

3.5.4.2.Изменение напряжения питания
Снижение напряжения питания связано со значительным уменьшением критического момента Мки = Мке(U1/U1н) 2 при
сохранении постоянным критического скольжения (рис. 3.35).
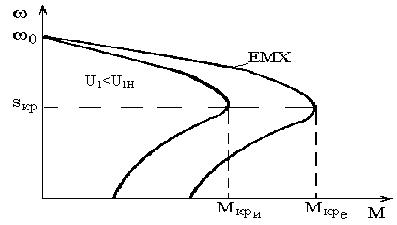
Рис. 3.35. Искусственные механические характеристики
АД при изменении напряжения питания.
3.5.4.3.Изменение числа пар полюсов
Для изменения числа пар полюсов необходимо, чтобы в ста-торе были уложены либо независимые обмотки возбуждения с различным значением числа пар полюсов (лифтовые двигате-ли), либо при одной обмотке статора имелась возможность из-менения ее схемы соединений. В этом случае обмотка каждой фазы состоит из двух полуобмоток. Принцип изменения числа пар полюсов можно проследить по схеме включения секций одной фазы обмотки статора (рис. 3.36). Он заключается в из-менении направления тока в одной из полуобмоток. Число пар полюсов при этом изменяется в два раза.
73
При переключении обмоток каждой фазы с последова-тельного соединения на параллельное число пар полюсов уменьшается вдвое, а синхронная скорость вращения возрас-тает. Критический момент двигателя при различных числах полюсов зависит от конструктивного исполнения обмоток.. На рис. 3.37 показаны механические характеристики двухскорост-ного асинхронного двигателя.
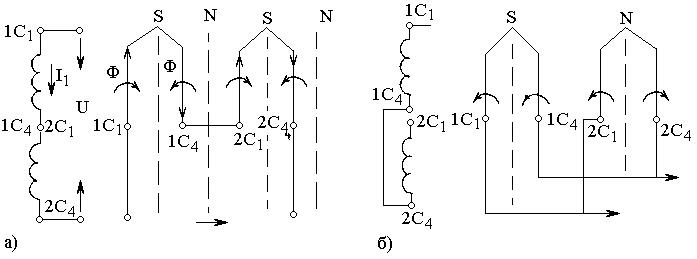
а) 2р=4; р=2; б) 2р=2; р=1
Рис.3.36. Схема переключения обмоток статора для
изменения числа пар полюсов
На практике наибольшее применение получили схемы переключения числа пар полюсов со "звезды " на "двойную звезду" (рис. 3.37а), или с "треугольника " на "двойную звезду" (рис. 3.37б). Тогда потребляемая мощность при соединении в "звезду" определяется
Pзв = 3U1н·I1н ·cosφзв . (3.57)
При соединении в "двойную звезду"
Pдв.зв = 3·U1н·2·I1н·cosφдв.зв (3.58)
Поскольку cosЗв = cosдв.зв, то допустимый момент двигате-
ля для обеих схем соединений обмоток остается неизменным
Mзв = Pзв/1зв= ·U1н·I1н·cosφ/1зв . (3.59)
Мдв.зв = Pдв.зв/1дв.зв = 2· ·(U1·I1·cosφ)/1дв.зв (3.60)
Поскольку 1дв.зв = 21.зв , то получимМзв = Мдв.зв
74
3.5.4.4 Изменение частоты питающей сети
При регулировании частоты питающего напряжения ме-няются: синхронная скорость вращения ω1; критический
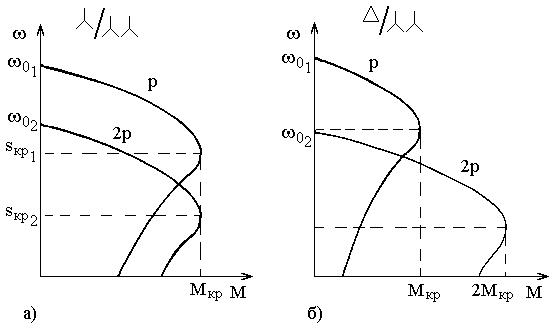
а) с постоянным моментом; б) с постоянной мощностью
Рис. 3.37. Механические характеристики АД при изме-
нении числа пар полюсов
момент, поскольку изменение частоты влияет на реактивное сопротивление машины Хк; критическое скольжение sк, свя-занное с параметром Хк. Реактивное сопротивление короткого замыкания
Xк = 2·p·f1· (3.61)
где Lк – индуктивность обмоток двигателя, Гн .
Поскольку R1<<Xк, то в уравнении критического сколь-
жения sк =
![]() величиной R1 можно пренебречь,
тогда sк = R'2/(2·p·f1·Lк).
Из соотношения критических скольжений
для двух различных частот получим
величиной R1 можно пренебречь,
тогда sк = R'2/(2·p·f1·Lк).
Из соотношения критических скольжений
для двух различных частот получим
s'к/sк = f1н·R'2·2·p·Lк/(f1·R'2·2·p·Lк) = f1н/f1, (3.62)
откуда находим
s'к = sк·f1н/f1 (3.63)
Из данного уравнения видно, что критическое скольжение асинхронного двигателя обратно пропорцио- нально частоте сети. Критический момент при частоте f1, от-
75
личной от номинальной, равен
М'к = Mк·(f1н/f1)2 . (3.64)
При уменьшении частоты f1<fн снижается угловая скорость ω1,
а магнитный поток
Ф увеличивается. Это приводит к глубокому
насыщению магнитной цепи и увеличению
намагничивающего тока Im,
что вызывает снижение энергетических
показателей двигателя (cosφ и η). Для
того, чтобы поток Ф оставался постоянным,
необходимо при изменении частоты f1
также изменять напряжение с учетом вида
механической характеристики исполнительного
органа рабочей машины. Например, при
постоянном статическом моменте следует
соблюдать равенство U1/f1=const,
при гиперболической механической
характеристике (металлорежущие станки)
– равенство U1/![]() = const.
= const.
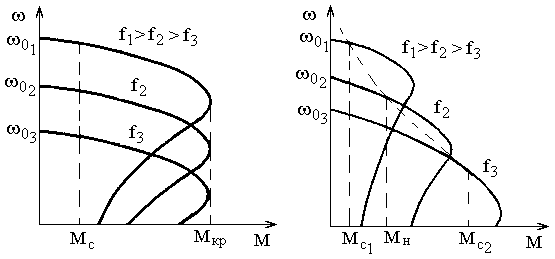
f1>f2>f3.
а)
при
U1/f1=const б)
U1/![]() = const
= const
Рис. 3.38. Механические характеристики АД при изменении
частоты питающей сети
На рис. 3.38 приведены механические характеристики
асинхронного двигателя при регулировании частоты пре-
образователя: а)
при U1/f1 = const; б) при U1/![]() ,
где увеличение частоты источника
питания выше номинальной ( 50 Гц )
,
где увеличение частоты источника
питания выше номинальной ( 50 Гц )
осуществляется при номинальном напряжении U1Н, что приводит к уменьшению магнитного потока и электромагнитного момента, поэтому следует в этом случае снижать нагрузку во
76
избежание «опрокидывания» двигателя.