

Вопросы
Что является основной задачей автоматического управления?
Что называется объектом управления?
Что называется управляемой величиной?
Что называется управляющим органом?
Что называется чувствительным элементом?
Что называется управляющим воздействием?
Что называется возмущением?
Что называется управляющим устройством?
Что называется функциональной схемой и из чего она состоит?
В чем суть принципа обратной связи?
Какой частный случай управления называется регулированием?
В чем отличие систем прямого и непрямого регулирования?
Какую формулировку имеет задача управления?
3Лекция №3 Решение задачи управления
3.1Решение общей задачи управления
Решение задачи управления состоит в том, чтобы найти такие значения векторов состояния у (t) и управления U(t) ,при которых выполняется условие:
![]() (3.1)
(3.1)
На практике стремятся достичь того, чтобы модуль разности между достигнутым значением показателя цели управления j и значением J не превышал заранее заданной величины , т. е.
![]() (3.2)
(3.2)
Значение J отражает качество управления.
В зависимости от типа системы управления вектор состояния у (t) называют планом или программой управления, а вектор управления U (t) - управляющим воздействием или решением.
В несколько иной форме задачу управления
можно сформулировать следующим образом:
найти и реализовать функциональную
зависимость U(t)=U{y(t)},
обеспечивающую наилучшее приближение
к заданному значению критерия управления
![]()
Выражение U(t)=U{y(t)} называют алгоритмом управления.
Задача управления упрощается, если цель управления задается как вектор желаемого состояния y*(t) , т.е. считается, что план и программа управления известны, и могут быть сообщены системе заранее, тогда критерий управления можно представить функционалом:
![]() ,
(3.3)
,
(3.3)
где ошибка
![]() ,
a y(t) - вектор текущего состояния объекта
управления.
,
a y(t) - вектор текущего состояния объекта
управления.
Этот частный случай задачи управления называют задачей регулирования.
3.2Частные решения задачи управления
Полагая заданным y(t), найти закон регулирования:
![]() (3.4)
(3.4)
который обеспечивает экстремум критерия:
j=J{y*(t) - y(t)} (3.5)
В этом плане задача регулирования является частным случаем задачи управления.
Таким образом, процесс управления можно разбить на совокупность следующих функций:
планирование и определение программ управления;
контроль;
формирование управляющего воздействия или принятие решения;
реализация управляющего воздействия или решения.
Определение программы управления (планирования) заключается в выработке траектории движения системы y*(t) в пространстве параметров ее состояния. Контроль состоит в измерении компонентов вектора состояния y(t) и определении вектора ошибки (t). Формирование управляющего воздействия (принятие решений) заключается в определении значений управляемых переменных, приводящих объект управления в желаемое состояние.
Реализация управляющего воздействия - это непосредственное физическое воздействие на объект управления.
Рассмотрим варианты систем управления: Функциональная схема системы регулирования, представленная на рис 3.2 отличается от схемы системы управления, отсутствием программатора. Желаемое состояние объекта задается извне и называется обычно задающим воздействием. Рисунок 3.1 имеет программатор, определяющий программу или план; устройство сравнения, осуществляющее программу контроля; устройство формирования управляющего воздействия; исполнительный орган, реализующий управляющее воздействие; объект управления; датчик или первичный преобразователь, который преобразует информацию о векторе состояния на физический носитель - электрический сигнал.
