

План прискорень
Плани прискорень будують аналогічно планам швидкостей.
Планом прискорень будь-якого твердого тіла (ланки) називають геометричне місце кінців векторів прискорень крайніх його точок, відкладених з однієї довільної точки, що називається полюсом плану прискорень.
Теорема подібності для планів прискорень формулюється так.
План прискорень будь-якого тіла (ланки) подібний до тіла і повернутий відносно нього на деякий невизначений кут.
Розглянемо методику побудови планів прискорень на прикладі кривошипно-повзункового механізму (див. рис. 4.2). Вихідними даними для побудови плану прискорень є положення ланок механізму (план механізму) і план швидкостей. Рівняння, які використовуються при побудові плану прискорень, різняться тільки тим, що повні прискорення точки розкладають на певні складові. У даному випадку (рис. 4.3, а) повне прискорення точки А є геометричною сумою нормального (доцентрового) і дотичного (тангенціального) прискорень:
![]()
Нормальне
прискорення
![]() напрямлене по лінії АО
до центра обертання кривошипа О,
дотичне
– перпендикулярно до АО
і направлене в бік напрямку кутового
прискорення
напрямлене по лінії АО
до центра обертання кривошипа О,
дотичне
– перпендикулярно до АО
і направлене в бік напрямку кутового
прискорення
![]() ланки 1.
Модулі цих прискорень находять із
співвідношень
ланки 1.
Модулі цих прискорень находять із
співвідношень
![]()
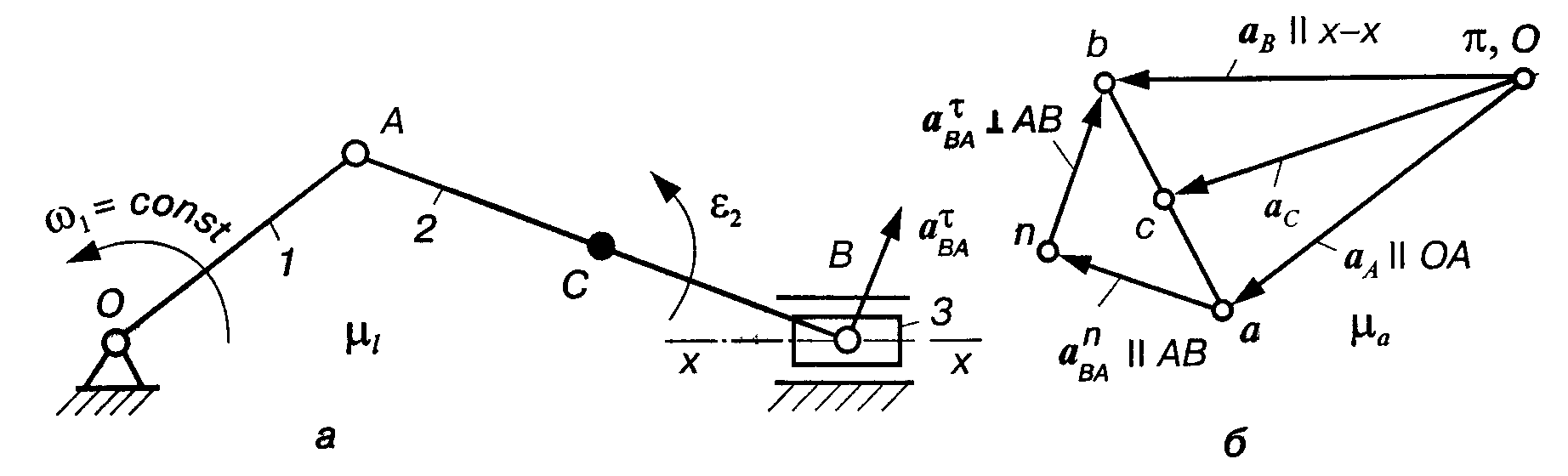
Рис. 4.3
Якщо
початкова ланка обертається рівномірно
(1=
соnst),
то
![]() ,
а отже, у даному випадку
,
а отже, у даному випадку
![]() тобто прискорення точки
тобто прискорення точки
![]() .
.
Прийнявши деяку точку ті за полюс плану прискорень (рис. 4.3,б), відкладемо вектор, який зображує нормальне прискорення точки А, у вигляді відрізка а. Тоді масштаб (масштабний коефіцієнт) прискорень знайдемо зі співвідношення
![]()
Прискорення точки В знайдемо з рівняння, аналогічного рівнянню (4.3):
aB = aA+aBA (4.4)
де
вектор прискорення aB
направлений уздовж напрямної х—х.
