

§ 13. Определение направляющих косинусов
Получим формулы, выражающие девять направляющих косинусов через три параметра:
![]()
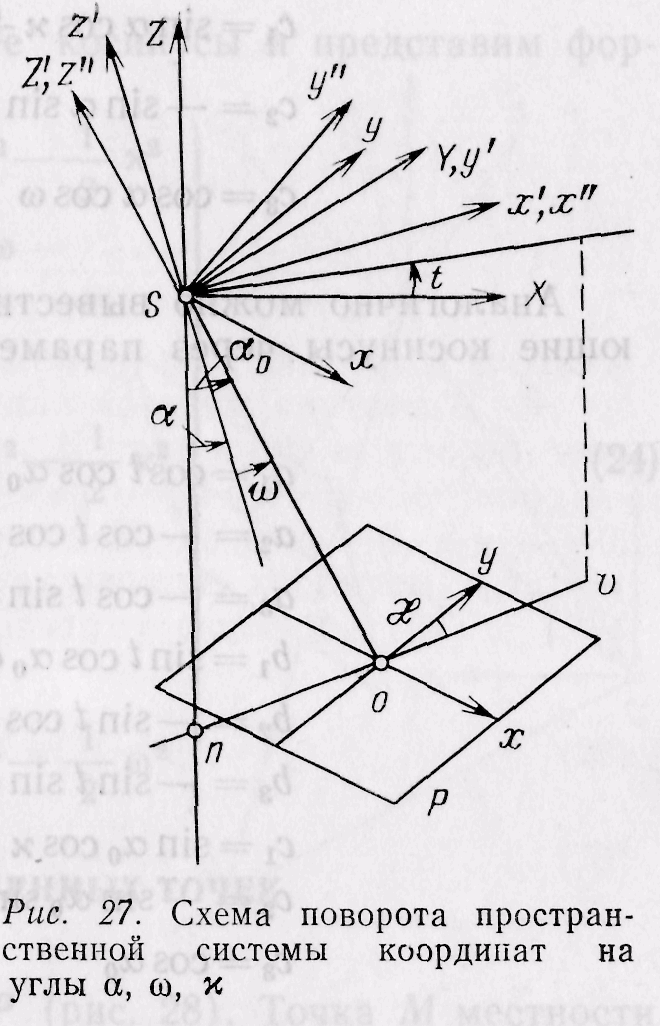
Для этого повернем систему координат SXYZ на углы
(рис. 27). Первый поворот вокруг оси У преобразует систему SXYZ в Sx'y'z'. Второй поворот вокруг оси х' преобразует систему координат Sx'y'z' в систему Sx"y"z". Третий поворот вокруг оси z" позволяет совместить систему координат Sx"y"z" с системой Sxyz.
Таблица 2

Составим таблицу для углов между координатными осями (табл.2).
Пользуясь этой таблицей, напишем матрицы, соответствующие поворотам

Составим произведение этих матриц А — АаАωА .
Умножить матрицу Аа на матрицу Аω — значит составить новую матрицу Ааω, компоненты которой получаются в результате умножения строк матрицы Аа на столбцы матрицы А ω. Действуя по этому правилу, получим

