

4.2. Уравнение прямой
Линию в пространстве можно рассматривать как пересечение двух поверхностей и определять заданием двух уравнений. В частности, каждую прямую линию можно рассматривать как пересечение двух плоскостей и соответственно этому определять заданием двух уравнений первой степени.
Пусть заданы некоторая прямоугольная система координат Oxyz и произвольная прямая L. Обозначим через 1 и 2 две различные плоскости, пересекающиеся по прямой L, заданные соответственно уравнениями
A1 x + B1 y + C1 z + D1 = 0, A2 x + B2 y + C2 z + D2 = 0 . (1)
Два уравнения вида (1) совместно определяют прямую L в том и только в том случае, когда плоскости 1 и 2 не параллельны и не совпадают друг с другом, т.е. нормальные векторы этих плоскостей = {А1; В1; С1} и = {А2; В2; С2} не коллинеарны (коэффициенты А1; В1; С1 не пропорциональны коэффициентам А2; В2; С2).
Уравнения (1) называются общими уравнениями прямой.
1. Канонические уравнения прямой. Для решения задач уравнения (1) не всегда удобны, поэтому используют специальный вид уравнений прямой.
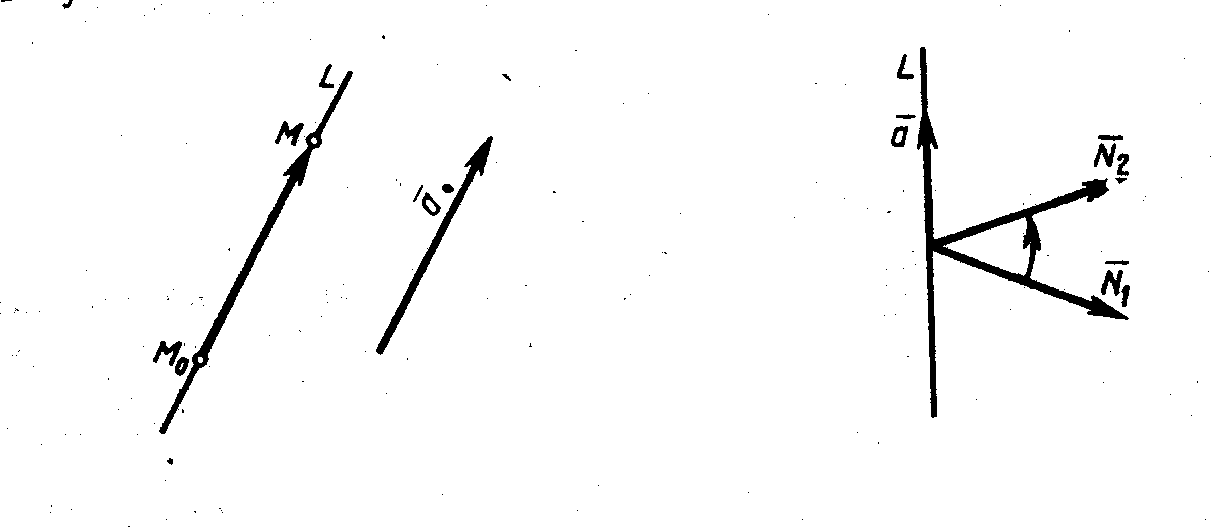
Пусть дана
какая-нибудь
прямая L
и ненулевой вектор
![]() ,
лежащий на данной прямой или параллельный
ей (рис. 32). Вектор
называется
направляющим
вектором
данной прямой. Выведем уравнение прямой,
проходящей через данную точку М0(x0;
y0;
z0)
и имеющей данный направляющий вектор.
,
лежащий на данной прямой или параллельный
ей (рис. 32). Вектор
называется
направляющим
вектором
данной прямой. Выведем уравнение прямой,
проходящей через данную точку М0(x0;
y0;
z0)
и имеющей данный направляющий вектор.