Розкладаємо
відносне прискорення aBA
на дві складові:
![]()
Тоді рівняння (4.4) запишемо у вигляді
![]() (4.5)
(4.5)
Вектор
нормального прискорення
![]() направлений уздовж лінії ВА
від точки В
до А,
а його модуль
направлений уздовж лінії ВА
від точки В
до А,
а його модуль
![]()
На
плані прискорень
зображено відрізком ап=
/a,
який прикладено своїм початком у точку
а
(згідно з правилом складання векторів).
Через його кінець (точку п)
проведено лінію дотичного прискорення
![]() з направленого перпендикулярно до
лінії АВ
з направленого перпендикулярно до
лінії АВ![]() ,
потім через полюс
—
напрямок прискорення точки В
(|| х—х).
Тоді точка перетину напрямків прискорень
аB
i
визначить точку b
—
кінець векторів аB
і
.
З'єднавши точки а
і b,
знайдемо вектор повного прискорення
,
потім через полюс
—
напрямок прискорення точки В
(|| х—х).
Тоді точка перетину напрямків прискорень
аB
i
визначить точку b
—
кінець векторів аB
і
.
З'єднавши точки а
і b,
знайдемо вектор повного прискорення
![]() і тим самим побудуємо план прискорень
шатуна АВ.
і тим самим побудуємо план прискорень
шатуна АВ.
Положення
точки с
на плані прискорень можна визначити
методом подібності, склавши пропорцію
(![]() ),
з якої можна визначити відрізок ас.
Тоді прискорення точки С
становить аC
= (с)a.
),
з якої можна визначити відрізок ас.
Тоді прискорення точки С
становить аC
= (с)a.
Модуль
кутового прискорення ланки 2
![]() . Для визначення напрямку
. Для визначення напрямку
![]() перенесемо вектор дотичного прискорення
у точку В
(рис. 3.11, а)
і спостерігатимемо, в який бік цей
вектор буде обертати шатун АВ
відносно вибраного полюса (точка А).
У
нашому випадку кутове прискорення
направлене проти руху годинникової
стрілки. Отже, рух шатуна АВ
в цьому положенні сповільнений, оскільки
кутова швидкість
перенесемо вектор дотичного прискорення
у точку В
(рис. 3.11, а)
і спостерігатимемо, в який бік цей
вектор буде обертати шатун АВ
відносно вибраного полюса (точка А).
У
нашому випадку кутове прискорення
направлене проти руху годинникової
стрілки. Отже, рух шатуна АВ
в цьому положенні сповільнений, оскільки
кутова швидкість
![]() має інший напрямок (див.
рис. 4.2,а).
має інший напрямок (див.
рис. 4.2,а).
Лекція 5
ПРИКЛАДИ ПОБУДОВИ ПЛАНІВ ШВИДКОСТЕЙ
І ПРИСКОРЕНЬ МЕХАНІЗМІВ II КЛАСУ
ПЛАНИ ШВИДКОСТЕЙ І ПРИСКОРЕНЬ ШАРНІРНОГО
ЧОТИРИЛАНКОВОГО МЕХАНІЗМУ
Як і для кривошипно-повзункового механізму, повинні бути задані кінематична схема механізму (рис. 5.1,а) і закон руху початкової ланки — кривошипа 1 (1= соnst).
