

8.1Вопросы
Как выглядят передаточные функции для пропорциональных звеньев?
Как выглядят передаточные функции для дифференцирующих звеньев?
Как выглядят передаточные функции для интегрирующих звеньев?
Как выглядят передаточные функции для колебательных звеньев?
9Лекция №9 Устойчивость линейных стационарных систем
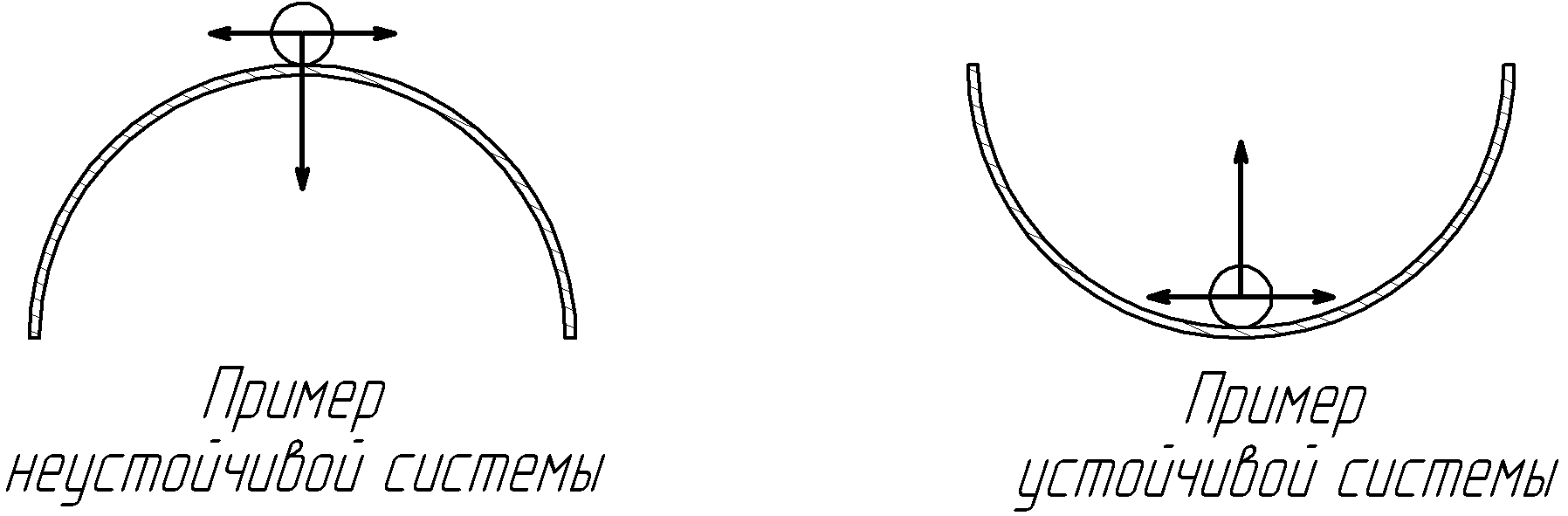
9.1Понятие устойчивости
Устойчивость является одним из основных требований, предъявляемых к системам автоматического управления (САУ). Неустойчивые САУ неработоспособны, поэтому важно уметь определять и соответствующий выбор структуры и параметры системы, обеспечить её устойчивость. В системе управления требуется поддерживать некоторое заданное движение, которое называется невозмущенным движением.
Вследствие различных возмущающих воздействий фактическое движение отличается от невозмущенного движения. В нормально функционирующей системе отклонение фактического движения от невозмущенного движения должно быть небольшим, а это возможно лишь в устойчивых системах.
9.2Устойчивость по входу
Звено называется устойчивым по входу
(осуществляющим устойчивое преобразование
вход-выход), если при любом ограниченном
входном воздействии x(t)
и нулевых начальных условиях, выходная
реакция y(t)
является ограниченной при любом конечном
![]() и при
и при
![]() и называется неустойчивым на входе в
противном случае.
и называется неустойчивым на входе в
противном случае.
Об устойчивости по входу можно судить
по свойствам весовой функции
![]()
Теорема 4.1 Для того, чтобы звено,
описываемое операторным уравнением,
было устойчиво по входу, необходимо и
достаточно выполнение условия
![]() .
.
Доказательство: известно, что вход и выход звена осуществляются по формуле.
![]()
Пусть x(t) – произвольно правильная функция, т.е. такая, что
![]()
Где С0 – некоторая константа. Тогда
![]()
9.3Характеристическое уравнение
Устойчивость линейной системы зависит от её характеристического уравнения.
![]()
Где дифференциальный параметр собственный
P рассматривается, как переменная. Левая часть характеристического уравнения называется характеристическим полиномом.
Характеристический полином системы совпадает с её собственным оператором или знаменателем передаточной функции.
9.4Необходимое и достаточное условие устойчивости
Для того чтобы линейная непрерывная
система была устойчива, необходимо и
достаточно, чтобы все корни её
характеристического уравнения
![]()
Или другая формулировка.
Для того чтобы линейная непрерывная система была устойчивой, необходимо и достаточно, чтобы все корни её характеристического уравнения были левыми, т.е. располагались в левой полуплоскости.
1)
 ;
;
![]()
2)

9.5Условие строгой реализуемости передаточной функции
Многочлен Q(P) (характеристический многочлен звена) не имеет других корней, кроме корней с отрицательными вещественными частями (условие устойчивости характеристического многочлена).
Пример.
Идеальный усилитель Q(P)=1 и корней нет.
Интегратор Q(P)=P и один вещественный корень
 система будет неустойчива.
система будет неустойчива.Апериодическое звено Q(P)=TP+1 и один вещественный корень
 при Т>0 система будет устойчива.
при Т>0 система будет устойчива.Колебательное звено
 и имеется два комплексно -сопряженных
корня,
и имеется два комплексно -сопряженных
корня,
 причем вещественная часть отрицательна
причем вещественная часть отрицательна
 система устойчива.
система устойчива.
Эти звенья являются устойчивыми по входу, за исключением интегратора. Переходная функция неограниченно растет, хотя является реакцией на единичное воздействие 1(t).