

5.4Вопросы
Что называют вторичными приборами?
Считаются ли миллиамперметры вторичными приборами?
Как можно классифицировать усилительные устройства?
Для чего служат усилительные устройства?
В чем состоит принцип работы электромашинного усилителя?
Какие основные задачи возникают при решении задачи систем автоматизации производства?
6Лекция №6 Математическое описание линейных систем автоматического управления
Объекты и системы управления технологическими процессами состоят из элементов, имеющих различную природу. Описание каждого элемента дается на языке механики, электротехники, химических или физических процессов. Для анализа взаимодействия удобно перейти к единообразному описанию. В инженерной практике получил наибольшее распространение следующий способ:
а) каждый реальный элемент рассматривается как устройство, звено системы, в котором осуществляется преобразование одного процесса, называемого входным воздействием, в другой, называемой входной реакцией, или просто преобразование "вход - выход".
б) взаимодействие между звеньями задаются путем описания связи между их входами и выходами, определяющих структуру схемы.
Математическое описание вход - выходных соотношений может быть аналитическим (с помощью уравнений), графическим (с помощью графиков, структурных схем, графов) и табличным (с помощью таблиц).
Математическое описание можно получить аналитическим на основе физических и химических законов, которым подчиняются технологические процессы, или экспериментально.
Обычно вход - выходные соотношения описываются линейными или нелинейными алгебраическими или дифференциальными уравнениями, передаточными функциями или импульсными функциями.
6.1Классификация систем
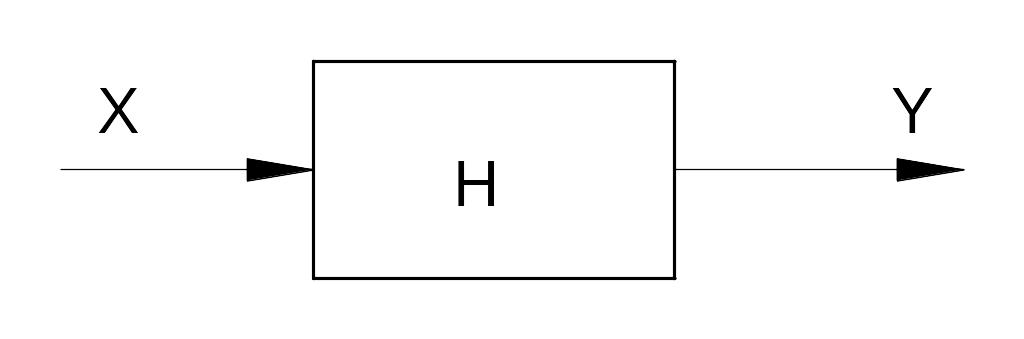
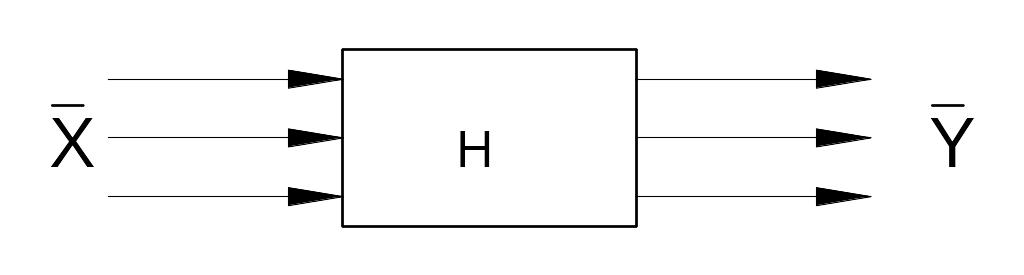
Различают одномерные системы, имеющие один вход и один выход, и многомерные системы с несколькими входами и выходами (Рис 6.1 рис 6.2).
![]()
Рисунок 6‑22 Одномерная система Рисунок 6‑23 Многомерная система
Автоматическая система, как правило, является динамической, то есть процессы в ней протекают во времени. Динамическая система характеризуется определенным оператором. Под оператором понимают математические действия: алгебраические операции, дифференцирование, интегрирование, решение интегральных и дифференциальных уравнений, других функциональных уравнений, а также другие логические операции. Поэтому вход и выход связаны в общем случае
![]() (6.1.)
(6.1.)
где H - оператор системы.
6.2Принцип суперпозиции
Оператор H называется линейным, если при любых числах C1 ,..,Cn и любых функциях x(t),..,xn(t) выполняется равенство:
 (6.2.).
(6.2.).
Свойство, выраженное формулой (6.2) называется принципом суперпозиции и состоит в том, что результат действия линейного оператора на линейную комбинацию заданных функций является линейной комбинацией от результатов его действия на каждую функцию в отдельности с теми же коэффициентами.
Примерами линейных операторов является оператор дифференцирования
![]()
![]() (6.3.)
(6.3.)
и интегрирующий оператор общего вида
 (6.4.)
(6.4.)
где
![]() -
некоторые известные функции.
-
некоторые известные функции.
Оператор H называется нелинейным, если для него не выполняются принцип суперпозиции
![]()
![]() (6.5.)
(6.5.)
и интегрирование нелинейной функции
![]() (6.6.)
(6.6.)
где
![]() -
нелинейная функция.
-
нелинейная функция.
Стационарные и нестационарные системы
Оператор системы может быть стационарным и нестационарным. В первом случае свойства оператора не зависят от времени, во втором случае он может менять во времени свои свойства и структуру. Если оператор системы стационарен, то такая система называется стационарной. Если динамическая система описывается уравнением, то характерным признаком стационарности системы является постоянство всех параметров (коэффициентов) уравнения. В противном случае система является нестационарной.
Системы уравнения и их операторы могут быть непрерывными и дискретными - эти системы могут быть линейными и нелинейными.
Большинство систем в целом можно отнести к системам сосредоточенными или распределенными параметрами.