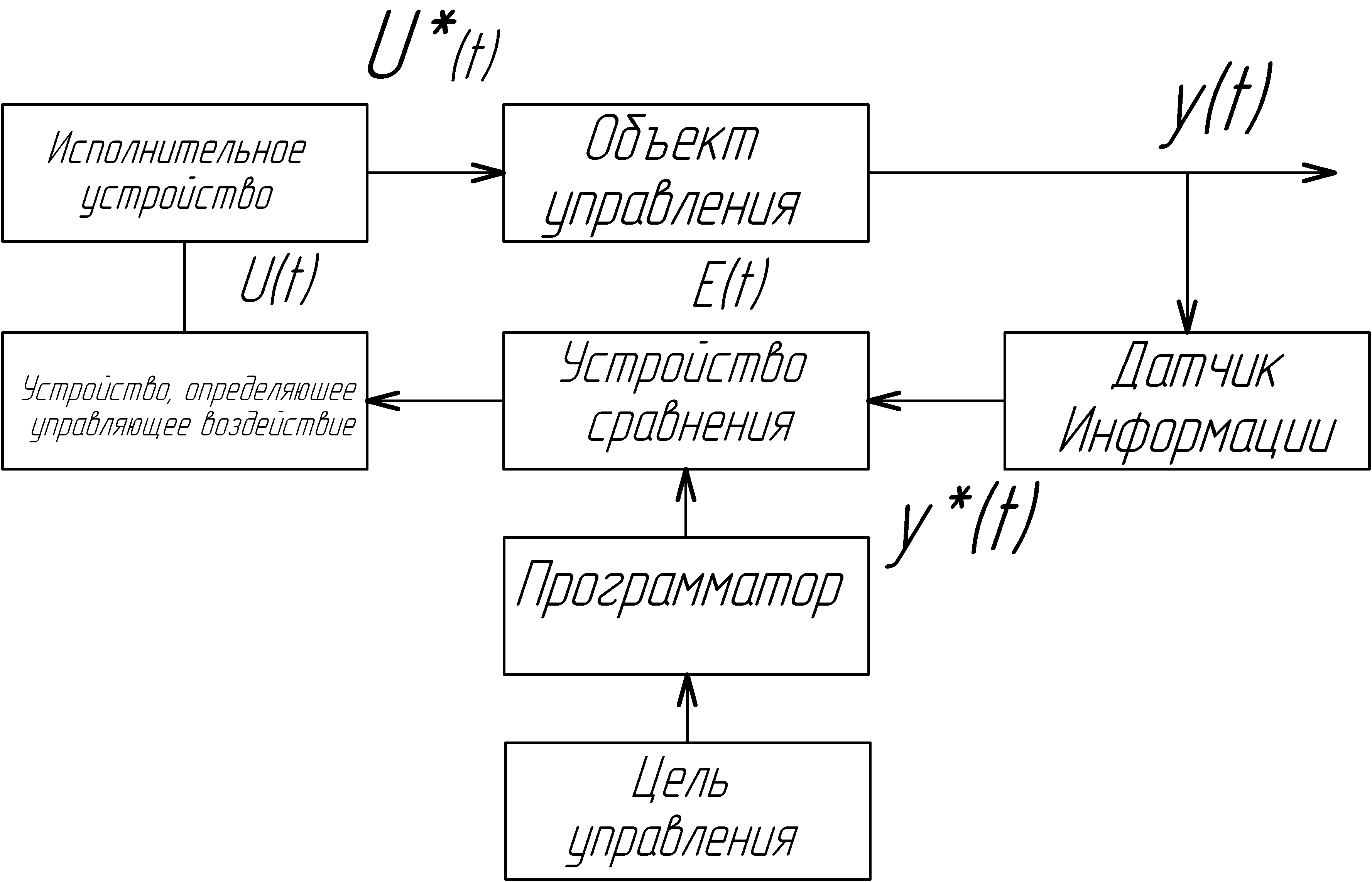
Рис.3.1 Функциональная схема системы управления
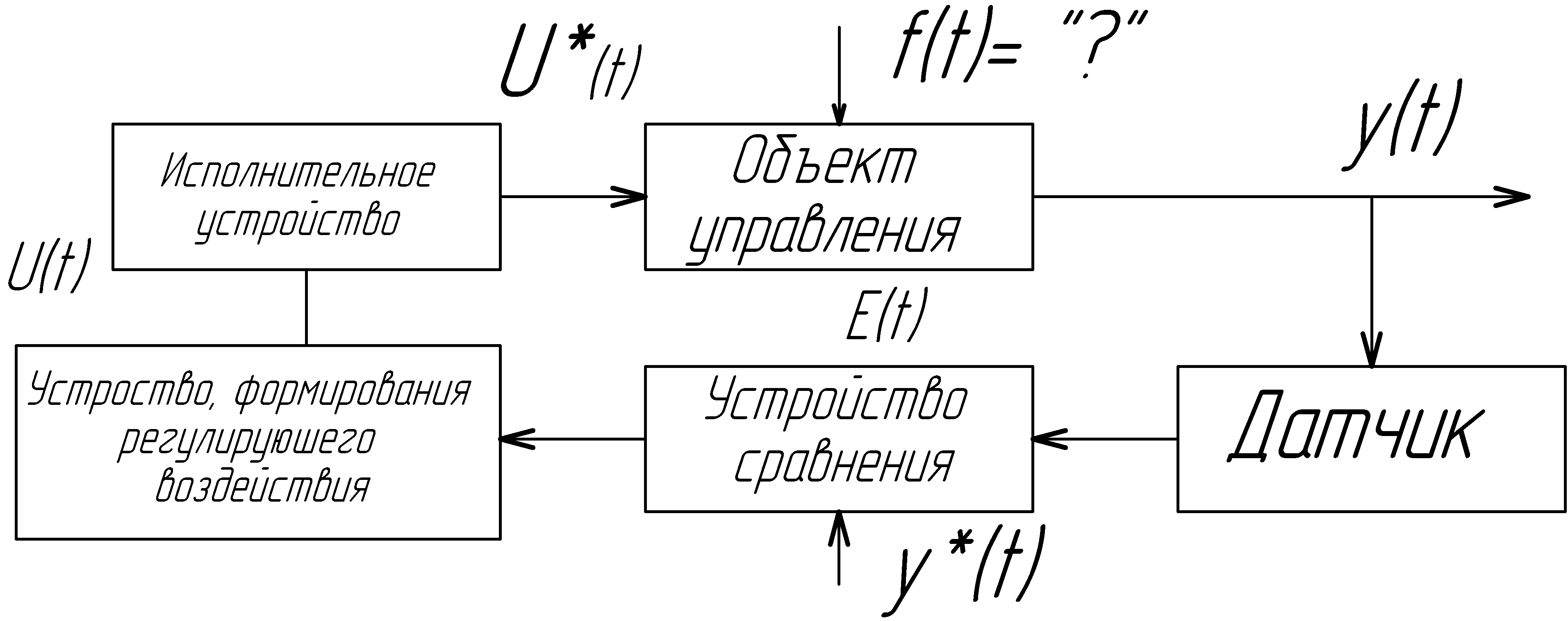
Рис.3.2 Функциональная схема системы регулирования
Таким образом, задачу регулирования можно рассматривать как частный случай задачи управления. Процесс управления можно условно разбить на совокупность следующих функций:
планирование или определение программы управления;
контроль;
формирование управляющего воздействия или принятие решения;
реализация управляющего воздействия или решения.
Определение программы управления (планирование) заключается в выработке траектории движения системы y*(t) в пространстве параметров ее состояния.
Контроль состоит в измерении значений
компонентов вектора состояния x(t) и
определении вектора ошибки
![]() (t).
(t).
Формирование управляющего воздействия (принятие решений), заключается в определении значений управляемых переменных, приводящих объект управления в желаемое состояние.
На рис. 3.1 представлен вариант функциональной схемы системы управления. Она имеет программатор, определяющий программу или план; устройство сравнения, осуществляющее операцию контроля; устройство формирования управляющего воздействия; исполнительный орган, реализующий управляющее воздействие; объект управления; датчик или первичный преобразователь, который переводит информацию о векторе состояния на физический носитель.
Функциональная схема системы (рис 3.2) регулирования отличается от схемы системы управления отсутствием программатора. Желаемое состояние объекта задается извне и называется обычно задающим воздействием.