Пусть М(x; y; z) – произвольная точка. Она лежит на прямой тогда и только тогда, когда вектор = {x – x0; y – y0; z – z0} коллинеарен направляющему вектору = {l; m; n}, т.е. когда координаты вектора пропорциональны координатам вектора :
![]() .
(2)
.
(2)
Рис. 32 Рис. 33
Уравнения (2) и является искомыми. Они называются каноническими уравнениями прямой.
Для того чтобы составить канонические уравнения (2), если прямая L задана уравнениями (1), необходимо:
найти какую-нибудь точку М0(x0; y0; z0) L; для этого следует задать числовое значение одной из неизвестных координат x0, y0, z0 и подставить его вместо соответствующей переменной в уравнения (1), после этого две другие координаты определяются в результате совместного решения уравнений (1);
найти направляющий вектор = {l; m; n}. Так как прямая L определена пересечением плоскостей 1 и 2 , то она перпендикулярна каждому из нормальных векторов и (рис. 33). Поэтому в качестве вектора можно взять любой вектор, перпендикулярный векторам и , например их векторное произведение = . Так как координаты векторов и известны: = {А1; В1; С1} и = {А2; В2; С2}, то найдем координаты вектора :
![]() .
.
Пример 1. Найти канонические уравнения прямой
![]()
Р е ш е н и е. Полагая, например, х0 = 1, из системы
![]()
получаем y0 = 2, z0 = 1. Таким образом, точка М0(1; 2; 1) прямой найдена. Теперь определим направляющий вектор . Имеем: = {3; 2; 4} и = {2; 1; 3}, отсюда = = {10; 17; 1}, т.е. l = – 10 , m = 17, n = –1. Подставляя найденные значения х0 , y0 , z0 и l, m, n в равенства (2), получаем канонические уравнения данной прямой:
![]() .
.
2. Параметрические
уравнения прямой.
Иногда прямую полезно задавать не в
виде канонических уравнений (2), а иначе.
Пусть прямая L
задана уравнениями (2). Обозначим через
t каждое
из равных отношений. Тогда
![]() ,
откуда
,
откуда
x = x0 + lt, y = y0 + mt, z = z0 + nt. (3)
Равенства (3) называются параметрическими уравнениями прямой L, проходящей через точку М0(x0; y0; z0) и имеющей направляющий вектор = {l; m; n}. В уравнениях (3) t рассматривается как произвольно изменяющийся параметр ( t ); x, y, z – как функции от t. При изменении t величины x, y, z изменяются так, что, точка M(x; y; z) движется по данной прямой.
Параметрические уравнения удобны в тех случаях, когда требуется найти точку пересечения прямой с плоскостью. В самом деле, пусть непараллельные плоскость и прямая L заданы соответственно уравнениями
Ax +By + Cz + D = 0 и
x = x0 + lt, y = y0 + mt, z = z0 + nt.
Для
определения точки пересечения прямой
и плоскости подставим выражения для
x, y, z из
уравнений
прямой
L в уравнение
плоскости
.
В результате
преобразований получаем
![]() ,
причем знаменатель дроби не равен нулю,
так как плоскость не параллельна прямой.
Подставляя найденное значение t
в уравнения прямой, находим искомую
точку М(x;
y; z) пересечения
прямой L
с плоскостью .
,
причем знаменатель дроби не равен нулю,
так как плоскость не параллельна прямой.
Подставляя найденное значение t
в уравнения прямой, находим искомую
точку М(x;
y; z) пересечения
прямой L
с плоскостью .
3. Угол между прямыми. Рассмотрим две прямые L1 и L2, заданные соответственно уравнениями
![]()
При любом расположении
прямых L1
и L2
в пространстве
один из двух углов между ними равен углу
между их
направляющими векторами
![]() =
{l1;
m1;
n1}
и
=
{l1;
m1;
n1}
и
![]() ={l2;
m2;
n2},
а второй угол равен 180
. Угол
вычисляется по следующей формуле:
={l2;
m2;
n2},
а второй угол равен 180
. Угол
вычисляется по следующей формуле:
![]()