

4.3Элементы системы автоматического управления технологическими процессами
Техническими элементами систем автоматического управления технологическими процессами являются средства получения, преобразования и регистрации первичной информации, аналоговые и цифровые вычислительные средства, исполнительные устройства. Детальное изучение их конструкций служит предметом специального курса. Однако, понимание общей теории управления невозможно без четкого представления об основных особенностях этих средств.
Устройства получения, преобразования и регистрации первичной информации – это датчики информации и вторичные приборы. К аналоговым устройствам относятся усилители, исполнительные устройства, регуляторы.
Исполнительными устройствами являются технические элементы, оказывающие непосредственное физическое воздействие на объект управления.
При рассмотрении общих характеристик этих устройств, будем считать, что любой из них можно представить как преобразователь входного сигнала x в выходной сигнал y, реализующий функциональную зависимость.
![]()
![]()
Рисунок 4‑7 – элемент системы управления.
Рассмотрим три основные характеристики технических элементов: коэффициент преобразования, погрешность и порог чувствительности.
Коэффициент преобразования - это
отношение выходной величины к входной![]() , или отношение их приращений
, или отношение их приращений![]() .
.
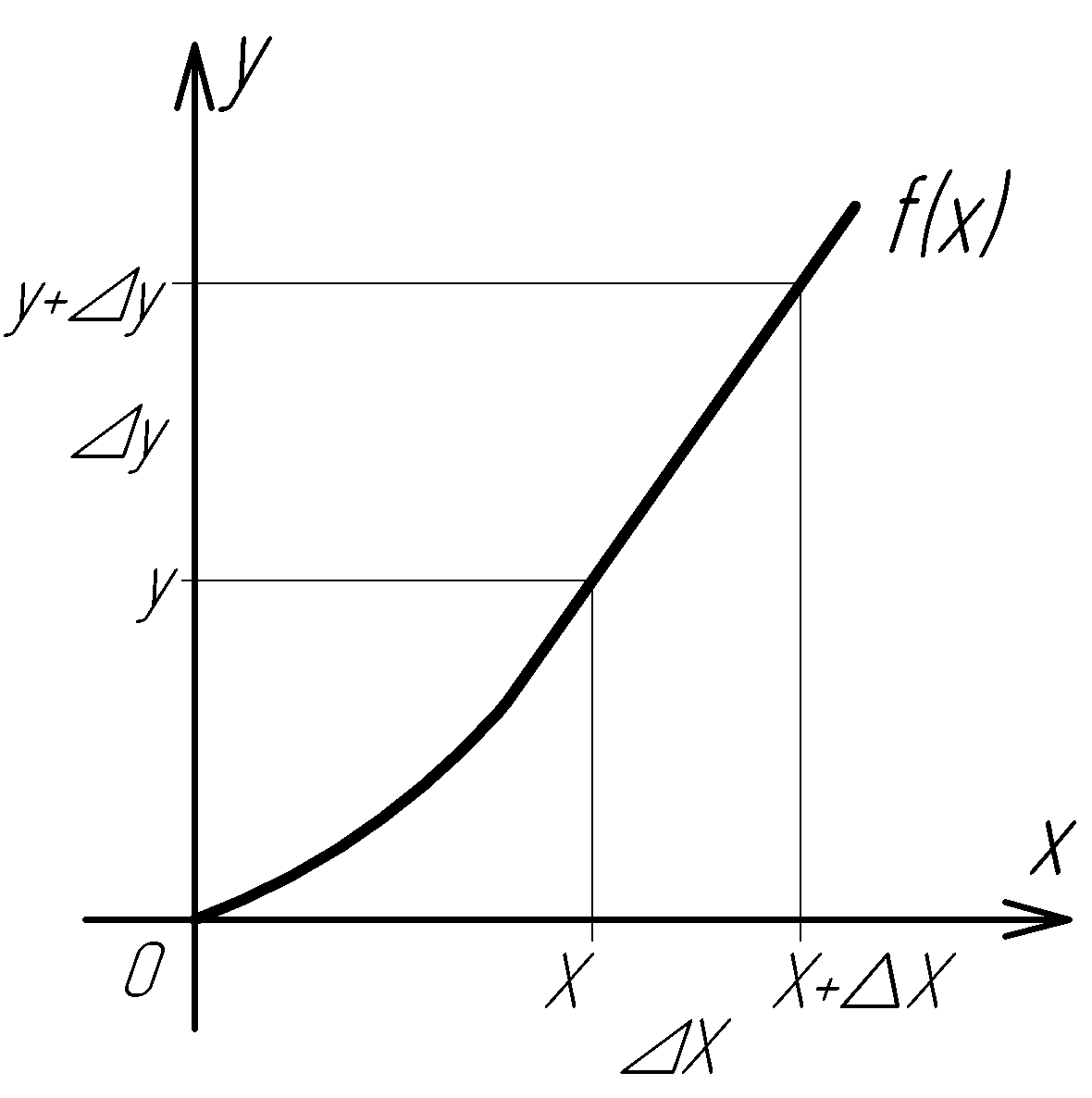
Рисунок 4‑8 Схема определения коэффициента преобразования.
Единицы измерения коэффициента преобразования обусловлена единицами измерения входных и выходных величин.
Иногда используют безразмерный
относительный коэффициент преобразования,
которым показывают отношение относительных
приращений выходных и входных величин.
Или при
![]()
Если функция
![]() является пропорциональной зависимостью
или линейной, то
является пропорциональной зависимостью
или линейной, то
![]() ,
,
![]() .
Применительно к отдельным функциональным
элементам коэффициент преобразования
подходит по назначению.
.
Применительно к отдельным функциональным
элементам коэффициент преобразования
подходит по назначению.
Для датчиков - это чувствительность.
Для усилителей – коэффициент усиления (по току, напряжению, мощности).
Требования к значению коэффициента преобразования обусловлены назначением элемента. Так, например, применительно к датчикам требуется максимальная чувствительность, а к стабилизаторам минимальная, к усилителям предъявляется максимальное усиление.
Нужно отметить, что в усилителях широко используется обратная связь для улучшения коэффициента усиления, или повышения его стабильности. В первом случае вводят положительную обратную связь, а во втором - отрицательную.
Погрешность – отклонение выходной величины от источника значения, вследствие изменения внутренних свойств элемента или внешних условий работы. При наличии погрешности y’ = F(x) отлична от градуированной y=F(x).
Погрешность может иметь разные названия в зависимости от причин, вызывающих её – температурная, частотная, амплитудная и.т.п. Вводятся понятия абсолютной, относительной и приведенной относительной погрешности.
Абсолютная -
![]()
Относительная
![]()
Приведенная относительная погрешность
![]()
y - значение выходной переменной.
Порог чувствительности – минимальное по абсолютной величине приращение входной величины (x, x2-x1), вызывающее изменение выходной величины y. Интервал [X1, X2] называют зоной чувствительности.
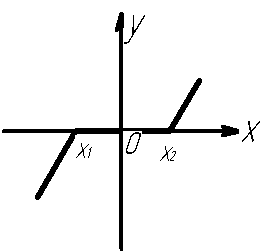
Рисунок 4‑9 Порог чувствительности при наличии трения.
Причиной существования порога чувствительности является наличие люфта, трения или инерции у различных элементов (двигатель реле), а также наличие внутренних шумов усилителей.