


102 |
3 Connections and Metrics |
Fig. 3.9 Elie Cartan (1869–1951). A true giant of XXth century mathematical thought. He completed the theory of Lie Algebras, invented exterior differential calculus, invented the theory of symmetric spaces, introduced the notion of mobile frames, reformulated the theory of General Relativity, discovered spinors much earlier than physicists. He gave fundamental results in the theory of differential equations and essentially invented the concept of fibre-bundles
3.2.5 Mobiles Frames from Frenet and Serret to Cartan
As everyone knows Einstein’s paper on Special Relativity is dated 1905, while that on General Relativity was published at the end of 1915. Einstein’s theory of gravitation, which is the main theme of the present book, was formulated in the language of differential geometry as developed by Ricci and Levi Civita and centered around the notion of metric, firstly introduced by Gauss for two-dimensional surfaces and then extended to all dimensions by Riemann.
Yet as early as 1901, a relatively young scholar, who was to be a giant of XXth century mathematical thought, had already introduced a different approach [10] to differential geometry, whose greater depth and power started to be appreciated only later on.
The genius we are referring to is Elie Cartan (see Fig. 3.9) and the above mentioned 1901 paper actually deals with the theory of first order partial differential equations. Just as Sophus Lie, dealing with the same classical problem of analysis, developed the notion of Lie groups, in the same way Cartan, who had already given unparalleled contributions to the completion of Lie’s theory, reconsidering differential systems from a new view-point, introduced the notion of exterior differential forms and laid the basis of modern differential geometry, as we presented it in Chap. 2. In a subsequent paper of 1904 [19], Cartan introduced a particular set of 1-forms that, in modern scientific literature, bear his name together with that of the German mathematician Ludwig Maurer.6 Maurer-Cartan one-forms are as-
6Ludwig Maurer (1859–1927) obtained his Doctorate in 1887 from the University of Strasbourg (at the time under German rule after the defeat of France in the 1870 war) and became professor of Mathematics at the University of Tübingen. His doctoral dissertation Zur Theorie der linearen Substitutionen [20] happens to contain a germ of the idea of Maurer-Cartan forms developed by Cartan in 1904.

3.2 A Historical Outline |
103 |
sociated with Lie groups and, as the reader will appreciate in the sequel of the present chapter, play an essential role in the general theory of connections on fibrebundles, namely in establishing the notion of gauge-fields, presently identified with the mediators of all fundamental forces of Nature. Cartan’s 1904 paper, that preceded both Special and General Relativity, is fundamental not only for the actual result it contained about covariantly closed one-forms on Lie group manifolds, but also for the general view-point on geometry that such structures advocated. Using Cartan’s phrasing, this view-point is that of repères mobiles, mobile frames in English. As all great and simples ideas, that of mobile frames developed slowly, through the contribution of more than one mind and, in this case, all the minds were French.
Jean Frédéric Frenet was born in Périgueux in 1816 and died in the same city in 1900. He entered the École Normale Supérieure in 1840 but then he quitted it and studied at the University of Toulouse. Frenet’s doctoral thesis, submitted in 1847 had the intriguing title Sur le fonctiones qui servent à determiner l’attraction des sphéroides quelconques. Programme d’une thèse sur quelque propriétés des courbes a double courbure.7 This thesis presented the idea of attaching a frame to each point of an arbitrary curve that develops in three-dimensional space. As this frame moves along the curve, we can look at its rate of change to determine how the curve turns and twists, two evolutions which completely determine the geometry of the considered curve.
At the time of his writing, matrix notation and matrix calculus were not yet in general use and Frenet wrote six formulae which just correspond to six entries of a 3 × 3 matrix. The latter has obviously nine entries and it was Serret’s historical mission to write all of them independently from Frenet.
