

Примечание:
1.![]() – большие постоянные времени,
соответственно, интегрирующего и
апериодических звеньев в объекте;
– большие постоянные времени,
соответственно, интегрирующего и
апериодических звеньев в объекте;
2.* — указанные в скобках типы регуляторов применяют, когда статическая ошибка с П - регулятором недопустимо велика;
3. ** — указанные в скобках методы оптимизации характеризуются более длительным временем, в течение которого устраняется отклонение регулируемой величины при возмущающих воздействиях (динамическая ошибка регулирования).
Таблица 2 Расчет параметров регуляторов
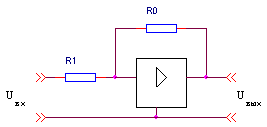
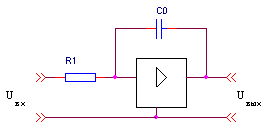
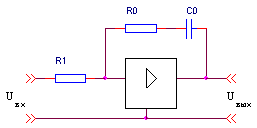
В качестве регуляторов применяют операционные усилители с входными цепями и цепями обратной связи. В зависимости от вида элементов этих цепей и способа их соединения, операционные усилители могут выполнять операции сложения, вычитания, пропорционального усиления, интегрирования, дифференцирования, а также любую комбинацию этих операций. В табл. 2, 3 представлены схемы и передаточные функции регуляторов различного типа.
Таблица 3 Параметры конструктивных элементов регуляторов
Тип регулятора |
Передаточная функция регулятора |
Схема регулятора |
Параметры регулятора |
П-регулятор |
|
|
|
И-регулятор |
|
|
|
Д-регулятор |
|
|
|
ПИ-регулятор |
|
|
|
16.4 Модальное управление в сау
Синтез систем управления на основе
частотных методов позволяет при заданной
структуре САУ выбрать ее параметры,
обеспечивающие требуемое качество
процесса регулирования. Такая задача
реализуема, если число регулируемых
параметров невелико – один или три.
Однако с помощью этих методов нельзя
придать корням замкнутой системы
желаемое расположение, обеспечивающее
необходимые ее динамические характеристики.
Помещение этих корней в любые наперед
заданные положения составляет предмет
теории модального управления. Если
вектор состояния объекта может быть
измерен полностью, то обеспечение
заданного расположения корней не
вызывает трудностей. Это достигается
в том случае, если матрица связи CY вектора
измеряемых переменных YY(t) и вектора
состояния управляемого объекта X(t) имеет
размерность
![]() ,
а ее ранг равен порядку системы
дифференциальных уравнений, описывающих
объект. При этом составляющими вектора
измеряемых переменных могут быть не
только измеряемые переменные состояния,
но и измеряемые линейные комбинации
этих переменных.
,
а ее ранг равен порядку системы
дифференциальных уравнений, описывающих
объект. При этом составляющими вектора
измеряемых переменных могут быть не
только измеряемые переменные состояния,
но и измеряемые линейные комбинации
этих переменных.
Если матрица CY имеет размерность
![]() (где
(где
![]() ),
а ее ранг равен r, то управляемый объект
относится к классу систем с неполной
информацией о переменных состояния,
так как в этом случае определить из
уравнения
),
а ее ранг равен r, то управляемый объект
относится к классу систем с неполной
информацией о переменных состояния,
так как в этом случае определить из
уравнения
![]() по
измеренному вектору
по
измеренному вектору
![]() все
компоненты вектора состояния X(t) не
представляется возможным.
все
компоненты вектора состояния X(t) не
представляется возможным.
При синтезе систем модального управления
используется метод стандартных
коэффициентов, при котором задается
оптимальное распределение корней.
Наиболее широко используется распределение
корней, предложенное Баттервортом. Оно
заключается в том, что корни
характеристического уравнения
распределяются в левой полуплоскости
по окружности радиуса
![]() ,
величина которого определяет быстродействие
системы. Стандартные формы Баттерворта
характеризуются симметричным
распределением коэффициентов
характеристического полинома системы.
