

10.5Вопросы
Какие критерии устойчивости называются частотными?
Какое звено является устойчивым по входу?
Какой будет устойчивость звеньев соединенных последовательно?
Что называется кривой Михайлова?
В чем суть критерия Найквиста?
Где применяется критерий Найквиста?
11Лекция №11 Основы анализа качества линейных стационарных сау
11.1Постановка задачи
При анализе качества работы систем автоматического управления предполагают, что структурная схема, параметры системы известны. Необходимо оценить качество ее работы.
Кроме устойчивости (которая рассматривалась на предыдущих лекциях) системы автоматического управления оцениваются:
точностью работы;
характером переходного процесса;
частотными свойствами.
Качество работы системы зависит не только от ее характеристик, но и от вида, действующего на эту систему сигналов.
На систему автоматического управления, кроме полезных сигналов, действуют возмущающие воздействия (или помехи).
Помехи снижают точность работы системы.
Законы изменения управляющих воздействий и помех обычно заранее неизвестны, поэтому качество работы системы определяется по косвенным признакам. Они называются показателями качества работы системы.
Статистические ошибки системы оцениваются по реакции системы на скачкообразный процесс.
Динамические ошибки системы оцениваются при управляющем воздействии типа:
Отклик системы на гармоническое воздействие определяет частные показатели качества.
Относительно случайных сигналов и помех качество работы системы характеризуется суммарной средней квадратичной ошибкой.
![]()
где G2e - дисперсия ошибки;
me - математическое ожидание ошибки.
11.2Показатели качества переходного процесса
В системах автоматического управления технологическими процессами на переходе, на процессы, накладываются определенные ограничения, связанные с особенностями работы данной системы.
Например, в системах захвата и удержания заготовок не допускаются большие углы отклонения манипулятора от установившегося значения для повышения надежности работы механических узлов.
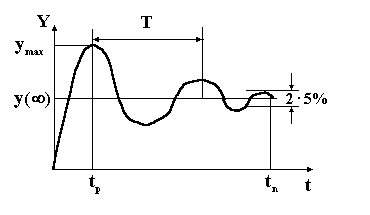
Рисунок 11‑35 Основные показатели качества переходного процесса
1. Длительность переходного процесса tn . С момента передачи сигнала до момента времени, когда выходной сигнал не будет отличаться от установившегося значения не более чем на 5%.
2. Перерегулирование равно отношению максимального значения выходного сигнала в переходном процессе к установившемуся значению.
![]()
3.Время установления первого максимума выходного сигнала tp .
Оно характеризует скорость изменения выходного сигнала в переходном процессе.
4.Частота колебаний в переходном процессе.
![]() T - период колебаний.
T - период колебаний.
В астатических системах значение выходного сигнала в установившемся режиме равно единице.
В статических системах выходной сигнал в установившемся режиме равен:
![]()
Если сигнал на входе системы отличается от единицы, то в переходном процессе изменяется только масштаб выходного сигнала.
Частотные показатели
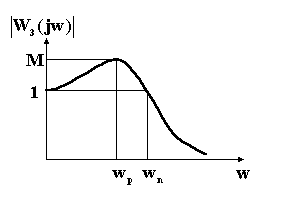
Частотные показатели качества работы систем автоматического управления определяются по АЧХ замкнутой системы.
![]() при w=0
при w=0
![]() для статических систем;
для статических систем;
![]() для астатических систем.
для астатических систем.
1. Полоса пропускания wn - диапазон частот, в котором АЧХ больше или равен единице, если АЧХ во всем диапазоне <1, то полоса пропускания по уровню 0.7 .
2. Резонансная частота wp - частота, соответствующая максимуму АЧХ замкнутой системы. Частота колебания в переходном процессе.
3. Показатель колебательности М -
максимальное значение АЧХ замкнутой
системы. Обычно добиваются, чтобы M![]() 2
.
2
.
Замкнутые и разомкнутые системы связаны соотношением:
![]() ,
,
где
![]() ;
;
![]() -
АЧХ и ФЧХ разомкнутой системы.
-
АЧХ и ФЧХ разомкнутой системы.
Обозначим:
Возведя в квадрат правую и левую части, и освободившись от знаменателя, получим:
(U+C)2+V2=R2; C=![]() ;
;
![]()
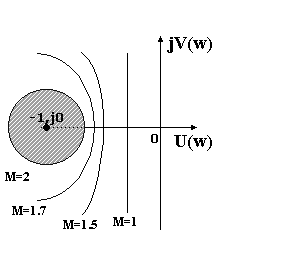
Рисунок 11‑36 Уравнение окружности
Это уравнение окружности (рисунок 11‑2) с радиусом R и центром в точке
(-C,0).
Задаваясь для M рядом значений, получим семейство окружностей.
Если при проектировании системы ставится условие, чтобы ее показатель колебательности не превышал некоторого значения Mmax , то необходимо, чтобы АФХ не заходила внутрь окружности соответствующей этому значению M. Т.е. эта область является запретной для АФХ разомкнутой системы по показателю колебательности M (у нее Mmax=2).