

4.2. Механические переходные процессы
4.2.1. Механические переходные процессы при линей-
ной механической характеристике двигателя и
постоянном статическом моменте
Это можно отнести к двигателям постоянного тока независимого возбуждения и асинхронным двигателям с фазовым ротором, работающим на естественной или реостатной харак- теристике до 1,5 Мн.
Переходные процессы этого вида имеют место при неучете электромагнитной инерции обмоток ДПТ.
Исходными является основное уравнение движения электропривода (2.5)
![]()
и уравнение электрического равновесия (3.1)
U = кфω + iR.
При исследовании переходного процесса полагаются неизменными: магнитный поток двигателя Ф, напряжение сети U, и момент нагрузки Мс. Кроме того, индуктивность обмотки якоря при-
нимается Lя = 0. Подставляя в уравнение (2.5) значение момента
121
из (3.3), можно определить значение тока
i
=
![]() .
(4.5)
.
(4.5)
После подстановки в (3.1) и деления обеих частей на кф полу-
чим
![]() ,
,
или
ω0 = ω
+ ТМ![]() ∆ωс
∆ωс
или
ТМ + ω = ω0 - ∆ωс = ωс. (4.6)
Здесь ω0 = U/кф — угловая скорость двигателя при идеальном холостом ходе; ∆ωс = МсR/(кф)2 — перепад угловой скорости при нагрузке моментом МС (рис. 4.6); ТМ = JR/(кф)2 =
= Jω0 / Mкз— электромеханическая постоянная времени.
Электромеханической постоянной времени называется время, в течение которого привод, обладающий моментом инерции J,
разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода ω0 при неизменном моменте, равном моменту короткого замыкания Мк,3.
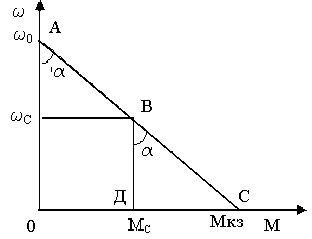
Рис.4.6. Механическая характеристика ДПТ НВ
122
Уравнение (4.6) представляет собой линейное дифференциальное уравнение первого порядка с правой частью. Правая часть представляет установившееся значение ωуст.
Решение этого уравнения дает:
ω
= ωуст
+
С![]() ,
(4.7)
,
(4.7)
где С – постоянная интегрирования, определяемая из на-чальных условий переходного режима.
Для t = 0 начальное значение частоты вращения ω = ωнач,
поэтому при подстановке в (4.7) этих значений получим
ωнач = ωуст + С.
После подстановки в (4.7) полученного значения постоянной интегрирования С , получим уравнение переходного процесса для скорости в общем виде
ω = ωуст
(1
-
![]() .
(4.8)
.
(4.8)
В частном случае при ωнач = 0 уравнение упрощается
ω = ωуст
(1
-
![]() .
.
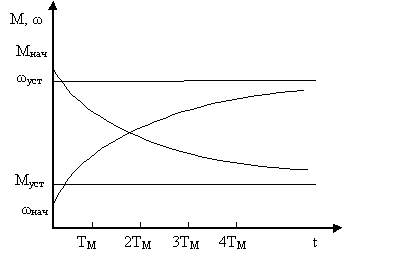
Из уравнения (4.7) следует, что изменение угловой скорости двигателя в механическом переходном процессе (МПП) происходит по экспоненте (рис.4.7).


Рис. 4.7. Переходный процесс ДПТ НВ при пуске
123
Как видно из расчетных данных, переходный процесс заканчивается с точностью до 5 % за 3Тм и с точностью до 2 % за 4 Тм, то есть практически можно считать, что переходный процесс длится tп =(3…4)·Тм.
Определив из (4.7)
![]()
и подставив значение производной в уравнение (4.5) для тока, получим
i
=
![]() (4.9)
(4.9)
Для начальных условий при t = 0; i = Iнач постоянная интегрирования
С = (Iс-
Iнач )![]() .
.
где Ic
=
![]() –
ток нагрузки.
–
ток нагрузки.
ί,ω
Iнач
Iуст
.
Рис 4.8. Переходные процессы ДПТ НВ
Подставив постоянную интегрирования в (4.9), найдем
ί
= Ic
– (Iс- Iнач
)![]() ,
,
124
или, по аналогии с (4.8)
![]() (4.10)
(4.10)
Результирующий график переходного процесса можно представить в виде рис.4.8.
Длительность переходного процесса можно определить из уравнений (4.8), (4.10). Например, из (4.8)после преобразова-
ний
получим е -
t/Tм
=![]() .
.
После его логарифмирования избавимся от знака "минус" перед дробью. Тогда длительность переходного процесса
tП
=
TMln![]() . (4.11)
. (4.11)
Аналогично из (4.10) можно получить уравнение
tП
= TMln![]() .
(4.12)
.
(4.12)
При определении длительности переходного процесса возникают некоторые трудности, заключающиеся в том, что в установившемся режиме ωКОН = ωС = ωУСТ и в уравнении (4.11) tП стремится к бесконечности. Поэтому считают, что переходный процесс заканчивается, когда ωКОН =ωС – 0,05(ωС – ωНАЧ), то есть ωКОН принимают на 5 % меньше полного изменения скорости за время переходного процесса, что соответствует длительности 3Тм. Аналогично принимают IКОН=IС+0,05(IНАЧ-IС).
Как было показано ранее, решение линейного дифференциального уравнения первого порядка (4.7) представляет собой экспоненту (4.9), (4.12), (4.13). Одно из свойств экспоненты заключается в том, что касательная, проведенная к любой точке экспоненты, отсекает отрезок асимптоты, заключенный между ординатой, проведенной из точки касания, равный постоянной времени (рис.4.9). Указанное свойство применяется на практике, когда известна экспериментально снятая кривая изменения частоты вращения, тока или момента.
Обобщая сведения о механических переходных процес-
125
сах, можно заключить, что при линейной механической характеристике двигателя и постоянном статическом моменте переходные процессы описываются экспонентой, для построения которой необходимо знать начальные и конечные условия и электромеханическую постоянную времени. Конечные условия определяют из статических механических характеристик. Следует иметь в виду, что для торможения конечное значение скорости условно принимают таким, как это имело бы место при активном статическом моменте независимо от действительного характера нагрузки.
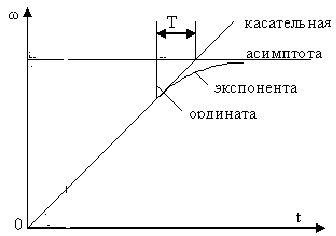
Рис. 4.9. Определение Тм