

3.2.4.2. Режимы торможения двигателя постоянного тока независимого возбуждения
Для двигателя постоянного тока независимого воз-буждения характерны три вида электрического торможения:
Генераторное (рекуперативное) торможение.
Динамическое торможение.
3. Торможение противовключением
Рекуперативное торможение
Условием генераторного торможения является ω > ωо под действием постороннего источника механической энергии.
39
При этом ЭДС обмотки якоря Е будет больше приложенного напряжения сети U . Тогда ток якоря I = (U - E)/R яц изменит
направление (знак) и будет направлен согласно с ЭДС. Смена направления тока приведет к изменению направления электромагнитного момента Мг = – К·Фн·I, который будет направлен против движения электропривода, то есть налицо режим
торможения, когда ω и Мг направлены встречно. Двигатель переходит в режим торможения и работает как генератор параллельно с сетью (рекуперативное торможение).
Уравнение электрического равновесия для этого режима
U = (–I) · R яц + Е, (3.24)
умножим на ток якоря с учетом его знака I<0 и получим
U ·(–I) = I2 · R яS + Е·(–I).
Тогда баланс мощностей примет вид –P1= Р – P2,
где P1<0 означает, что механическая мощность после преобразования отдается в виде электрической мощности в сеть;
P2<0 означает, что к валу двигателя приложена ме-ханическая мощность внешнего источника механической энергии.

Рис. 3.8 Механические и электромеханические харак-
теристики ДПТ НВ в генераторном режиме
40
Уравнение ЭМХ характеристики двигателя постоянного
тока в рекуперативном торможении получим из уравнения
(3.24) после подстановки значения Е
![]() ,
(3.25)
,
(3.25)
Сравнивая уравнения (3.8) и (3.25) видим, что характеристики проходят при токе I = 0 через ωо и ЭМХ ДПТ НВ в режиме рекуперативного торможения является продолжением двигательного режима.
На практике режим рекуперативного торможения образуется при наличии активного статического момента
или при ступенчатом снижении напряжения на обмотке якоря ДПТ НВ.
Динамическое торможение
Известны два вида динамического торможения:
1) с независимым возбуждением, когда обмотка возбуждения питается от постороннего источника;
2) с самовозбуждением, когда обмотка возбуждения подключается к якорю. Применяется в качестве аварийного при отключении источников питания.
Условия динамического торможения:
1. Якорь отключается от питающей сети;
2. Якорь после отключения от сети замыкается на добавочное сопротивление (рис.3.9).
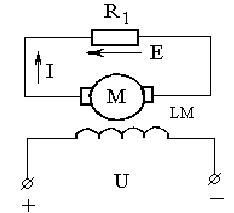
Рис. 3.9 Схема ДПТ НВ при динамическом торможении
41
В режиме динамического торможения источником тока
является ЭДС якоря Е, тогда Iт= – Е/Rяц, то есть ток меняет свое направление и двигатель создает тормозной момент, работая во втором квадранте. Тогда электромеханическая характеристика ДПТ НВ находится из основного уравнения (3.8) при U = 0
ω = -Iя·Rяц/(К·Ф), (3.26)
и представляет прямую линию, проходящую через начало
координат (рис.3.10)
Интенсивность торможения выше при большем значении тормозного момента двигателя. На рис.3.10 это происходит при добавочном сопротивлении R д2 в цепи якоря.
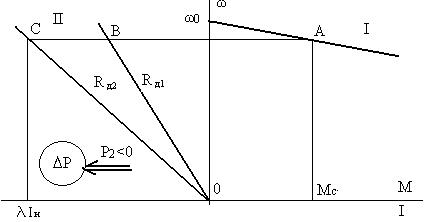
Рис. 3.10. Механические и электромеханические харак-теристики ДПТ НВ в режиме динамического торможения
Баланс мощностей для режима динамического торможения 0 = (–I)2·Rдц+ E·( – I), то есть P1 = 0, P2<0, иными словами, механическая мощность, поступающая от механизма на вал двигателя, преобразуется в электри-ческую Р, которая тратится на нагрев элементов якор-ной цепи. Мощность обмотки возбуждения значительно меньше P2 и на графике баланса мощности обычно не показывается.
Торможение противовключением
Существуют два способа осуществления торможения
42
противовключением для ДПТ НВ:
- изменением направления ЭДС вращения Е;
- изменением полярности напряжения на обмотке якоря.