Получаемые при использовании распределения
Баттерворта характеристические полиномы
приводят к некоторой колебательности
переходных характеристик. Наилучшие
результаты при использовании метода
стандартных коэффициентов достигаются
для систем, числитель передаточной
функции которых не содержит нулей.
Однако и при другом виде числителя эти
формы могут быть полезны, так как могут
служить отправной точкой при отыскании
оптимального распределения корней.
,
величина которого определяет быстродействие
системы. Стандартные формы Баттерворта
характеризуются симметричным
распределением коэффициентов
характеристического полинома системы.
Получаемые при использовании распределения
Баттерворта характеристические полиномы
приводят к некоторой колебательности
переходных характеристик. Наилучшие
результаты при использовании метода
стандартных коэффициентов достигаются
для систем, числитель передаточной
функции которых не содержит нулей.
Однако и при другом виде числителя эти
формы могут быть полезны, так как могут
служить отправной точкой при отыскании
оптимального распределения корней.
При управлении положением корней в случае полной информации о переменных состояния рассматривается линейный стационарный объект, описываемый уравнением вида
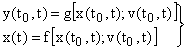 .
.
Рассмотрим замкнутую систему, то есть добавим к уравнению объекта уравнение регулятора вида:
|
(16.1) |
где Р – матрица обратных связей
размерностью
![]() .
.

Рисунок 16-5 Структурная схема САУ
Объединяя (16.1) и уравнение объекта, представленное в виде системы уравнений (16.2)
|
(16.2) |
получим
|
(16.3) |
Матрица обратных связей выбирается
таким образом, чтобы придать матрице
![]() заранее
предписанное расположение собственных
значений, то есть корней характеристического
уравнения матричного уравнения (16.3). В
том случае, когда машинный агрегат имеет
один входной сигнал, вместо вектора
заранее
предписанное расположение собственных
значений, то есть корней характеристического
уравнения матричного уравнения (16.3). В
том случае, когда машинный агрегат имеет
один входной сигнал, вместо вектора
![]() будет
фигурировать скалярная величина U, а
вместо матрицы
будет
фигурировать скалярная величина U, а
вместо матрицы
![]() размерностью
–
матрица-столбец b. В таком случае
прямоугольная матрица Р переходит в
матрицу-строку р, содержащую n элементов.
Структурная схема такой системы
представлена на рис. 16-3. Характеристическое
уравнение такой системы имеет вид:
размерностью
–
матрица-столбец b. В таком случае
прямоугольная матрица Р переходит в
матрицу-строку р, содержащую n элементов.
Структурная схема такой системы
представлена на рис. 16-3. Характеристическое
уравнение такой системы имеет вид:
![]() .
.
Приводя левую часть этого выражения к
общему знаменателю, обозначив получившийся
числитель через
![]() ,
получаем соотношение:
,
получаем соотношение:
|
(16.4) |
где
![]() —
скалярное произведение матрицы-столбца
числителя передаточной функции и
транспонированной матрицы-столбца
—
скалярное произведение матрицы-столбца
числителя передаточной функции и
транспонированной матрицы-столбца
![]() ,
характеризующей свойства цепи обратной
связи,
,
характеризующей свойства цепи обратной
связи,
– стандартная форма характеристического полинома для заданной размерности объекта управления.
Соотношение (16.4) позволяет достаточно просто находить структуру и параметры регулятора, обеспечивающего желаемое распределение корней замкнутой системы.
При неполной информации об управляемом объекте обратная связь формируется на базе матричного уравнения
![]() ,
,
где К – матрица-строка, содержащая r элементов.
Задача управления движением управляемого объекта решается аналогично рассмотренному выше случаю. Однако в последнем случае возможно управление распределением корней характеристического полинома системы лишь в определенных пределах. Чтобы получить большую свободу управления корнями в прикладных задачах, увеличивают число чувствительных элементов, устанавливаемых на объекте, то есть формируют выходной вектор, дающий более полную информацию о переменных состояния управляемой системы.