

Классификация технических задач управления
Управление движением механических объектов:
Управляемыми являются процессы изменения некоторых координат и скоростей, а управляющими являются внешние силы. Цель управления - задание желаемых значений координат и скоростей в определенные моменты времени, или на определенных участках траектории.
Управление электротехническими (электронными) объектами, где управляемыми являются процессы изменения напряжения, тока, мощности, а управляющими воздействиями являются электродвижущие силы (ЭДС), или токи от внешних источников, или сопротивления, емкости, индуктивности с варьируемыми характеристиками. Цели управления - обеспечения постоянства напряжения между различными узлами системы, стабилизация частоты и т.п. поддержание постоянства тока катода в системе катодного напыления.
Управление теплотехническими объектами. Управляемыми являются процессы изменения температур в различных точках объекта, а воздействие осуществляется путем подвода тепловой энергии. Цель управления - поддержание некоторого распределения температур. Эта задача характерна толстопленочной технологии или процессам пайки, обжига пасты.
Управление химической технологией. Здесь управляемым является как изменение температур, так и измерение концентраций различных веществ.
Управляющим воздействием является изменение подхода энергии (топлива, освещения), вещества, а целью – обеспечение желаемого количества выходного продукта или постоянства его качественных физико-химических характеристик.
Эти проблемы в процессе изготовления микросборок зачастую проявляются, поскольку микроэлектронные приборы являются сложными системами, в которых взаимодействуют и механические, и электромагнитные, и термодинамические, и химические процессы. Однако, не смотря на разнообразные технические проблемы, существуют общие принципы управления. Эти общие принципы заключаются в том, что любая система управления строится на основе трех функциональных блоков.
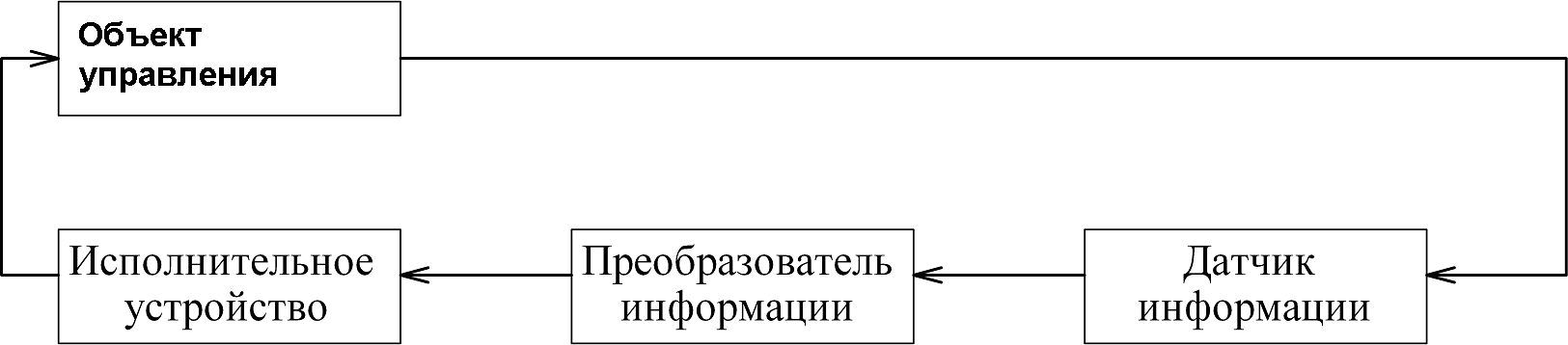
Рисунок 4‑6 Схема обратной связи
Первый блок состоит из устройств, позволяющих получить информацию о текущих значениях управляемых процессов. Этот блок называется измерительным или блоком датчика информации (Д.И.). В ходе функционирования этого блока, выдаются информационные сигналы, эти информационные сигналы поступают во 2ой блок - блок преобразования и хранения информационных сигналов (ПИ), где на их основе, а также по априорной информации, вырабатываются сигналы управления. Правило (алгоритм) преобразования информационных сигналов в сигналы управления, называется сигналом управления. Сигнал управления показывает, каким должно быть управляющие воздействие в текущее момент времени. Чтобы выработать это воздействие, превратить информационный сигнал, в механическую силу или поток тепла, или поток вещества (деталей), требуется ещё один блок - исполнительное устройство (ИУ).
Как показано на рисунке 4-2 совокупность перечисленных блоков образует компонент управления, охватывающий объект управления. Такую систему называют замкнутой системой, или системой с обратной связью.
Иногда присутствуют разомкнутые системы, где датчики информации отсутствуют, а функция преобразования сводится лишь к хранению и выдаче выработанной программы управления. В такой системе управления можно выделить информационную часть и энергетическую (силовую) часть, служащую для преобразования сигналов управления в управляющее воздействие на объект.