

3.3Вопросы
В чем заключается решение задачи управления?
Что можно понимать под задачей регулирования?
Что называется управляющим органом?
Для чего служит исполнительное устройство?
4Лекция №4 Сведения о технических средствах автоматики
4.1Сравнение биологических и технических систем управления
Таблица 4‑1
№ |
Параметры сигналов |
Название Биологических систем |
Название Технических систем |
1 |
Получение сигналов |
Органы чувств |
Датчики |
2 |
Обработка сигнала |
Мозг, память |
ЭВМ (запоминающее устройство) |
3 |
Преобразование сигналов |
Органы движения, руки, ноги, язык |
Исполнительные устройства |

Рисунок 4‑3 Схема сравнения биологических и технических датчиков
Функциональные блоки управляющей подсистемы реализуются с помощью различных технических средств автоматики.
Элементами управляющей подсистемы являются:
1. Датчики информации;
2. Блок преобразования и хранения информации;
3. Исполнительное устройство.
Датчики информации являются преобразователями значений различных физических процессов в электрические сигналы;
Преобразование и хранение информации осуществляется с помощью электронно-вычислительных устройств аналогового или цифрового типа;
Исполнительное устройство управляется электрическими сигналами и их преобразует в сигналы другой физической природы.
Приведем некоторые примеры датчиков:
датчик относительного перемещения (измерительный потенциометр) U= f(x)
Напряжение U снимаемое движком потенциометра, пропорционально перемещению «х» движка относительно средней точки. Если движок связать с одним из тел, а корпус с другим, то получим датчик их относительного поступательного движения.
С помощью кругового потенциометра аналогичным образом можно получить электрический сигнал, пропорциональный относительному углу поворота.
Аналогичным образом реализуются датчики угловой скорости, температуры и др. О датчиках будут специальные лекции.
Преобразователи информации - они реализуются на ЭВМ.
4.2Исполнительные устройства
В исполнительных устройствах электрический сигнал преобразуется в механическое движение.
Пример: х=f(I)
Классификация технических систем управления.
По степени автоматизации функции управления делятся на:
- ручное управление - все функции управления выполняются человеком;
-автоматизированное -часть функций управления осуществляется человеком, а часть автоматическими устройствами;
-автоматическое - все функции выполняются автоматическими устройствами.
По степени сложности - на простые и сложные – (это условное разделение.)
По степени определенности выходных сигналов, возмущающих воздействий на объект и характеристик самого объекта:
- детерминированные: простые и сложные
- стохастические: простые и сложные.
- по типу объекта управления:
- механические;
-электротехнические;
-теплотехнические;
-химические.
Исполнительные устройства преобразуют управляющий сигнал в перемещение органа управления.
По характеру перемещения органа регулирования исполнительные устройства делятся на:
прямоходные;
поворотные.
По виду потребляемой энергии:
гидравлические;
пневматические;
электрические;
комбинированные.
Гидравлические исполнительные устройства являются наиболее надежными.
Электрические исполнительные устройства делятся на электромагнитные и электромашинные устройства.
Электромагнитные исполнительные устройства - реле, соленоиды, электромагнитные муфты.
Реле - это устройство, которое изменение электрической величины преобразует в механическое перемещение, размыкающее или замыкающее контакты.
Соленоид - катушка, внутри которой расположен якорь, перемещающийся действием электромагнитного поля катушки (рис 5.9).
Электромагнитные муфты:
фрикционные - за счет трения;
порошковые - изменение вязкости ферромагнитного порошка;
скольжения - за счет связи через магнитное поле.

Рисунок 4‑4 Соленоид
Электромашинные исполнительные устройства - это двигатели различных типов. Делятся на:
двигатели постоянного тока;
двигатели переменного тока.
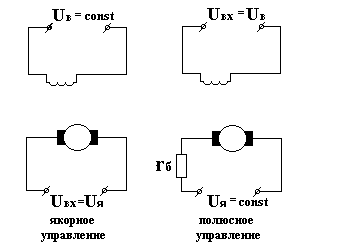
Рисунок 4‑5 Двигатели
Управление двигателем постоянного тока может быть со стороны якоря (якорное управление), и со стороны обмотки возбуждения (полюсное управление).
Полюсное управление позволяет уменьшить мощность исполнительного устройства.
Якорное управление имеет лучшее быстродействие.