

11.3 Интегральные показатели качества
Ошибку системы можно представить в виде суммы:
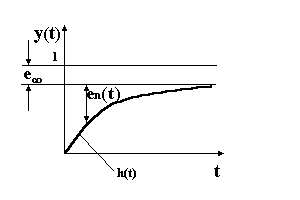
Рисунок 11‑37 Ошибка системы
![]() ,
,
где
![]() - установившаяся ошибка;
- установившаяся ошибка;
en(t) - переходная составляющая ошибки.
=1-h(t)
en(t)= h(![]() )
- h(t).
)
- h(t).
Если переходная характеристика является монотонной, то в качестве характеристики переходной составляющей ошибки может служить интеграл:
Чем меньше If , тем выше качество системы.
Если переходный процесс носит колебательный характер, то используют квадратичные интегральные оценки:
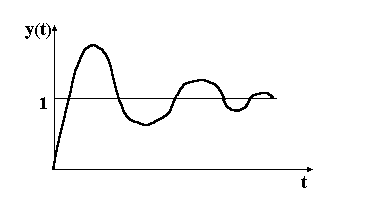
Рисунок 11‑38 Интегральные оценки
 ;
;
11.4Вопросы
В чем заключается задача анализа качества линейной стационарной САУ?
Что является показателями качества переходного процесса?
Как оценивается качество системы интегральными показателями качества?
Что называется показателем колебательности?
12Лекция №12 Анализ точности работы линейной системы автоматического управления
Динамическая точность работы систем
автоматического управления определяется
при медленно изменяющихся входных
сигнала (это воздействия, число производных
от которых ограничено). Сигнал
![]() относится к медленно изменяющемуся
воздействию, так как число производных
от этого сигнала не равных нулю, равно
k, а k+1
производная, равна нулю. Гармонический
сигнал не является медленно изменяющимся,
так как число производных от него равно
бесконечности.
относится к медленно изменяющемуся
воздействию, так как число производных
от этого сигнала не равных нулю, равно
k, а k+1
производная, равна нулю. Гармонический
сигнал не является медленно изменяющимся,
так как число производных от него равно
бесконечности.
Переходные процессы в системе при этом затухают значительно быстрее по сравнению с изменением медленно изменяющегося сигнала, поэтому и достигается установившийся режим работы системы.
Для ошибки системы по преобразованию Лапласа:
![]()
Передаточную функцию ошибки решим в виде степенного ряда по степени p
![]()
С другой стороны

Коэффициенты C называют коэффициентами ошибки. Приравняв оба выражения, выразим C через a и b.
где C0 - коэффициент ошибки по положению;
C1 - коэффициент ошибки по скорости;
C2 - коэффициент ошибки по ускорению.
Общая ошибка с учетом обратного преобразования Лапласа может быть решена как:
![]()
12.1Случайные процессы в линейных стационарных системах
Большинство, действующих на входе устройств и систем автоматического управления процессов являются случайными. Лишь при определенных допущениях их можно считать регулярными или детерминированными. Всякая автоматическая система работает в реальных условиях под действием случайных возмущений. И если в простейших системах управления случайные возмущения малы и не оказывают существенного влияния на работу системы, то в сложных системах случайное возмущение в значительной мере, а иногда и полностью, определяют весь процесс работы системы. Так например любая промышленная система управления работает не изолированно, а в соседстве с другими системами. Поэтому в элементах этой системы наводятся дополнительные электромагнитные поля и токи, являющиеся случайными возмущениями для данной системы. Такие внешние помехи существенно влияют на работу систем промышленной автоматики, особенно, если по соседству с ней имеются источники мощных электромагнитных полей. Также, в самих элементах любой автоматической системы всегда возникают посторонние, случайные колебания или флуктуации токов, вызываемые тепловым движением молекул в сопротивлениях и дискретным движением носителей заряда в полупроводниках.
Таким образом, случайные возмущения, действующие на систему автоматического управления, могут быть внешними и внутренними. Внешние случайные возмущения связанны со средой, в которой работает система. Они или действуют на объект управления, или поступают в систему через датчики информации как наиболее чувствительные элементы. Внутренние случайные воздействия свойственны и порождены самой системой.
Устранить влияние случайных возмущений на работу системы автоматического управления принципиально невозможно, так как они порождены теми самыми физическими явлениями, которые используются при разработке этих систем. При проектировании систем необходимо стремится к тому, чтобы свести к минимуму влияние этих случайных возмущений - помех и шумов.
Математический аппарат исследования прохождения побочных сигналов через звенья и системы автоматического управления основывается на теории вероятностей и теории случайных процессов.
Случайной функцией x(t) называется семейство случайных величин, зависимых от аргумента t. Если аргументом t является время, то говорят о случайном процессе.
Рассмотрим типовые случайные процессы.
1. Белый шум.
Под белым шумом понимают случайный процесс, имеющий одинаковое значение спектральной плотности на всех частотах.
![]() при -
+
при -
+
Корректирующая функция белого шума имеет вид:
![]()

Рисунок 12‑39 Корректирующая функция белого шума
Процесс, имеющий корреляционную функцию вида R(), является совершенно случайным процессом, так как при любом 0 отсутствует корреляция между последующими и предыдущими значениями случайной величины.
Процесс с такой спектральной плотностью является физический нереализуемым, так как ему соответствует бесконечно большая дисперсия, а следовательно, и бесконечно большая мощность.
2. Белый шум с ограниченной спектральной плотностью.
![]()
п - граничная частота полосы белого шума.
![]()
