зображення, звукові сигнали, діагнози хвороб і т.ін.
Зазначені образи піддаються аналізу, в процесі якого виконується їх опис мовою заздалегідь обраної системи ознак. Як ознаки можуть бути фізичні параметри образів (маса, габарити, форма, температура); їх відносні характеристики (великий – малий, високий – низький, товстий – тонкий); характерні ознаки (друкований, рукописний) і т.ін.
Вибір системи ознак – складна і відповідальна задача, в загальному випадку неформалізована. У будь-якому випадку система ознак повинна забезпечувати різні описи множини розпізнаваних образів.
Отримана множина Yi (i = 1, 2,…, m) наборів ознак (описів образів) синтезується (класифікується), тобто відноситься до того чи іншого заздалегідь визначеного основного класу Zj (j = 1, 2,…, n) відповідно до деяких вирішальних правил або визначається, що вона не відноситься до жодного з цих класів, тобто класифікується як додатковий заздалегідь невизначений клас Z0.
Вирішальні правила звичайно забезпечують оптимальність прийняття рішень відповідно до заданих критеріїв оптимальності, наприклад, мінімального ризику, мінімальної помилки тощо.
У реальних системах розпізнавання l m n, тобто, як в результаті аналізу, так і в результаті синтезу відбувається стискання інформації про розпізнаваний образ. Це означає, що практично нічим необмежена множина реальних образів Xk (k = 1, 2,…, l) розбивається множиною їх описів Yi (i = 1, 2,…, m) на m підмножин, що не перетинаються, кожне з яких може розглядатися як деякий узагальнений образ, який подає реальні образи з ознаками, що збігаються. В свою чергу, кожний конкретний клас Zj (j = 1, 2,…, n) включає деяку множину описів образів, які є представниками цього класу, а клас Z0 – множину описів образів, що не є представниками жодного з цих класів.
Розпізнавальні системи поштового зв’язку призначені, головним чином, для розв’язання задач автоматичного сортування ПО, які включають задачі пошуку лицьової сторони ПО, визначення місцеположення адресної інформації на лицьовій стороні ПО, зчитування і розпізнавання зазначеної інформації. Як адресна інформація звичайно виступає цифровий ПІ, який наноситься відправником або оператором поштового зв’язку у спеціально виділеному місці на лицьовій стороні ПО. Внаслідок цього, як образи (об’єкти розпізнавання) виступають графічні зображення (конфігурації) арабських цифр і деякі спеціальні мітки (репери), що наносяться друкарським способом на конверти, картки або адресні ярлики, які наклеюються на посилки, бандеролі чи пачки преси, і дозволяють знаходити лицьову сторону ПО та визначати місцеположення ПІ.
Враховуючи, що параметри цифр ПІ, особливо рукописних, таких як конфігурації й розміри цифр, колір, товщина і контрастність ліній, розриви ліній, завади, відхилення ліній від рекомендованих або середніх значень, деформації, зсуви і повороти цифр, виходи цифр за обмежувальні рамки, зіпсовані, закреслені, виправлені і наведені цифри, відсутність цифр ПІ, сторонні записи у полі ПІ і т.ін. носять імовірний характер, будь-який опис з тією чи іншою ймовірністю може бути представником будь-якого з класів (рис. 5.8).
До сказаного слід додати доступність зображень цифр ПІ до так званих афінних спотворень (поворот, зсув і масштабування зображень у площині, перпендикулярній оптичній осі зчитувального пристрою).
Зазначені обставини призводять до суттєвого ускладнення розпізнавальних систем поштового зв’язку й обумовлюють доцільність їх побудови на базі ЕОМ.
Стосовно АЛСМ розпізнавання графічних зображень є задачею віднесення кожної цифри ПІ до одного з десяти класів арабських цифр або виявлення того, що зазначена цифра не належить жодному із цих класів (відмова від розпізнавання).
Кожне зображення R, що розпізнається, характеризується набором ознак r1, r2, …, rm, які вибираються на основі статистичних досліджень, досвіду, зручності виділення та інших факторів.