Joseph Alfred Serret was three year younger than Frenet. Born in Paris in 1819 he died in Versailles in 1885. While Frenet had been a missed issue of École Normale Superiéure, Serret was an achieved product of École Polytechnique, from which he graduated in 1848. Appointed professor of Celestial Mechanics at the Collège de France in 1861, Serret was later offered the chair of differential and integral calculus at the Sorbonne. Frenet instead, after his start in Toulouse, was appointed professor of mathematics at the University of Lyon, where he was also director of the astronomical observatory.
Frenet-Serret formulae, as history decided they should be named, were published (nine and six) in two independent papers with a very similar title, at one year distance one from the other. Serret’s paper [12] appeared in 1851 and was named Sur quelques formules relatives à la théorie des courbes à double courbure. Frenet published in 1852 the results of his 1847 doctoral thesis under the title: Sur quelques propriétés des courbes à double courbure [11].
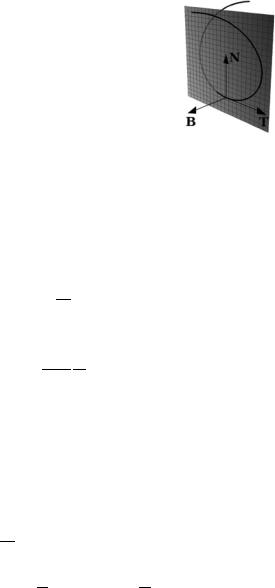
Consider Fig. 3.10. Given a curve C (s) in three-dimensional Euclidian space, we can easily fix the following rule which uniquely defines a basis of three orthonormal
7About the functions which help determining the attraction of general spheroids. Programme for a thesis about some properties of curves with a double curvature.
104 |
3 Connections and Metrics |
Fig. 3.10 The moving frames of Frenet and Serret
vectors attached to each point of the curve. Let r be the standard Cartesian coordinates of R3. Any curve can be described by giving r = r(s) where s is the length parameter:
s |
= |
s % dr % ds |
(3.2.18) |
|||
|
|
% |
|
% |
|
|
|
0 |
% |
ds |
% |
|
|
|
|
|
% |
|
% |
|
By definition the tangent vector to the curve is:
d |
|
T(s) = ds r(s) |
(3.2.19) |
and we can define the normal vector by means of the normalized second derivative:
N(s) = |
1 d |
|
|t(s)| ds t(s) |
(3.2.20) |
Finally we can complete the orthonormal system by means of the exterior product of N(s) and T(s) which is historically named the binormal vector:
B(s) = T(s) N(s) Bi (s) = εij k T j (s)N k (s) |
(3.2.21) |
Since E(s) = {T(s), B(s), N(s)} provides a basis for three-vectors, it is clear that also the derivative of this basis can be reexpressed in terms of itself, namely we can write:
d |
|
ds E(s) = Ω(s)E(s) |
(3.2.22) |
where Ω(s) is a 3 × 3 matrix which is necessarily antisymmetric since ET E = 1.
Indeed from such a relation it follows dsd EET = Ω = −E dsd ET = −ΩT .
In the component language of the middle XIXth century, Frenet and Serret proved that this matrix is not only antisymmetric but it has also a special normal form, in terms of two-parameters that they identified with the curvature κ and the torsion τ of the curve:
|
0 |
κ(s) |
0 |
|
(3.2.23) |
Ω(s) = − |
0 |
τ (s) |
0 |
|
|
|
κ(s) |
0 |
τ (s) |
|
|
−

3.2 A Historical Outline |
105 |
The reason of these names becomes obvious looking at Fig. 3.10. The span of the vectors T, N defines the osculating plane to the curve. If the torsion parameter τ vanishes the curve lies at all times in such a plane and the tangent and normal vectors undergo, from one point to the next one, an infinitesimal rotation of an angle δθ = κ. When the torsion τ is different from zero, the tangent and normal vectors undergo not only an infinitesimal rotation but also a displacement in the direction of the third vector B and this displacement is precisely proportional to τ . The geometry of the curve is fully determined by the knowledge of the parameters κ and τ . For instance all planar curves are characterized by τ = 0 and among them the circles are those with constant curvature κ. Similarly when both κ and τ are non-vanishing but constant we have a spiral and so on.
