

3.5.6. Реостатный пуск асинхронного двигателя
с фазным ротором
Реостатный пуск АД с фазным ротором (включение на время пуска дополнительное (пусковое) сопротивление в цепь ротора) позволяет решить сразу две проблемы:
- снизить до допустимого значения величину пускового тока;
- увеличить величину пускового момента.
При этом необходимо решить две задачи (как для ДПТ НВ)
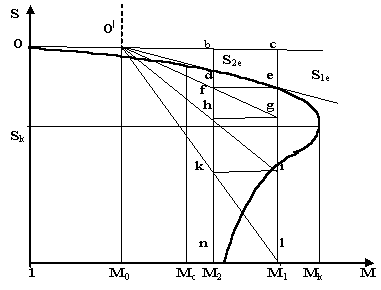
– определить количество ступеней пускового реостата и величины этих ступеней. Для этого вначале строится пусковая диаграмма АД (рис.3.46).
Для двигателей до 100 кВт применяется уточненная (рис. 3.46) , а при мощности более 100 кВт –упрощенная методика расчета и построения пусковой диаграммы АД с ФР.
Этапы построения пусковой диаграммы следующие:
1) по паспортны данным строится естественная механи-ческая характеристика (методика дана в параграфе 3.4.3);
2) на оси моментов откладывются два момента переклю-чения М1 и М2, причем М1 выбирается из соотношения М1 ≤ (0,8 – 0,85) Мк (где меньшее значение принимается для нормального пуска, большее значение для форсированного пуска), а М2 ≥ 1,2 Мс. и через эти точки-моменты переключения – проводятся вертикальные прямые до пересечения с естественной характеристикой (первая – через момент М1, вторая – через момент М2).
3) через точки пересечения этих прямых с естественной ха-
86
![]()






s4
s3




![]()
![]()
s2
![]()
s1

Рис. 3.46. Пусковая диаграмма АД с фазныи ротором
ракткристикой (точки d и е) проводится прямая до пе-ресечения с горизонтальной прямой, проведенной через скольжение, равное 0. Эта точка пересечения на рис.3.46 обозначена как 0| и называется условным полюсом.
4) через эту точку проводится новая ось с координатой на оси моментов М0. Этот момент характерен для уточненной пусковой диаграммы.
5)проводят первую прямую линию через точки М1 и 0|, которая пересекает вторую вертикальную линию, проведенную через момент переключения М2, в точке k. Эти точки М1 и k принадлежат первой искусственной реостатной характеристике.
6) через точку k проводят горизонтальную линию до пе-ресечения в точке l с первой вертикальной линией, прове-денной через момент переключения М1. Снова мы имеем две точки 0| и l, которые принадлежат второй искусственной реостатной характеристике и т.д.
Таким образом, мы имеем пусковую диаграмму с началом координат в точке М0 и тремя искусственными реостатными
87
характеристиками, характерную для ДПТ НВ. Учитывая, что критический момент для всех характеристик остается неизменным и применяя выражения (3.51) или (3.52), по моменту М1 и скольжениям S1, S2 и S3 в первую очередь определяют критические скольжения на искусственных характеристиках Sк1, Sк2, Sк3, а затем по тем же выражениям строят механические характеристики АД. Теперь, учитывая, что отрезок ce (рис.3.46) в масштабе равен приведенному сопротивлению ротора, можно по аналогии с ДПТ НВ вычислить ступени пускового реостата, т.е. Rп1 (первая ступень) будет равна
![]() ;
вторая ступень Rп2 =
;
вторая ступень Rп2 =![]() ;
третья ступень Rп3=
;
третья ступень Rп3=![]() .
.
Таким образом, графически было определено число ступеней и величины ступеней пускового реостата. При очевидной простоте своей графический метод дает достаточно большие погрешности, от которых свободен аналитический метод расчета. Ниже будет сделан вывод аналитического метода.
Возьмем две механические характеристики, например, пер-
вую и вторую с точками kl для первой характеристики и точками ih для второй характеристики. Для них будут характерны следующие соотношения (рис.3.46):
для переключающего
момента М1:
 (3.74)
(3.74)
для переключающего
момента M2:

Следовательно,
![]() =.
=.![]() .
.
Для второй и третьей характеристики с точками ih и gf аналогично можно показать, что
 .
(3.75)
.
(3.75)
88
Следовательно, для всех реостатных характеристик будут
справедливы соотношения
![]() ,
,
где m – число ступеней пускового реостата.
Поэтому, учитывая
S1 = 1, любые скольжения
реостатных характеристик в момент
переключения М1 можно выразить
через S2, т.е. S3
=
![]() ;
;
S4
=
![]() ;
;
----------------------
![]() .
.
Учитывая, что последнему m-му переключению ступени соответствует скольжение Sm+1= Se1, то окончательно можно записать
S2
=
![]() .
(3.76)
.
(3.76)
Зная S2, можно определить М0:
![]() .
(3.77)
.
(3.77)
При определении сопротивлений ступеней пускового реостата сначала определяется величина фазы ротора при полностью включенных пусковых сопротивлениях, учитывая что отношение полного сопротивления ротора к скольжению есть величина постоянная, т.е.
![]() .
.
Учитывая, что S1 = 1
![]() (3.78)
(3.78)
А затем определяются сопротивления фаз для других сту-пеней пускового реостата.
89
Для второй ступени пускового реостата из (3.74)
![]()
Сопротивление фазы ротора для третьей ступени пускового реостата из (3.75)
![]()
Сопротивление фазы ротора любой i-й ступени:
![]() .
.
Вследствии того, что сопротивления ступеней равняется разнице между соседними сопротивлениями фаз роторной цепи, можно определить сопротивление любой ступени пускового реостата. Сопротивление i-й ступени пускового реостата
![]() .
(3.79)
.
(3.79)
Например,
![]() ;
;
![]() .
.
Таким образом, основой расчета является скольжение S2, которое определяется из выражения (3.76). Но для расчета требуется знать число ступеней пускового реостата m и скольжение на естественной характеристике Se1 при моменте М1, которым обычно задаются: М1= (0,8 −0,85)Мк. Величина Sе1 может быть найдена из выражений (3.51) или (3.52).
Для расчета числа ступеней пускового реостата m может
быть рекомендован следующий порядок. Определяется из выражений (3.51) или (3.52) Sк1 при S1 = 1 и М1, после чего из тех же выражений определяется при М2 ≤ 1,2МС скольжение S2 (рис.3.46), а затем в соответствии с выражением (3.76) расчитывается число ступеней m пускового реостата. Если это число не целое, то оно округляется до ближайшего целого. Затем, пересчитав в соответствии с выражением (3.76) скольжение S2, находят из выражений (3.51) или (3.52) М2 для первой реос-
татной механической характеристики и сравнивют с Мс на соблюдение неравенства М2 ≤ 1,2МС.
90
После чего приступают в соответствии с выражением (3.79) к расчету величин ступеней пускового реостата.