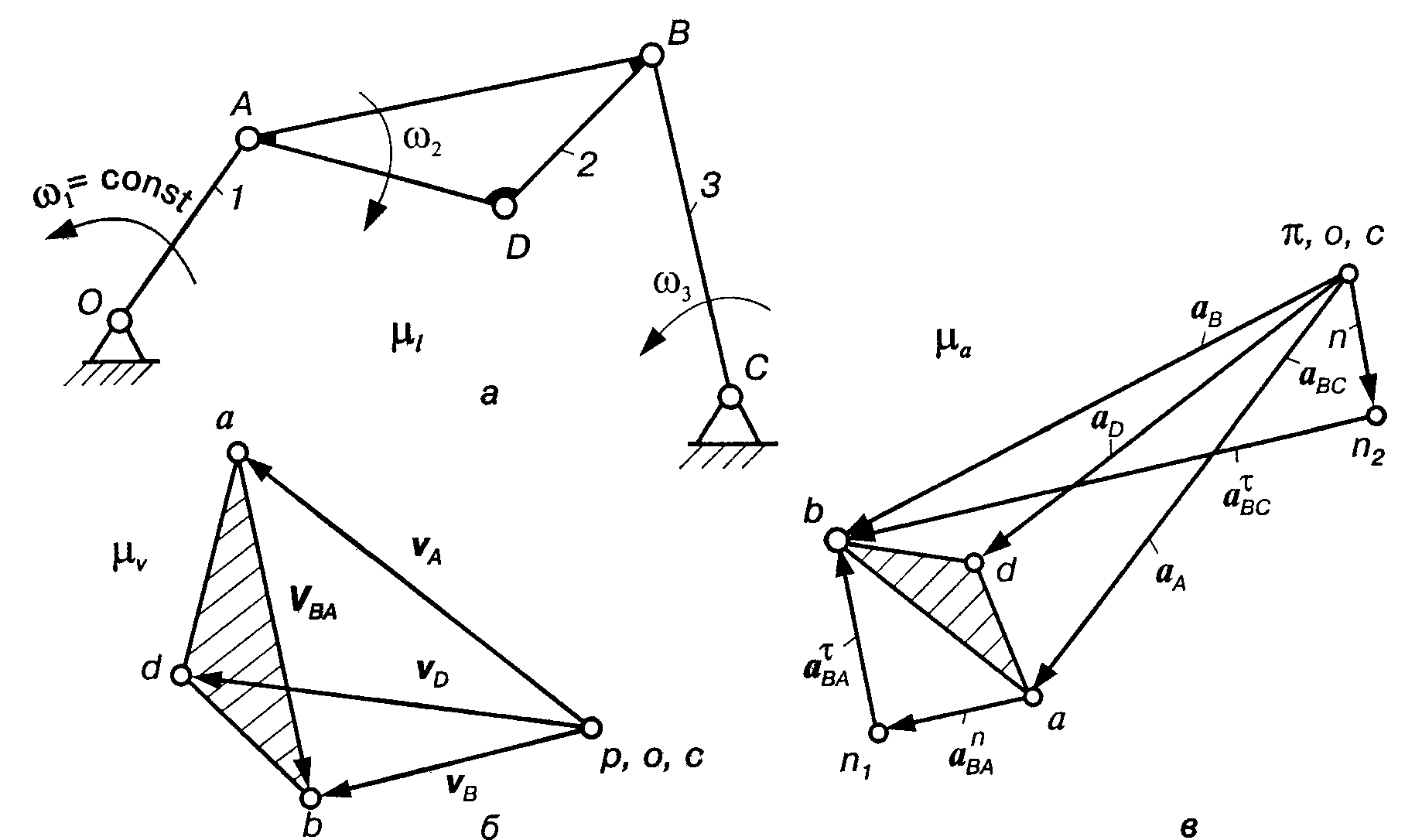
Рис. 5.1
Визначимо модуль швидкості точки А (VA=1lOA) відкладемо вектор цієї швидкості у масштабі V(VAOA), попередньо вибравши відрізок ра. Масштаб плану швидкостей одержимо за відомою формулою:
![]()
Для визначення швидкості точки В, яка одночасно належить ланкам 2 і 3, складемо векторні рівняння:
VB = VA+ VBA; VB = VC +VBC. (5.1)
За першим рівнянням (5.1) через кінець вектора VA (точка а) , проведемо лінію відносної швидкості VBA точки В відносно точки А (VBAАВ), а через точку р — лінію відносної швидкості VBC В відносно точки С (VBCВC). Точка С як нерухома (VBC = 0) потрапляє у полюс плану швидкостей, там знаходиться і точка О (VO=0). Точка перетину ліній-напрямків швидкостей VBA і VBC= VB визначає точку b, а отже, і величину цих векторів у масштабі V:
VBA=(ab)V, VB=(pb)V.
Швидкість точки D, що належить ланці 2, можна визначити за допомогою теореми подібності для плану швидкостей, згідно з якою можна записати такі пропорції:
![]() (5.2)
(5.2)
З цих пропорцій знайдемо відрізки:
![]()
за
допомогою яких побудуємо![]() ,
подібний до
,
подібний до
![]() .