In these very elementary geometrical facts the astonishing mathematical insight of Elie Cartan perceived a far reaching perspective of incredible richness. Refining the idea of the moving frames he started a conceptual revolution of the same amplitude as that done by Gauss with the Disquisitiones of 1828.
The origins of Cartan were very humble just as those of the King of Mathematicians and those of Riemann. The environment where Cartan was born was even poorer and deprived of any cultural background, since his father was a plain blacksmith in the mountain village of Dolomieu in Haute Savoie. Gauss could study thanks to the generosity of the Duke of Brunswick, Cartan obtained the very best scientific education available at the time thanks to state stipends that the French Republic had introduced for talented people, independently from their social or economical status. Discovered in his remote village by the school inspector Dubost, Elie was state-supported in order to attend Lycée in Lyon and then entered the École Normale Superiéure of Paris where he had such masters as Picard, Darboux and Hermite. Cartan’s doctoral dissertation was presented in 1894 and was already a masterpiece [18]. Some years before, in 1888–1890, the German mathematician Wilhelm Karl Joseph Killing (1847–1923), who is also responsible for the key notion of Killing vector fields,8 had classified the complex finite dimensional simple Lie algebras, inventing the notions of what were later named Cartan subalgebras, root systems and Cartan matrices. So doing he had discovered the possible existence of the exceptional Lie algebras G2, F4, E6, E7 and E8. Killing, who was very creative but hardly rigorous, had no proof of the actual existence of these algebras and could not produce their explicit realizations. Cartan could. His thesis [18] was a rigorous remake of Killing’s papers [13–16] where he also gave the explicit matrix construction of all exceptional Lie algebras, already announced in a paper published by him one year before in German [17].
After such a brilliant start the scientific production of Elie Cartan was an endless piling up of fundamental results. He brought the theory of Lie algebras and Lie groups to perfection by classifying all their representations and, so doing, in a paper of 1913, he discovered spinors, much earlier than physicists found them necessary to describe the intrinsic angular momentum of fermions. He combined Lie
8We shall discuss this notion at length in Volume 2 in the chapters dealing with symmetries of black-holes and cosmological solutions.
106 |
3 Connections and Metrics |
theory with differential geometry, founding, developing and completing the theory of symmetric spaces. Extending his very early work on differential forms, he created the exterior differential calculus, which eventually proved much more powerful and synthetic than the tensor calculus of Ricci and Levi Civita. Right after the creation of General Relativity by Einstein, he started rethinking it in terms of mobile frames and came to the reformulation of gravitational equations which goes under the name of Einstein-Cartan theory [21]. While the original metric formulation is inadequate to incorporate fermionic fields, the new one can do that and is therefore more fundamental. Moreover it is much simpler from the algorithmic point of view and leads to extremely elegant and compact formulae. Cartan’s viewpoint is that adopted in the present book. It is centered around the idea of mobile frames which comes down from Frenet and Serret. It also leads to a simple formulation of the notion of connection that Charles Ehresmann, one of the most brilliant students of Cartan, finally brought to mathematical perfection in the fifties of the XXth century.
