

3.3.3 Режим реостатного пуска дпт пв
Расчет сопротивлений резисторов для пуска двигателей последовательного возбуждения может быть произведен следующим графо-аналитическим методом, не требующим построения самих реостатных характеристик двигателя.
В начале строится естественная характеристика двигателя ω = f (I). На оси тока откладываются два отрезка со значением I1≤ 2,5Iн и I2 ≥ 1,2Ic и через них проводятся вертикальные линии до пересечения с естественной характеристикой в точках 1 и 2 ( рис. 3.26 ). Затем через эти точки проводятся пунктиром горизонтальные линии до пересечения с вертикалью Af в точках f и е
Рис. 3.26. Графическое построение ступеней пускового
реостата ДПТ ПВ
Вертикаль Af расположена влево от начала координат на расстоянии ОА, соответствующем внутреннему сопротивлению
двигателя. Откладываем в том же масштабе отрезки ОВ = R1 = U/I1 и OC = R2 = U/ I2. Соединяя точки B и e, а также C и f, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его
59
якорной цепи при неизменном токе якоря, Последнее вытекает из выражения
ω = (U - IR)/kФ = A—ВR.
Для определения числа пусковых ступеней и их соп-ротивлений поступают следующим образом. Проводят вертикаль через точку B до пересечения с Cf в точке b. Затем через точку b проводят линию, параллельную оси абсцисс, до точки с на линии Bе. Аналогично проводятся линии сd и de. Построение считается удачным, если последняя горизонталь проходит через точку е. Если этого не произойдет, то построение следует повторить, изменив наклон одной из прямых Bе или Cf за счет выбора новых значений I1 и I2 (чаще изменяют только I2).
На рис.3.26 дано построение с числом ступеней рео-стата, равным двум. Из построения ясно, что отрезок bс соответствует сопротивлению первой ступени реостата, а dе — второй. В момент пуска (при ω = 0) ток в якоре будет равен I1, а сопротивление всей якорной цепи R1 = U/I1. При разгоне двигателя до скорости ω1 ток уменьшается, а сопротивление якорной цепи не изменяется. В точке b сопротивление то же, но ток равен I2. Затем при ω = ω1 происходит шунтирование первой ступени, общее сопротивление якорной цепи становится соответствующим отрезку сg , а ток вновь достигает значения I1 и т. д., пока двигатель не начнет работать на естественной характеристике.
3.4. Электромеханические и механические
характеристики двигателя постоянного тока
смешанного возбуждения
Характеристики двигателя смешанного возбуждения
ДПТ СВ) получают на основании тех же формул (3.8) и (3.9), что и для двигателя постоянного тока с независимым возбуждением. Однако магнитный поток этого двигателя зависит от 60потока Ф1, создаваемого током независимой обмотки возбуждения, и потока Ф2, создаваемого током обмотки последова-
60
тельного возбуждения, то есть Ф = Ф1+Ф2.
Так как значение Ф2 определяется током нагрузки, то для построения характеристик используют универсальные рабочие характеристики, представленные на рис. 3.27.
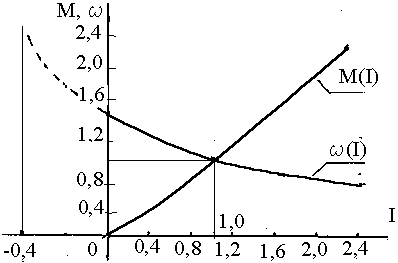
Рис. 3.27. Универсальные рабочие характеристики
ДПТ СВ
Схема включения ДПТ СВ приведена на рис. 3.28 а, а механические характеристики имеют вид (рис. 3.28 б), где пря-мые 1,2 –характеристики динамического торможения, 3,4,5 – реостатные характеристики. При регулировании частоты вращения ДПТ смешанного возбуждения используют способы, что и для двигателя постоянного тока с параллельным возбуждением, то есть за счет Uc, Rд и Ф .
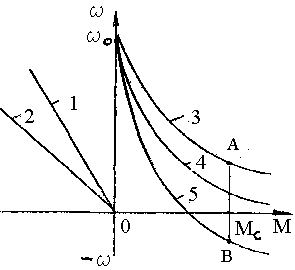
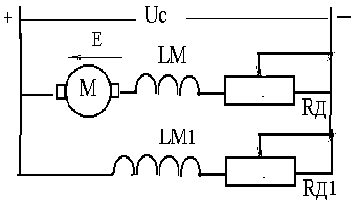
а) б)
Рис. 3.28 Схема и механические характеристики
ДПТ СВ
61
Пусковые и перегрузочные способности близки к ДПТ последовательного возбуждения. Тормозные режимы аналогичны
двигателям постоянного тока с независимым возбуждением.
Но есть одна особенность: при рекуперативном и динамическом торможении с целью предотвращения размагничивания машины обмотку последовательного возбуждения шунтируют.