З'єднавши
точку d
з полюсом р,
отримаємо швидкість точки D:VD=(pd)V.
Її можна визначити також методом
векторних рівнянь, розглянувши швидкість
точки D
через швидкості точок А
і В,
тобто записавши рівняння
.
З'єднавши
точку d
з полюсом р,
отримаємо швидкість точки D:VD=(pd)V.
Її можна визначити також методом
векторних рівнянь, розглянувши швидкість
точки D
через швидкості точок А
і В,
тобто записавши рівняння
VD= VA+ VDA; VD= VB+ VDB,
де VDA DA; VDB DB.
Кутові швидкості ланок 2 і 3 знайдемо, використавши відносні швидкості VBA i VBC:
2= VBA/lAB; 3= VBC/lBC= VB/lBC.
Щоб встановити напрямок кутової швидкості 2, перенесемо вектор VBA y точку В і розглянемо рух ланки 2 відносно точки А; для кутової швидкості 3 перенесемо вектор VBC також у точку В і розглянемо рух ланки 3 відносно точки С. У даному випадку 2 напрямлена за рухом годинникової стрілки, 3 — проти руху годинникової стрілки.
Побудову
плану прискорень цього механізму також
розпочнемо з ланки 1.
Прискорення точки А
при 1
= const
визначимо за формулою нормального
прискорення
![]() .
.
Вибравши полюс плану прискорень (рис. 5.1,в), відкладемо від нього відрізок па, який відповідає прискоренню точки А у масштабі a . Прискорення точки А спрямоване по лінії АО від точки А до точки О.
Для знаходження прискорення точки В складемо два векторні рівняння:
![]() (5.3)
(5.3)
Згідно
з першим рівнянням системи (5.3) кінець
першого вектора
аA
повинен збігатися з початком вектора
нормального прискорення точки В
відносно А,
величина якого визначається за формулою
![]() ,
або
,
або
![]() .
.
У
вибраному масштабі цей вектор буде
зображено відрізком
![]() ,
мм. Прискорення
направлене вздовж осі ланки АВ
від точки В
до точки А.
Через точку п1
згідно з цим самим рівнянням необхідно
провести лінію-напрямок дотичного
прискорення
,
величина останнього невідома, відомий
лише його напрямок — перпендикулярний
до лінії АВ.
,
мм. Прискорення
направлене вздовж осі ланки АВ
від точки В
до точки А.
Через точку п1
згідно з цим самим рівнянням необхідно
провести лінію-напрямок дотичного
прискорення
,
величина останнього невідома, відомий
лише його напрямок — перпендикулярний
до лінії АВ.
Розглянемо
друге рівняння (5.3). Прискорення точки
С дорівнює нулю, тому точка с збігається
з полюсом плану. Прискорення
![]() направлене
від точки В
до точки С.
Відрізок
направлене
від точки В
до точки С.
Відрізок
![]() ,
який відповідає прискоренню
,
який відповідає прискоренню
![]() ,
на плані відкладаємо від точки .
Через точку n2
проведемо лінію-напрямок дотичного
прискорення
,
на плані відкладаємо від точки .
Через точку n2
проведемо лінію-напрямок дотичного
прискорення
![]() до
перетину з лінією-напрямком прискорення
до
перетину з лінією-напрямком прискорення![]() .
Точка перетину b
цих ліній визначить величину і напрямок
прискорення точки В
та величини дотичних прискорень (у
масштабі a).
.
Точка перетину b
цих ліній визначить величину і напрямок
прискорення точки В
та величини дотичних прискорень (у
масштабі a).
Прискорення точки D отримаємо методом подібності, побудувавши подібний до ланки АBD трикутник аbd. Відрізки аd і bd визначимо із пропорцій (5.2). Щоб знайти прискорення точки D, можна також записати векторні рівняння, виразивши прискорення точки D через прискорення точок А і В, тобто
![]() (5.4)
(5.4)
Плани прискорень на основі рівнянь (5.4) будуються так само, як і для точки В (5.3).
Модуль кутових прискорень ланок 2 і 3 знайдемо за формулами
![]()
Для
визначення напрямку
і
![]() перенесемо вектори
і
перенесемо вектори
і
![]() y точку В
і розглянемо, в який бік ці вектори
повертають ланки відповідно АВ
і ВС.
y точку В
і розглянемо, в який бік ці вектори
повертають ланки відповідно АВ
і ВС.