Elie Cartan grasped from Frenet and Serret formulae the message that the geometry of an m-dimensional manifold M could be described by attaching an orthonormal frame to each of its points. The evolution of the orthonormal frame from one point to the next one, which can occur in m directions, encodes all information about the intrinsic curvature and torsion of the manifold. Relying on the exterior differential calculus he had created, Cartan introduced a system of m one-forms:
Ea = Eμa (x) dxμ |
(3.2.24) |
which at each point constitute an orthonormal reference frame for controvariant
vectors. πIn modern words {Ea } are a basis of sections of the cotangent bundle |
|
T M = M . Calculating the exterior derivative of the forms Ea |
we can write |
the following formula, just analogous to Frenet and Serret’s formulae: |
|
dEa = −ωab Eb + Ta |
(3.2.25) |
where ωab = −ωba is an antisymmetric-valued one-form and |
|
Ta = Tbca (x)Eb Ec |
(3.2.26) |
is a 2-form which will be named the torsion. If we have no information on the torsion, (3.2.25) is undetermined, namely there are many solutions for the one-form ωab . As we will see, this latter falls into the mathematical category of connections. According to the definition we shall provide in next section, ωab is a connection on a principle bundle P (M , SO(m)) where the base manifold is the considered manifold M and where the structural group is SO(m), namely the Lie group which rotates orthonormal frames among themselves. If we have geometrical or physical reasons to prescribe the value of the torsion, for instance zero (T a = 0), but also any other externally given 2-form, then (3.2.25) uniquely determines the SO(m)- connection ωab . In this case we say that the SO(m)-bundle is soldered to the tangent bundle and the SO(m)-connection ωab becomes a Cartan-connection. Just as in the Frenet-Serret case, the geometry of the manifold, in particular its curvature, is
3.2 A Historical Outline |
107 |
revealed through the calculation of the second derivative, which Cartan immediately understood should be another exterior derivative. Indeed, according to the general theory of principle connections developed in the next section, one can calculate the natural 2-form associated with any connection, which in this case reads as follows:
Rab = dωab + ωac ωcb |
(3.2.27) |
and the expansion of Rab along the orthonormal frame provides a tensor Rabcd which represents the curvature of the manifold:
Rab = Rabcd Ec Ed |
(3.2.28) |
Indeed, as we discuss in a later chapter, Rabcd has a unique invertible one-to-one relation with the Riemann tensor introduced in (3.2.10).
In this way Cartan’s was able to reformulate the entire setup of Riemannian geometry, and with it General Relativity, into the language of exterior differential forms, avoiding the metric tensor of Gauss and Riemann, replaced by the notion of mobile-frames. From the physical viewpoint, Cartan’s approach is also very natural since it can be rephrased as Einstein’s beloved equivalence principle, asserting that we can always find locally inertial reference frames. We will elaborate at length about this point in subsequent chapters.
After digesting the next mathematical sections on principle connections, the reader will also appreciate another important aspect of Cartan’s formulation of gravitational theory: it suppresses its diversity from the other gauge-theories describing non-gravitational interactions. Adopting Cartan’s viewpoint, the fundamental fields describing gravity are also encoded into a connection on a principle bundle as it happens for all other forces. What is special about gravity is the soldering phenomenon, namely the possibility of solving for one part of the connection (ωab ) in terms of the other (Ea ), by imposing an external condition on the torsion Ta . In Einstein-Cartan formulation the condition on the torsion becomes a field equation streaming from the same variational principle which yields Einstein equations on the Riemann tensor and so everything is unified in a consistent, powerful scheme. We will appreciate the relevance of this statement in later chapters.
When Elie Cartan died in 1951, two great mathematicians, Shiing-Shen Chern and Claude Chevalley joined to write an obituary that is also an impressive summary of Cartan’s mathematical work. They said: His death came at a time when his reputation and the influence of his ideas were in full ascent. Undoubtedly one of the greatest mathematician of this century, his career was characterized by a rare harmony of genius and modesty. They also said: Closely interwoven with Cartan’s life as a scientist and teacher has been his family life, which was filled with an atmosphere of happiness and serenity. He had four children, three sons, Henri, Jean, Louis and a daughter, Hélène. Yet fate was quite cruel at least with two of them. Jean Cartan who studied music and was very early recognized as a prominent and talented composer was stolen to his family by premature death from an incurable illness. Louis Cartan, who was a physicist, joined the Resistance during the German occupation of France and, captured by the Nazis, was beheaded in 1943. His father