Рисунок 5.8 – Ймовірний характер перетворень
у процесі розпізнавання образів
Різні алгоритми розпізнавання цифр використовують як ознаки: штрихи (горизонтальні, вертикальні, нахилені); контури (замкнені, розімкнені); кількість перетинів знака вертикальними, горизонтальними чи нахиленими лініями; топологічні ознаки (початок і кінець ліній, розгалуження і з’єднання ліній, перетинання ліній); метричні ознаки (відстані між елементами знака, розміри окремих елементів).
При розпізнаванні графічної інформації, зокрема, цифр ПІ, використовуються поняття подібності і відмінності образів, що розпізнаються. Набір ознак r1, r2,…, rm, кожна з яких набуває певних дискретних значень, створює деякий m-вимірний векторний простір ознак, кожна координата якого являє одну ознаку, а кожна точка – один образ. Якщо увести певну міру близькості між точками цього m-вимірного векторного простору (наприклад, евклідову чи відстань Хеммінга), то подібність або відмінність образів буде визначатися значеннями цієї відстані.
Образи з малою відмінністю ознак займають малий (компактний) об’єм простору ознак, а з великою – великий об’єм цього простору, не мають чітких меж (розпливчаті). Найбільш компактними є зображення цифр ПІ, нанесені друкарським способом, найбільш розпливчатими – нанесені людиною від руки. На рис. 5.9 наведено приклад ланцюжка переходів образів із одних класів в інші.

Рисунок 5.9 – Приклад переходів образів із одних класів в інші
Задача побудови дієздатної розпізнавальної системи неминуче потребує різкого звуження характеристичних об’ємів рукописних цифр у просторі ознак.
Для спрощення розпізнавальних систем поштового зв’язку уводяться деякі обмеження на місцеположення, розміри і (або) форми написання цифр ПІ. Значного поширення набули системи распізнавання так званих стилізованих і нормалізованих цифр ПІ. У системах розпізнавання стилізованих рукописних цифр уводяться обмеження на місцеположення, розміри і форми написання цифр, у системах розпізнавання нормалізованих рукописних цифр – тільки на місцеположення і розміри цифр.
Показники якості розпізнавання графічних зображень
Основними показниками якості розпізнавання графічних зображень є:
ймовірність vпр правильного розпізнавання;
ймовірність vвідм відмови від розпізнавання;
ймовірність vпом помилкового розпізнавання.
Сума vпр + vвідм + vпом = 1 як сума ймовірностей повної групи подій.
Звідси випливає, що збільшення ймовірності vпр можливе лише за умов зменшення однієї з імовірностей vвідм, vпом, або за умов зменшення обох цих імовірностей.
Реально vпр vвідм vпом.
Якщо вважати, що на вхід розпізнавальної системи надходять графічні зображення, які подають основні класи Zi (i = 1, 2,…, n) або додатковий клас Z0, а на її виході формуються результати розпізнавання, які також можуть подавати основні класи Zj (j = 1, 2,…, n) або додатковий клас Z0, то складові ймовірностей vпр, vвідм, vпом можуть бути визначені з діаграми переходів, наведеної на рис. 5.10.

Рисунок 5.10 – Визначення складових імовірностей vпр, vвідм, vпом
Як випливає з рис. 5.10, імовірності vпр, vвідм, vпом визначаються п’ятьма ймовірностями переходів:
v1 = vij (i, j = 1, 2,…, n; i = j) – імовірність правильного розпізнавання основних класів;
v2 = v00 – імовірність відмови від розпізнавання додаткового класу, яку також можна розглядати як ймовірність правильного розпізнавання додаткового класу;
v3 = vi0 (i = 1, 2,…, n) – імовірність відмови від розпізнавання основних класів;
v4 = v0j (j = 1, 2,…, n) – імовірність помилкового розпізнавання додаткового класу як основного;
v5 = vij (i, j = 1, 2,…, n; i ≠ j) – імовірність помилкового розпізнавання основних класів.
