

6.3Уравнения динамических систем
Уравнения динамических систем можно
записать в форме следующего полинома
относительно оператора
![]() и
и
![]() ,
а уравнение системы можно представить
,
а уравнение системы можно представить
![]() (6.7.)
(6.7.)
где![]() и
и
![]() параметры
уравнения,
параметры
уравнения,
![]() -
входное воздействие,
-
входное воздействие,
![]() -
реакция.
-
реакция.
При записи и преобразовании дифференциальных
уравнений оператор p
можно рассматривать как алгебраический
сомножитель, а выражение py
- как произведение, не обладающее
свойством коммутативности, то есть
писать,
![]() учитывая это, преобразуем последнее
уравнение
учитывая это, преобразуем последнее
уравнение
![]()
![]() (6.8.)
(6.8.)
введем
![]()
![]() (6.9.)
(6.9.)
и представим уравнение (6.8) в более компактной форме
![]() (6.10.)
(6.10.)
где ![]() -
собственный оператор;
-
собственный оператор;
![]() -
оператор воздействия.
-
оператор воздействия.
Дифференциальный оператор
![]() при
выходной величине называют собственным
оператором, а дифференциальный оператор
при
выходной величине называют собственным
оператором, а дифференциальный оператор
![]() при
входной величине оператором взаимодействия.
Все уравнения, записанные с использованием
оператора p,
являются символической формой записи
уравнения (6.7). Такая запись удобна при
определении передаточных функций.
при
входной величине оператором взаимодействия.
Все уравнения, записанные с использованием
оператора p,
являются символической формой записи
уравнения (6.7). Такая запись удобна при
определении передаточных функций.
6.4Передаточные функции
Для описания САУ используются две различные передаточные функции - в операторной форме и в изображении Лапласа.
Передаточная функция в операторной форме W(p) называется отношением оператора воздействия к собственному оператору.
![]() ;
;
![]()
Периодической функцией в изображениях Лапласа W(s) называется отношение изображений Лапласа выходной величины к входной при нулевых начальных условиях. Здесь s - переменная преобразования Лапласа.
Согласно определению, передаточная функция в операторной форме:
 (6.11.)
(6.11.)
Используя W(p), получим уравнение
![]() ,
(6.12.)
,
(6.12.)
которое является разновидностью символической записи уравнения (3.7).
Чтобы определить передаточную функцию в изображениях Лапласа, произведем преобразование Лапласа при нулевых начальных условиях
![]() ;
;
![]() (6.13.)
(6.13.)
Т.к. преобразованием по Лапласу называется функция
![]() (6.14.)
(6.14.)
Поэтому с учетом (6.14)
![]() ,
,
где
![]() .
.
Тогда по определению передаточная функция в изображениях Лапласа
 ;
(6.15.)
;
(6.15.)
Поэтому уравнение в изображениях Лапласа приобретает вид
![]() (6.16.)
(6.16.)
Операторная функция W(s)
получается из передаточной функции
операторной формы W(p)
формальной подстановкой p=
s;
![]() .
.
Такая связь между двумя формами передаточных функций справедлива только для стационарных систем.
Передаточные функции для ошибки по воздействию.
При исследовании точности замкнутых автоматических систем управления, разработчиков интересует зависимость ошибки e(t) от задающего воздействия g(t).
Эта зависимость определяется передаточной функцией для ошибки по задающему воздействию, которую обозначаем He(p). Если передаточная функция He(p) известна, то тогда:
E(p)= He(p)![]() G(p)
(6.17)
G(p)
(6.17)
Чтобы найти эту передаточную функцию по заданной структурной схеме автоматической системы, целесообразно выразить ее через передаточную функцию замкнутой системы Wз(p) или через передаточную функцию разомкнутой системы Wp(p):
He(p)=![]()
Wз(p)=![]() (6.18)
(6.18)
He(p)=1-
=![]()
После того как передаточная функция Не(р) найдена, ошибка замкнутой автоматической системы управления для задающего воздействия g(t), может быть определена путем обратного преобразования Лапласа, т.е:
e(t)=L-1[E(p)]=L-1[He(p)![]() G(p)].
(6.19)
G(p)].
(6.19)
Передаточная функция для ошибки по помехе.
Системы автоматического управления
работают, как правило, в условиях помех.
При этом задающее воздействие g(t) всегда
приложено к входу системы, а помеха V(t)
может быть приложена в произвольной
точке системы, как показано на рисунке
6.3. Разомкнутый контур разделен на две
части. W1(p)- не подвержена воздействию
помех, а на входе второй W2(p)
действует помеха V(t). При этом
W(p)=W1(p)![]() W2(p).
W2(p).
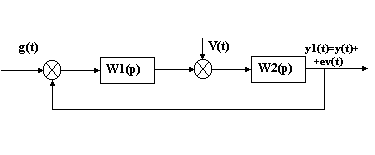
Рисунок 6‑24 Приложение воздействий на САУ
Выходная величина САУ может быть представлена в виде:
y1(t)=y(t)+ev(t), (6.20)
где y(t)=Wз(p) g(t) - реакция системы на задающее воздействие.
Ev(t)=![]() (6.21)
(6.21)
Составляющая ev(t) выходной величины y1(t) искажает значение управляемой величины y(t), т.е. является ошибкой системы, обусловленной помехой V(t).
Отношение изображения Ev(p) этой ошибки к изображению помехи V(p) определяет передаточную функцию системы автоматического управления для ошибки по помехе:
Hev(p) =![]() (6.22)
(6.22)
Если помеха действует на входе системы, то получаем:
Hev(p)=
![]() =Wз (6.23)
=Wз (6.23)