

4.2.3. Механические переходные процессы в режиме
динамического торможения
В указанном режиме двигатель отключается от сети и якорь замыкается на добавочное сопротивление, величина которого определяется из условий коммутации с учетом допустимых ускорений в электроприводе. Статические механические характеристики для режима динамического торможения представлены на рис.4.12.

M
I
Mc
Рис.4.12 . Механические характеристики ДПТ НВ
в режиме динамического торможения
В переходном процессе начальные и конечные условия:
129
![]()
Уравнения, описывающие переходный процесс в режи-ме динамического торможения, аналогичны уравнениям (4.8), (4.10), при подстановке в них начальных и конечных условий. Тогда для угловой скорости и тока уравнения примут вид
ω
= ωТдин
(1
-
![]() .
.
![]()
где Т 'м
=
![]() – электромеханическая постоянная
времени в режиме динамического торможения.
– электромеханическая постоянная
времени в режиме динамического торможения.
Кривые переходного процесса тока якоря и угловой скорости показаны на рис. 4.13
tдт0
Ic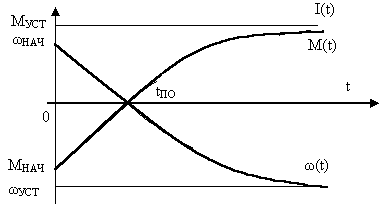


Р
ωc
ITдин
ωТдин
реверса
Длительность переходного процесса вычисляется по формуле (4.11) или (4.12). Время достижения ω = 0 при динамическом торможении составит tдт0.
![]() .
.
В случае активного статического момента переходный процесс продолжится до Iс и - ωТдин.
130
4.2.4. Переходные процессы при реостатном пуске
ДПТ НВ
ί,ω
ω1
t1
t2
t3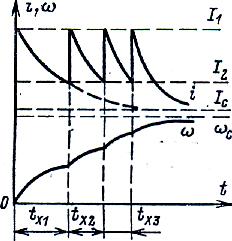





 При многоступенчатом
резисторном пуске двигателя постоянного
тока независимого возбуждения и
постоянном напряжении
сети задаются обычно определенными
границами колебаний
пускового тока или пускового момента.
Этот процесс описан в §3.2.5, где на рис.3.14
представлены механические характеристики
реостатного пуска ДПТ НВ. В
этом случае для нахождения времени
пуска удобнее пользоваться в качестве
исходного не уравнением угловой скорости,
а уравнением тока (4.10).
При многоступенчатом
резисторном пуске двигателя постоянного
тока независимого возбуждения и
постоянном напряжении
сети задаются обычно определенными
границами колебаний
пускового тока или пускового момента.
Этот процесс описан в §3.2.5, где на рис.3.14
представлены механические характеристики
реостатного пуска ДПТ НВ. В
этом случае для нахождения времени
пуска удобнее пользоваться в качестве
исходного не уравнением угловой скорости,
а уравнением тока (4.10).
Рис. 4.14. Переходные процессы ДПТ НВ при реос-
татном пуске
Процесс пуска двигателя в несколько ступеней, изображенный на рис.4.14, характерен тем, что ток двигателя во время пуска колеблется в пределах от I1 до I2. В начале пуска Iнач = I1, далее по мере ускорения двигателя растет его ЭДС, вследствие чего начинает уменьшаться ток в цепи якоря двигателя, а следовательно, и момент двигателя. Когда ток достигнет некоторого значения I2, выключается часть пускового резистора с таким расчетом, чтобы ток двигателя снова достиг значения I1 и т. д. Найдем время /*, в течение которого ток двигателя изменяется от I1 до I2. Для этого воспользуемся урав-
131
нением (4.10), написав его в следующем виде:
I2
= Ic(1
-
![]() (4.13)
(4.13)
где I1 и I2 — границы изменения пускового тока (рис.4.7); t1 — время разбега двигателя на рассматриваемой ступени пускового резистора; Тм1— электромеханическая постоянная времени для той же ступени.
Постоянная времени для каждой ступени резистора соответствует суммарному сопротивлению цепи якоря.
Если значение тока нагрузки Iс не изменяется, то под знаком логарифма стоит постоянная величина и, следовательно, можно написать:
tn = kTмn.
По мере выведения резистора сопротивление цепи якоря уменьшается, а следовательно, уменьшается и электромеханическая постоянная времени, что приводит в свою очередь к уменьшению времени разбега на каждой последующей ступени, т. е. t1 > t2 > t3 и т. д.
Приведенная на рис. 7.5 зависимость i = f(t) построена на основании (4.10) с учетом сказанного выше, а кривая угловой скорости двигателя ω= f (t) построена по (4.8).