

3.6. Механическая и угловая характеристики
синхронного двигателя
Из теории электрических машин известно, что синх-ронный двигатель (СД) имеет трехфазную обмотку статора, на которую подается трехфазный ток, создающий вращающееся магнитное поле, подобно АД. На роторе имеются две обмотки: пусковая (демпферная) обмотка и обмотка возбуждения, на которую подается постоянный ток. В синхронном режиме ротор вращается со скоростью магнитного поля статора, то есть синхронно с ним.
Синхронные двигатели большой мощности (200 кВт и вы-
ше) дешевле асинхронных и обладают, кроме того, компенсационными свойствами. В последнее время, в связи с развитием силовой полупроводниковой техники, в частности, частотных преобразователей, стало возможным применять СД в регулируемых приводах.
Различают СД с неявнополюсными роторами при скорости ≥1500 об/мин и явнополюсными роторами при частотах вращения 1000 об/мин и менее (до 100 об/мин).
3.5.1. Электромеханическое преобразование энергии
в синхронном двигателе
Принципиальная электрическая схема синхронной машины с обмоткой возбуждения и демпферной обмоткой приведена на рис. 3.35. Там же показано направление потоков мощности.
Обмотка статора трехфазная, аналогичная статорной обмотке асинхронного двигателя. При подаче трехфазного напряжения на обмотку статора в ней создается вращающееся магнит- ное поле, синхронная скорость которого равна 1
![]()
91
Рис. 3.47. Схема и потоки энергии в синхронном
двигателе (СД)
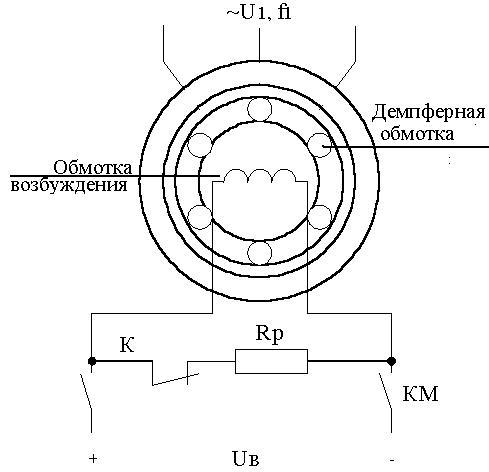
Рис. 3.48. Принципиальная электрическая схема СД
Вращающееся магнитное поле наводит ЭДС в пусковой обмотке, расположенной на роторе, и по обмотке протекает ток, который способствует возникновению электромагнитного момента, подобно асинхронному двигателю. Под действием этого момента ротор начинает вращаться, достигая подсинхронной скорости, когда в обмотку возбуждения подается по
стоянный ток. Возникает постоянное магнитное поле, при
92
взаимодействии которого с вращающимся магнитным полем статора двигатель втягивается в синхронизм и начинает работать на механической характеристике (рис. 3.49) со статической жесткостью
![]() .
.
Рис. 3.49. Механическая характеристика СД
При этом возникает ряд вопросов, связанных с дальнейшей работой синхронного двигателя:
1.Какова зависимость момента М от параметров СД и нагрузки?
2. Какие условия выхода двигателя из синхронизма?
3. От чего зависит максимальный момент Мmaх двигателя и можно ли управлять им?
Рассмотрим векторную диаграмму СД c явнополюсным ротором в осях d и q, причем обмотка возбуждения размещена на оси d (рис.3.50). На этой диаграмме приняты следующие обозначения:
![]() - векторы фазных
э.д.с. обмотки статора и нап-
- векторы фазных
э.д.с. обмотки статора и нап-
![]() - вектор фазного
тока статора;
- вектор фазного
тока статора;
xc - индуктивное сопротивление фазы статора;
xd - индуктивное сопротивление фазы статора по продольной оси d;
93

Рис. 3.50. Векторная диаграмма СД
xq - индуктивное сопротивление фазы статора попопереч-ной оси q;
φ – фазовый угол сдвига между током статора и напряже-нием сети;
θ – внутренний угол сдвига между э.д.с. статора и напря-жением сети;
ψ - угол сдвига между э.д.с. статора и током статора.
Момент, развиваемый машиной, может быть определен на основе упрощенной векторной диаграммы напряжений синхронного двигателя, приведенной на рис. 3.50. Диаг-рамма не учитывает активного падения напряжения в об-мотке статора. Это допущение упрощает определение мощности и момента двигателя и не вносит значительной
ошибки. Электромагнитная мощность при этом равна мощности, потребляемой из сети, т. е.
Рэм = 3Uicos φ
Отсюда
М =
![]() =
=
![]() .
(3.80)
.
(3.80)
94
Из векторной диаграммы могут быть получены следующие соотношения:
φ = θ + ψ; (3.81)
sin
θ =![]() ;
(3.82)
;
(3.82)
сos
θ =![]() ;
(3.83)
;
(3.83)
sin
ψ =![]() ;
(3.84)
;
(3.84)
cos
ψ =![]() .
(3.85)
.
(3.85)
Подставляя в (3.80) значение угла φ из (3.81), будем иметь
М =
 .
.
Учитывая выражения (3.84) и (3.85), имеем
М =
![]()
и с учетом выражений (3.82) и (3.83)
М =
![]()
![]() )
=
)
=
=![]() .
(3.86)
.
(3.86)
Выражение (3.86) называют угловой характеристикой СД и как следует из него, электромагнитный момент состоит из двух слагаемых:
синхронного (основного) момента Мсин, пропорцио-нального индуктированной э.д.с. и sin θ ;
реактивного момента, возникающего в двигателе без возбуждения из-за наличия явнополюсной системы.
95
В двигателе с неявнополюсной системой ха = хд и реактивный момент равен нулю.
Синхронный момент возрастает с увеличением угла θ и достигает своего максимального значения при θ = 90°; при дальнейшем увеличении угла 6 момент двигателя падает. Таким образом, устойчивая работа возможна при углах θ, не превышающих 90°.
Учитывая возможность толчков нагрузки, стараются иметь θном = 200 - 30°. При этих условиях перегрузочная способность синхронного двигателя будет:
λ =
![]() ≈ 2 – 3.
≈ 2 – 3.
В связи с тем, что синхронный момент прямо пропорционален первой степени напряжения и первой степени э. д. с. от магнитодвижущей силы основного возбуждения, перегрузочная способность двигателя может быть повышена в моменты пиков нагрузки увеличением возбуждения.

Рис. 3.51. Зависимость электромагнитного момента синхронного двигателя и его составляющих от угла θ.
96
Зависимость электромагнитного момента и его составляющих — синхронного и реактивного моментов — от угла θ представлена на рис. 3.51. Из кривых моментов следует, что у дви-
гателей с явнополюсной системой максимальное значение электромагнитного момента за счет влияния реактивного момента имеет иместо при θмакс < 90°.