Ймовірності vпр, vвідм, vпом визначаються через імовірності v1, v2, v3, v4, v5 як vпр = v1, vвідм = v2 + v3, vпом = v4 + v5.
В процесі розпізнавання образів неодноразово приймаються різноманітні рішення:
про значення чергового елемента графічного зображення;
про наявність чи відсутність тієї чи іншої ознаки;
про розпізнавання тієї чи іншої цифри ПІ;
про розпізнавання усіх цифр ПІ.
Крім того, процесу розпізнавання передують прийняття рішень:
про знаходження лицьової поверхні ПО;
про попереднє оброблення графічного зображення;
про знаходження усіх спеціальних міток;
про ідентифікацію кодів усіх міток;
про наявність чи відсутність проективних спотворень графічного зображення;
про визначення параметрів афінних спотворень графічного зображення;
про визначення напрямів обходу графічного зображення і т.ін.
Слід підкреслити, що з прийняттям кожного рішення кількість інформації про графічне зображення зменшується, а ймовірність його помилкового розпізнавання зростає.
Застосування критерію мінімального ризику при розпізнаванні
графічних зображень рукописних цифр
Ймовірний характер описів рукописних цифр обумовлює прагнення застосувати критерій мінімального ризику Байєса при їх класифікації.
На рис. 5.11 наведено матрицю розподілу ймовірностей vij належності опису Yi (i = 1, 2,…, m) класу Zj (j = 0, 1,..., n).
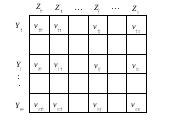
Рисунок 5.11 – Матриця розподілу ймовірностей vij
належності опису Yi (i = 1, 2,…, m) класу Zj (j = 0, 1,..., n)
Класи Zj (j = 1, 2,..., n) – основні, клас Z0 – додатковий.
Сума елементів рядка Yi (i = 1, 2,…, m) матриці
![]()
являє собою ймовірність опису, що відповідає цьому рядку.
Сума елементів стовпця Zj (j = 0, 1,..., n) матриці
![]()
являє собою ймовірність класу, що відповідає цьому стовпцю.
Сума усіх елементів матриці
![]()
як сума ймовірностей повної групи подій.
Збитки, обумовлені класифікацією, можуть бути надані у виді платіжних матриць cij, наведених на рис. 5.12.

Рисунок 5.12 – Платіжні матриці
Матриця рис. 5.12, а відповідає загальному випадку (індивідуальні значення збитків), а матриця рис. 5.11, б – окремому випадку (рівність значень однотипних збитків).
Із порівняння
матриць
![]() і
і
![]() випливає, що збитки,
обумовлені класифікацією опису
Yi
(i = 1, 2,
..., m) як
класу Zj
(j = 0,
1,...,
n), складають
випливає, що збитки,
обумовлені класифікацією опису
Yi
(i = 1, 2,
..., m) як
класу Zj
(j = 0,
1,...,
n), складають
![]() ,
,
у зв’язку з чим цільова функція класифікації опису Yi (i = 1, 2,..., m) набуває виду
![]() ,
,
звідки випливає умова доцільності класифікації опису Yi (i = 1, 2,..., m) як основного класу Zi (i = 1, 2,..., n)
![]() ,
,
або умова класифікації зазначеного опису як додаткового класу Z0 (відмова від розпізнавання)
![]() .
.
При розпізнаванні рукописних цифр однотипні збитки приймаються рівними, в зв’язку з чим матриця збитків перетворюється на п’ятикомпонентну, в якій:
c1 – збитки, пов’язані з правильним розпізнаванням основних класів;
c2 – збитки, пов’язані з відмовою від розпізнавання додаткового класу або, що те саме, з правильним розпізнаванням додаткового класу;
c3 – збитки, пов’язані з відмовою від розпізнавання основних класів;
c4 – збитки, пов’язані з помилковим розпізнаванням додаткового класу як основного;
c5 – збитки, пов’язані з помилковим розпізнаванням основних класів.
