

5.3.1. Метод средних потерь
Метод средних потерь является наиболее точным и универ-сальным из косвенных методов. Сущность этого метода заключается в определении средних потерь мощности ∆Рср за цикл работы двигателя с последующим сопоставлением их с номинальными потерями мощности ∆Рном, на основании чего и делается заключение о нагреве двигателя. При использовании метода средних потерь рассматривается достаточно удаленный цикл работы двигателя, в котором среднее значение превышения температуры τср двигателя не изменяется. В этом случае количество теплоты Cdτ, аккумулируемое двигателем за цикл, равно нулю и уравнение теплового баланса (4.51) для цикла принимает вид
 Аτсрtц
(5.4)
Аτсрtц
(5.4)
Из (5.4) следует, что
τср =
 /
Аtц = ∆Рср/
A (5.5)
/
Аtц = ∆Рср/
A (5.5)
где / Аtц – средние потери мощности за цикл.
Если теперь потребовать, чтобы τср ≤ τдоп, то с учетом (5.5) и равенства τлоп = ∆Рном/А получим условие
∆Рср ≤ ∆Рном = Рном (1 – ηном) ηном, (5.6)
где Рном, ηном – соответственно номинальная мощность и КПД
двигателя.
Уравнение (5.6) является основным расчетным соотношением метода средних потерь.
В случае, когда на отдельных участках цикла момент на
174
грузки постоянен, как, например, на рис. 5.4, средние потери определяются по формуле
![]() ,
(5.7)
,
(5.7)
где t1,t2,…tk - длительность работы с неизменными потерями.
Для самовентилируемых электродвигателей, работающих с переменной скоростью, например, при пуске, торможении, паузе (рис. 5.4) следует учитывать ухудшение теплоотдачи при пониженной скорости. С этой целью вводятся коэффициенты ухудшения теплоотдачи βср = (1+ βо)/2 ( при пуске и торможении) и формула (5.7) для нагрузочной диаграммы (рис. 5.4) в этом случае примет следующий вид
![]() ,
(5.8)
,
(5.8)
где βо=Ао/Ан - коэффициент ухудшения теплоотдачи.
Метод средних потерь имеет определенный недостаток, так как достаточно трудоемок, поскольку для каждой величины нагрузки к.п.д. двигателя различен.
В связи с этим необходимо иметь график η = f(P2) или при его отсутствии расчетным путем найти эту зависимость. На практике применяют чаще всего менее точные, но более простые методы, базирующиеся на методе средних потерь.
5.3.2. Методы эквивалентных величин
Тепловые
потери состоят из постоянных и переменных
потерь. Постоянные потери (к ) не зависят
от тока нагруз-ки. К ним относятся
потери в стали, потери на трение в
подшипниках, вентиляционные потери.
Переменные по-тери (V) зависят от нагрузки
и в общем случае могут быть выражены
как
![]() ,
где I - ток, протекающий по об-моткам
двигателя, R-
сопротивление обмоток двигателя.
,
где I - ток, протекающий по об-моткам
двигателя, R-
сопротивление обмоток двигателя.
Сущность методов эквивалентных величин состоит в том, что фактические переменные потери мощности, вызывающие
175
нагрев двигателя в рабочий период, заменяются эквивалентными потерями неизменной величины в течение всего рабочего периода, приводящие к такому же нагреву двигателя. Полагая, что двигатель имеет независимую вентиляцию, получим
∆Рср = к + I2эR =
=
![]() ,
(5.9)
,
(5.9)
где Iэ - эквивалентный ток, создающий в обмотках двигателя за цикл работы потери, равные средним потерям. После преобразования (5.9) найдем, что эквивалентный ток равен
![]() .
(5.10)
.
(5.10)
Двигатель будет выбран по нагреву правильно, если его номинальный ток больше или равен эквивалентному, то есть Iн Iэ. Поскольку при постоянном магнитном потоке существует прямая пропорциональная зависимость между моментом и током М=К·Ф·I, то с учетом этой зависимости из (5.10) получим формулу эквивалентного момента
![]() .
(5.11)
.
(5.11)
Далее, если скорость вращения двигателя остается практически неизменной, то, принимая во внимание прямую пропорциональность Р = Мω из (5.11) можно получить формулу эквивалентной мощности
![]() .
(5.12)
.
(5.12)
Двигатель будет выбран правильно по нагреву, если соблюдаются неравенства М н Мэ, Рн Рэ. Во всех случаях двигатель проверяется по перегрузочной способности
Мн ·λ Ммакс (5.13)
176
где λ– перегрузочная способность двигателя,
и пусковому моменту (5.3), то есть Мпуск > Мс трог.
В случае работы двигателя с переменной скоростью (пе-
риоды пуска, остановки и паузы) в знаменатели формул (5.10),
(5.11) и (5.12) нужно ввести поправочные коэффициенты βср и βо, учитывающие ухудшение охлаждения, по аналогии с (5.8).
В том случае, когда на протяжении цикла теплоотдача двигателя на отдельных интервалах различна, например в случае изменения угловой скорости самовентилируемого двигателя, средние эквивалентные потери подсчитывают по формуле
∆Рср.э
=![]() ,
,
где βi — коэффициент ухудшения теплоотдачи на ί-м интервале, соответствующий значению угловой скорости на этом интервале.
Приближенно зависимость коэффициента ухудшения теплоотдачи от угловой скорости можно считать линейной
β = β0 + (1– β0) ω/ωном,
где βо — коэффициент ухудшения теплоотдачи при неподвижном якоре (роторе).
При изменяющейся во времени нагрузки (например, тока I) эквивалентное значение тока Iэ определяют по формуле
 ,
(5.13)
,
(5.13)
определение которого чаще ведется приближенным методом кусочно-линейной аппроксимации по нагрузочной диаграмме, например, кривой тока I(t):
для участка нагрузочной диаграммы с постоянной нагруз-кой
![]() и
и
![]() .
.
177
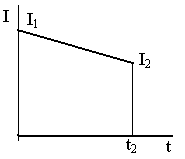
для участка трапециидальной формы
![]() и
и
![]()
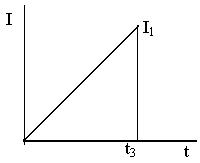
для участка
треугольной формы
![]() и
и
![]()
Эквивалентный ток всей нагрузочной диаграммы определяется эквивалентными токами для каждого участка диаграммы и рассчитывается по формуле
![]() (5.14)
(5.14)
В закпючении необходимо отметить, что методы средних потерь и эквивалентного тока пригодны только для проверки по нагреву предварительно выбранного двигателя.
Методами эквивалентного момента и мощности можно воспользоваться для предварительного выбора двигателя по на-
грузочной диаграмме механизма (или по упрощенной нагрузочной диаграмме двигателя, построенной без учета момента
178
инерции двигателя), считая, что момент (мощность) двигателя равен соответствующим статическим значениям. Такой выбор является более точным, чем выбор по средней мощности.