

3.2.3. Искусственные электромеханические и
механические характеристики двигателя
постоянного тока независимого возбуждения
Из формул электромеханической (3.8) и механической (3.9) характеристик ДПТ НВ просматриваются три способа получения искусственных характеристик – это путем изменения добавочного сопротивления внешнего резистора Rдя , напряжения источника питания U, магнитного потока Ф.
3.2.3.1. Реостатные характеристики
Получаются путем введения в цепь якоря дополнительных активных сопротивлений резисторов, т.е. Rяц = Rя+Rдя = var при U = Uн, Ф = Фн . Как видно из уравнения механической характеристики (3.9), при варьировании величины добавочного сопротивления Rдя в цепи якоря скорость идеального холостого хода остаётся постоянной ωо = Uн / КФн, изменяется лишь модуль статической жесткости , а с ним и крутизна характеристики (рис. 3.3).
Например, при введении добавочного резистора со-противлением Rдя= Rяц модуль статической жесткости ис-кусственной характеристики (ИМХ) и в два раза меньше, чем для естественной механической характеристики (ЕМХ) е, т.е. и = 0,5е. Соответственно в два раза возрастет статический перепад скорости ωси = 2 ωсе .
В относительных единицах реостатную механическую харак-
теристику можно записать
ω* =1– М*·R*яц =1– М*·(R*яц + R*дя) (3.23)
При номинальном моменте или токе
ω*ни = 1– R*яц=1– R*яц + R*дя = ω*не – R*дя= = ω°не – ω*Rдя, ,
где ω*Rдя – статический перепад скорости, обусловленный добавочным резистором.
По условию допустимого нагрева ток якоря не должен
34
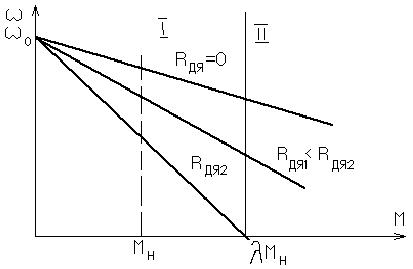
I- рабочая зона, II – нерабочая зона
Рис. 3.3. Реостатные характеристики
превышать номинального значения, т.е. Iя доп = Iян, тогда Мдоп = КФнIя доп = КФн ·Iян = Мн.
Потребляемая мощность при этом регулировании, если
Iя = Iн, составляет
Р1 = Uн· Iя = КФн·ωo· Iян = ωo · Мн = Р1н.
Механическая мощность на валу двигателя равна
Pм = Р2= ω· Мн,
а КПД двигателя в этом случае будет равно
= Рм/ Р1н = (ω·Мн)/(ωo·Мн) = ω/ωо.
3.2.3.2. Изменение магнитного потока
Как уже отмечалось, магнитный поток целесообразно из-
менять только в сторону уменьшения от номинального значе-
ния, поэтому такой способ регулирования осуществляется за
счет ослабления магнитного потока возбуждения двигателя. При этом соблюдаются условия: U = Uн; Rдя= 0. В случае варьирования магнитным потоком изменяется как модуль статической жесткости и= е (Ф)2, так и скорость идеального холостого хода ω 0и = ω0е /Ф.
Из уравнения (3.8) электромеханической характеристики (ЭМХ) следует, что с уменьшением магнитного потока, хотя и
35
возрастает ω0и , но все электромеханические характеристики имеют общую точку Iк .з = Uн / RяS при ω = 0 (рис. 3.5).
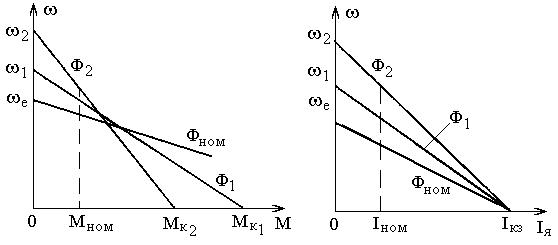
Ф2 < Ф1< Фном
Рис. 3.4 Механические Рис. 3.5 Электромехани-
характкристи ческие характеристики
Механические характеристики (рис.3.4) отличаются от электромеханических тем, что при ω = 0 имеют разные значения моментов короткого замыкания Мк.= КФ·Iк вследствие разной величины магнитного потока: Мке > Мк1 >Мк2.
Электромеханические и механические характеристики в
относительных единицах:
ω* = 1/Ф* – I°* ·R*яц/Ф*; ω* = 1/Ф* – М* ·R*яц/(Ф*)2
отличаются друг от друга
Регулирование скорости изменением магнитного потока по условию нагрева допускается при Iн . Тогда величина допустимого момента будет равна
Мдоп = К·Ф·Iн = (Uн – Iн· Rяц ) Iн /ω, (3.24)
поскольку значение КФ из уравнения ЭМХ (3.8) составляет
КФ = (Uн – Iн· Rяц)/ω.
В соответствии с уравнением (3.24) момент с увеличением частоты вращения уменьшается по гиперболической зависимости. Максимальная скорость определяется механической
прочностью двигателя и приводится в его паспортных данных
36.
(находится в пределах от 2 до 8 номинальных скоростей).