Як основні класи виступають конфігурації десяти арабських цифр, як додатковий клас – конфігурації, що не належать до арабських цифр.
За умов сортування c1 c2 c3 c4 c5.
Для п’ятикомпонентної матриці збитків умова доцільності класифікації опису Yi (i = 1, 2,..., m) як основного класу Zj (j = 1, 2,..., n) може бути приведена до виду
![]() ,
,
а умова доцільності класифікації зазначеного опису як додаткового класу Z0 (відмова від розпізнавання) – до виду
![]() ,
,
де

 – нормовані ймовірностіvij,
vi0,
– нормовані ймовірностіvij,
vi0,
![]()
![]() –коефіцієнти збитків.
–коефіцієнти збитків.
При виконанні
першої нерівності опис Yi
(i = 1,
2,..., m)
класифікується як основний клас Zj
(j = 1,
2,..., n),
якому відповідає
![]() ,
при виконанні другої – класифікується
як додатковий класZ0
(відмова від
розпізнавання).
,
при виконанні другої – класифікується
як додатковий класZ0
(відмова від
розпізнавання).
З наведених виразів видно, що
–1 а 1, 0 b 1, b – 1 а b,
внаслідок чого область допустимих значень а і b має вид паралелограма з координатами кутових точок (1; 1), (0; 1), (-1; 0), (0; 0), наведеного на рис. 5.13.

Рисунок 5.13 – Область допустимих значень а і b
Якщо
у рівнянні
![]() розглядати а
і
b як
змінні, а
розглядати а
і
b як
змінні, а
![]() і
і
![]() – як постійні, то в області допустимих
значеньа
і
b можна
побудувати пряму, яка є
графіком
цього рівняння, і
розділяє зазначену область на дві
частини.
– як постійні, то в області допустимих
значеньа
і
b можна
побудувати пряму, яка є
графіком
цього рівняння, і
розділяє зазначену область на дві
частини.
Частина області, розташована нижче прямої (вертикальна штриховка), відповідає прийняттю рішень про класифікацію конфігурацій, що розпізнаються, як основних класів, а частина, розташована вище неї (горизонтальна штриховка), – прийняттю рішень про їх класифікацію як додаткового класу (відмова від розпізнавання).
На рис. 5.13 зазначена пряма побудована для значень
![]() = 0,6;
= 0,6;
![]() = 0,2.
= 0,2.
Точка Т1 з координатами а = - 0,3; b = 0,4 розташована під прямою, отже конфігурація, що розпізнається, класифікується як основний клас. В цій точці умова доцільності класифікації як основного класу виконується, а умова доцільності класифікації як додаткового класу не виконується:
0,6 - 0,3∙0,2 = 0,54 0,4.
Точка Т2 з координатами а = 0,2; b = 0,8 розташована над прямою, отже конфігурація, що розпізнається, класифікується як додатковий клас. У цій точці умова доцільності класифікації як основного класу не виконується, а умова доцільності класифікації як додаткового класу виконується:
0,6 + 0,2∙0,2 = 0,64 0,8.
Таким чином, результати класифікації суттєво залежать від значень елементів матриці збитків.
Фактичні значення збитків, обумовлених прийняттям рішень, складають:
при класифікації опису Yi (i = 1, 2,..., m) як основного класу, якому відповідає
 ,
,
![]() ;
;
при класифікації опису Yi (i = 1, 2,..., m) як додаткового класу
![]() .
.
Значення збитків у кутових точках паралелограма становлять:
у точці (1; 1): c1 = c2 = c3 = c4 < c5, збитки мінімальні;
у точці (0; 1): c1 = c2 = c3 < c4 = c5, збитки зростають;
у точці (-1; 0): c1 = c2 < c3 = c4 = c5, збитки зростають;
у точці (0; 0): c1 < c2 = c3 = c4 = c5, збитки максимальні.