1. При активном статическом моменте, когда в цепь якоря вводят большое добавочное сопротивление Rд (рис. 3.11). Ток якоря в этом случае уменьшается (т.В), момент двигателя М (т.D) становится меньше активного статического момента Мcа (например, подъемник) и двигатель начинает снижать обороты (МD < Mca и согласно уравнению движения e<0) до
точки К (ω=0), затем под влиянием Мcа реверсируется (ω<0) и разгоняется в направлении, противоположном действию момента двигателя (рис.3.11, прямая КС). После точки К наблюдается режим торможения противовключением, который получил ещё название генераторный режим последовательно с сетью.
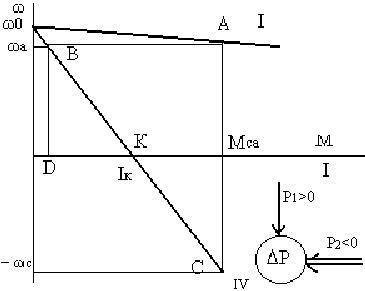
Рис.3.11. Механические и электромехаические характе-ристики ДПТ НВ в режиме торможения противовклю-чением при изменении направления Е
Ток в режиме торможения противовключением по мере возрастания оборотов увеличивается, поскольку со сменой направления вращения (ω< 0) ЭДС изменит свой знак (Е< 0)
43
и будет действовать согласно с напряжением сети, вследствие чего ток становится равным I = (U + Е)/Rяц и растет до значения, при котором тормозной момент достигает величины Мcа. Установившийся режим торможения наступит при скорости - ωс.
Уравнение баланса мощностей для режима торможения
противовключением получим из уравнения электрического равновесия U = I· Rяц + (–Е), умножив его на ток якоря I, при этом получим равенство мощностей в цепи якоря U ·I =
I2· Rяц + (–Е)·I, из которого следует, что Р1>0– двигатель пот-
ребляет активную мощность из сети, P2<0 – к валу двигателя
приложена механическая мощность рабочей машины (действует активный статический момент Мcа ), Р>0 потери мощности в двигателе Р = Р1 + P2.
Таким образом, вся мощность как потребляемая Р1, так и преобразуемая в электрическую P2 тратится на нагрев двигателя, создавая крайне неблагоприятный режим в тепловом отношении, не говоря об энергетической стороне этого режима электромеханического преобразования энергии.
2. Второй способ осуществления торможения про-тивовключением получают путем смены полярности на-пряжения на зажимах якоря. В этом случае ток меняет свое направление и становится отрицательным
IТ = (- Uн - Е)/Rяц<0,
а момент двигателя (рис. 3.12) становится тормозным (т.В). Поскольку полярность напряжения в режиме торможения противовключением совпадает с полярностью ЭДС, то ток в якоре в момент переключения может достичь 20 Iн, что недопустимо по условиям коммутации. Для ограничения тока по условиям коммутации или допустимым ускорениям включают добавочное сопротивление RД в цепь якоря, обеспечивая соблюдения условия IТ < Iдоп, равное RД = (U + Е)/ Iдоп – Rяц.
Тогда уравнение ЭМХ двигателя в режиме торможения противовключением получим из уравнения (3.8) после подстановки в него –U
44
ω = –ωо – IТ·Rяц/(К·Фн) . (3.27)
Характеристика проходит через – о и а (т. В, рис.
3.12). Если при ω = 0 (т. К) Мc2 < Мк, то двигатель изменит направление вращения (совершит реверс) и станет вращаться с частотой – ωс. Если при ω = 0 Мc2 > Мк, то якорь двигателя
будет обтекаться током, оставаясь в неподвижном состоянии,
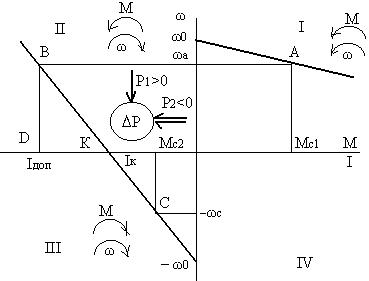
Рис. 3.12 Механические и электромеханические харак-теристики ДПТ НВ при изменении полярности напряже-
ния питания
поскольку ток якоря Iк (по модулю) меньше Iс. Как в первом, так и во втором случае двигатель отключают от сети при достижении ω = 0.
Уравнение баланса мощностей в режиме торможения
противовключением (участок ВК) получают из уравнения электрического равновесия для цепи якоря
–U = (–I) ·Rяц + Е
после умножения на ток якоря с учетом его знака (–I)
(–U)· (–I) = (–I)2 ·Rяц + Е · (–I),
откуда можно сделать вывод об аналогии с режимом тор-можения противовключением при изменении направления
45
ЭДС вращения Е (Р1> 0, P2 <0, Р>0).