

5.2Усилительные устройства
Усилительные устройства служат для усиления сигнала рассогласования по мощности или напряжения до величины, необходимой для управления исполнительными устройствами.
Требования к усилителям:
минимальная постоянная времени T=RC;
линейность амплитудной характеристики;
малая зона нечувствительности.
Если для управления исполнительным устройством необходим сигнал переменного тока, а измерительное устройство работает на постоянном токе, то в усилительное устройство включается модулятор.
Полупроводниковые усилители.
Полупроводниковые усилители перспективны в мало мощных системах (рис 5.5).
Особенности:
малые габариты и масса;
хорошая экономичность;
большая надежность;
малая постоянная времени.
Недостаток: температурная нестабильность параметров.
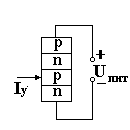
Рисунок 5‑17 Полупроводниковые усилители
Тиристорные усилители
Тиристор - управляемый полупроводниковый вентиль, имеющий четырехслойную структуру (p-n-p-n) . Тиристоры пропускают ток в прямом направлении при подаче на него управляющего напряжения и не пропускают ни в прямом, не в обратном направлении при отсутствии управляющего сигнала.
Тиристорный преобразователь используют в качестве усилителя мощности (рис 5.6).
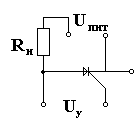
Рисунок 5‑18 Тиристорный усилитель мощности
Изменяя фазу регулирования, изменяют мощность на нагрузке.
Магнитные усилители
Магнитные усилители - это электромагнитные устройства, позволяющие получать значительные изменения мощности переменного тока посредством управления постоянным током малой мощности.
Принцип действия основан на нелинейном характере кривой намагничивания ферромагнитных материалов.
Магнитный усилитель
Обмотка управления - постоянный ток. Рабочая обмотка - переменный ток (рис 5.7).
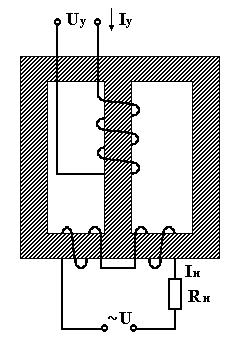
Рисунок 5‑19 Магнитный усилитель
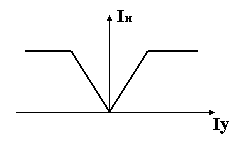
Рисунок 5‑20 Статическая характеристика
Постоянная времени магнитных усилителей
0,05![]() 0,1с.
0,1с.
Электромашинные усилители.
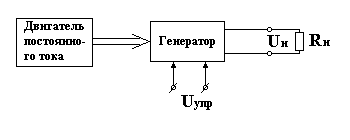
Рисунок 5‑21 ЭМ усилитель
ЭМ усилитель - это генератор постоянного тока, якорь которого вращается двигателем. Один из представителей ЭМ усилителей - генератор автомобиля. Входное напряжение поддерживается постоянным, независимо от оборотов двигателя с помощью обмотки возбуждения.
ЭМ усилители имеют высокий коэффициент усиления по мощности до 105. Характеристика линейна в широких пределах.
Недостатки:
большая инертность;
большая масса и габариты.
5.3Проектирование и теория управления производственными процессами
Автоматизация проектирования систем управления производством. Наметим основные задачи, возникающие при проектировании систем автоматизации производства.
Формулировка технического задания, в котором должно быть указано, какими процессами требуется управлять, каковы цели управления и в каких условиях должно осуществляться управление.
Выяснение возможности воздействия на управляемые процессы и прогноз внешних возмущений.
Оценка требуемой мощности исполнительных устройств, выбор типа ИУ и источников питания.
Оценка возможностей получения текущей информации и выбор датчиков.
Построение законов управления (правил преобразования информации).
Выбор типа преобразователя информации.
Программирование или схемная реализация блока преобразователя информации реализуют законы управления.
Подчеркнем, что в настоящее время проектирование самих технических средств и подчинение системы автоматизации все реже входят в непосредственный круг обязанностей инженера-проектировщика САУ. Обычно ориентируется на серийно выпускаемые промышленностью блоки. Главная же его работа состоит в обеспечении технических средств и подчинении системы автоматизации общим целям. При этом совершенно особую роль играет задача проектирования законов управления.
Общая теория управления может оперировать не с конкретными техническими описаниями типа автоматизации производственных процессов, а классами математических моделей. Это обстоятельство придает теории внешний облик математической дисциплины. Однако по своему содержанию и направленности теория автоматизации производственных процессов - техническая наука.
Техническое содержание проявляется при выборе типа изучаемых общих математических моделей, но главным образом - при приложении и трактовке математических результатов. При технических приложениях исходными являются не математические уравнения, а реальный объект и реально используемые технические средства.