

4.4Устройства измерения параметров технологических процессов
Любая система автоматического управления, независимо от своего назначения, имеет устройство сравнения (различитель), без которого невозможно реализовать отрицательную обратную связь.
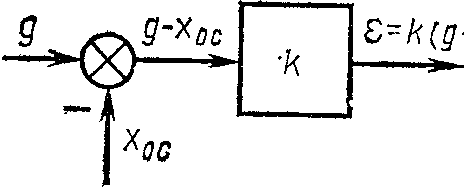
Рисунок 4‑10 Структурная схема устройства сравнения.
Устройство сравнения (вычитающее устройство) — это элемент, дающий сигнал ошибки на основании сравнения сигналов входного и обратной связи. Одновременно с операцией вычитания различитель может и усиливать сигнал. На структурных схемах он изображается так, как показано на Рисунок 4 -10 Структурная схема устройства сравнения.
На входы различителя поступает задающий сигнал g (t) и сигнал обратной связи xo.c (t), а на выходе формируется сигнал
(t) = g(t) – xo,c(t)],
где k—постоянный коэффициент преобразования.
В соответствии с функциями, которые выполняют устройства сравнения, их часто называют устройствами измерения.
К схемам устройств сравнения (различителя) предъявляются следующие требования:
1) высокая чувствительность, которая не должна зависеть от значения и закона изменения регулируемой величины;
2) высокая точность измерений;
3) малое потребление энергии (электроэнергии), в связи, с чем схема устройства сравнения электрической системы обычно имеет высокое входное сопротивление. Мощность выходного сигнала должна быть большой, т. е. устройство должно иметь высокий кпд;
4) быстродействие схемы должно обеспечивать хорошее слежение за изменением измеряемой величины;
5) зона нечувствительности схемы должна быть минимальной

Рисунок 4‑11 Четырех плечевая мостовая схема - мост Уилсона
В системах управления используются механические, электромеханические, и электрические устройства сравнения.
В качестве устройства сравнения часто применяются четырехплечие мосты (рис. 4.7). В три плеча этого моста включены известные сопротивления z1, z2, и z3, а в четвертое — сопротивление датчика zд. Сопротивления плеч моста могут быть активными и реактивными. Измерительные мосты работают как на постоянном, так и на переменном токе. Когда сопротивление датчика таково, что выполняется условие
zдz3=z1z2.
то потенциалы точек а и б равны и выходное напряжение равно нулю (Uвых=0). Условие zдz3=z1z2 является условием равновесия моста. Если регулируемая величина не равна заданной, то условие zдz3=z1z2 не выполняется и на выходе моста появляется напряжение Uвых, которое используется в системе для целей управления.
Чувствительность мостовой схемы по току
![]()
Где IH – ток нагрузки в ZД.
Чувствительность по напряжению
![]() (4.1)
(4.1)
Передаточная функция моста определяется характером сопротивлений плеч. В случае активных сопротивлений элемент сравнения считается безинерционным, т. е. его передаточная функция W (s) == k. В том случае, когда в системе автоматики информация передается путем изменения какого-либо из параметров электрического сигнала (уровня напряжения или тока, амплитуды, фазы или частоты гармонических колебаний), используется соответствующий тип различителя (различитель уровня, фазы или частоты).