

4.5Различитель уровня
Предназначен для измерения разности двух входных напряжений. Такое измерение можно осуществить, используя электромагнитное устройство (например, трансформатор или магнитный усилитель).
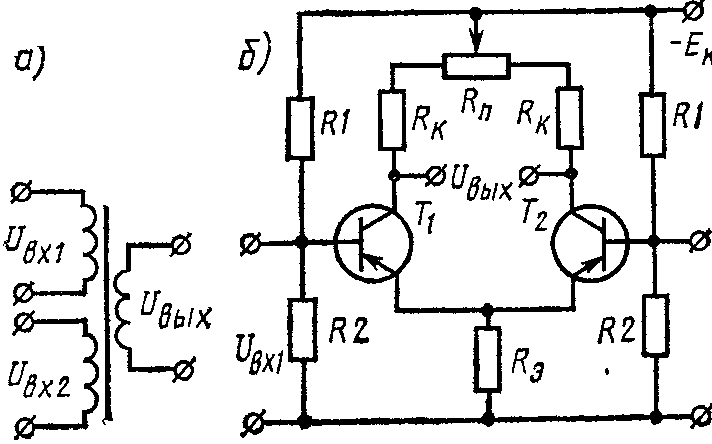
Рисунок 4‑12 Различитель уровня.
На Рисунок 4 -12 Различитель уровня. показан параллельно – балансный каскад, выполненный на трансформаторе, который применяется в качестве различителя уровня.
Делители напряжения R1, R2 задают начальные смещения на базы транзисторов Т1 и Т2, а их эмиттеры включены через сопротивление Rэ. Для того чтобы выходное напряжение Uвых было равно нулю, при отсутствии входных сигналов Uвх1 и Uвх2 или при их равенстве, источник питания Ек подключают к коллекторным сопротивлениям Rк каскада через переменное сопротивление Rп. В этих каскадах практически отсутствует дрейф, а коэффициент усиления значительно выше, чем в однотактных усилителях. Напряжение на выходе
Uвых = ктр(Uвх1 – Uвх2) (4.2)
где ктр — коэффициент усиления по напряжению.
4.6Вопросы
Что может служить чувствительным элементом?
Что называется управляющим устройством?
В чем назначение исполнительных устройств?
Какой орган может быть аналогом устройств преобразования сигналов?
Какой орган может быть аналогом устройств получения сигналов?
Какой орган может быть аналогом устройств обработки сигналов?
Как классифицируются задачи управления?
В чем назначение различителя уровня?
5Лекция №5 Вторичные приборы сау
5.1Классификация вторичных приборов
Любой технологический процесс требует контроля, а в случае необходимости и регистрации основных своих параметров. Для этого в системы автоматики включаются вторичные приборы, работающие в комплекте с датчиками. Вторичные приборы измеряют выходной сигнал датчиков.
К вторичным приборам относятся:
милливольтметры
миллиамперметры
автоматические уравновешенные мосты и т.п.
Вторичные приборы делятся на:
не балансные
балансные
Небалансные приборы непосредственно измеряют выходной сигнал датчика Контролируемый параметр Xi (рис 5.1).
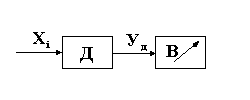
Рисунок 5‑13 Схема небалансного прибора
где Д- датчики;
В - вторичный прибор например, милливольтметр с термопарой.
Балансные вторичные приборы - более точные системы измерения.
Они построены на принципе балансирования (уравновешения) выходной величины датчика равной ей величиной (рис. 5.2).
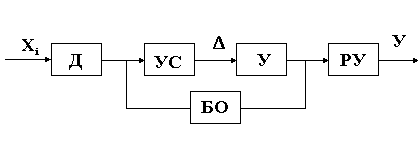
Рисунок 5‑14 Компенсатор
Такой прибор - компенсатор является самостоятельной системой автоматического управления, поэтому эта измерительная система обладает рядом преимуществ перед не балансной. В ней отсутствуют погрешности, вызванные колебаниями напряжения питания, нестабильностью усиления усилителя и др.
По виду балансируемой величины вторичные приборы делятся на:
Автоматические потенциометры;
Автоматические самобалансирующиеся мосты.
Первые балансируют выходное напряжение датчика. Вторые уравновешивают выходное сопротивление датчика.
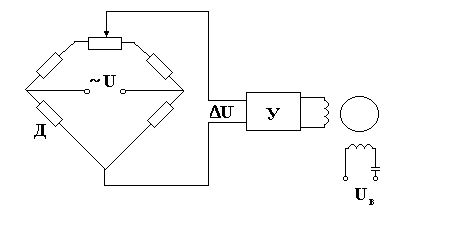
Рисунок 5‑15 Схема автоматического потенциометра
где Д- датчик сопротивления (термосопротивление, тензодатчик);
У - усилитель переменного напряжения.
Функциональная схема автоматического моста непрерывного балансирования.
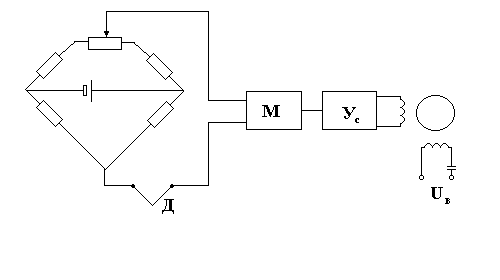
Рисунок 5‑16 Функциональная схема электронного автоматического потенциометра.
где Д - термопара;
М - модулятор.
Автоматические электронные потенциометры обладают высоким быстродействием и точностью, которые обусловлены тем, что прибор является астатической системой автоматического управления.