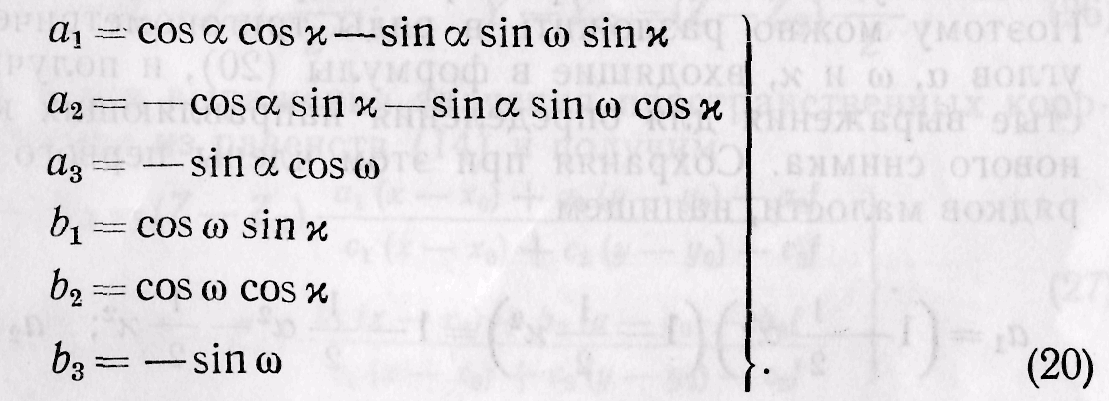
Умножив эту матрицу на матрицу А , найдем
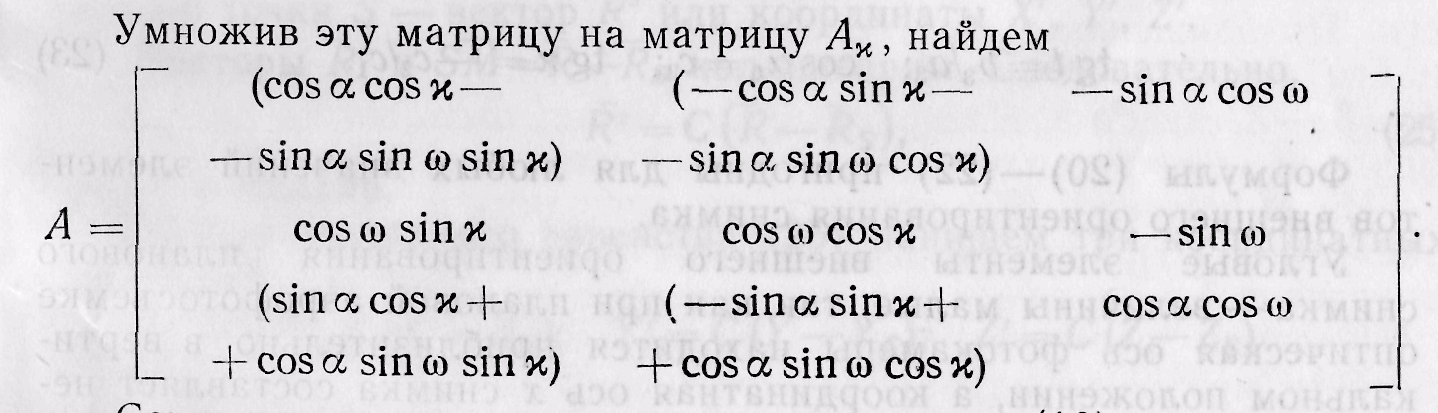
Сопоставляя это выражение с равенством (16), получаем
Аналогично
можно вывести формулы, выражающие
направляющие косинусы через параметры
t,
α0
и
![]() :
:
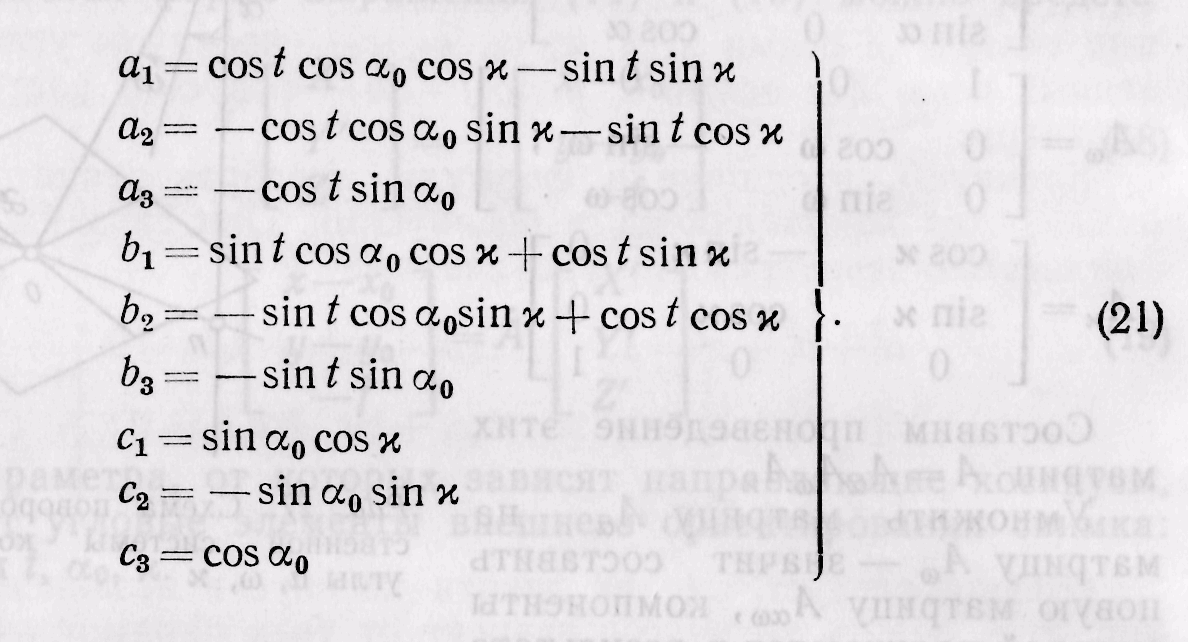
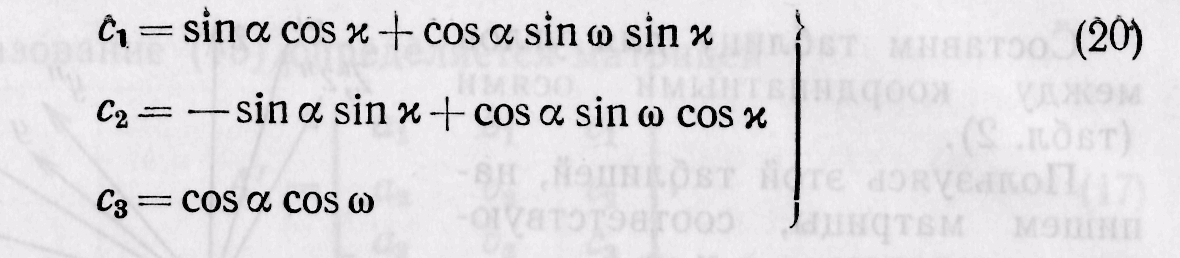
Если направляющие косинусы известны, то, как следует из формул (20) и (21), можно найти угловые элементы внешнего ориентирования снимка:

Формулы (20) — (22) пригодны для любых значений элементов внешнего ориентирования снимка.
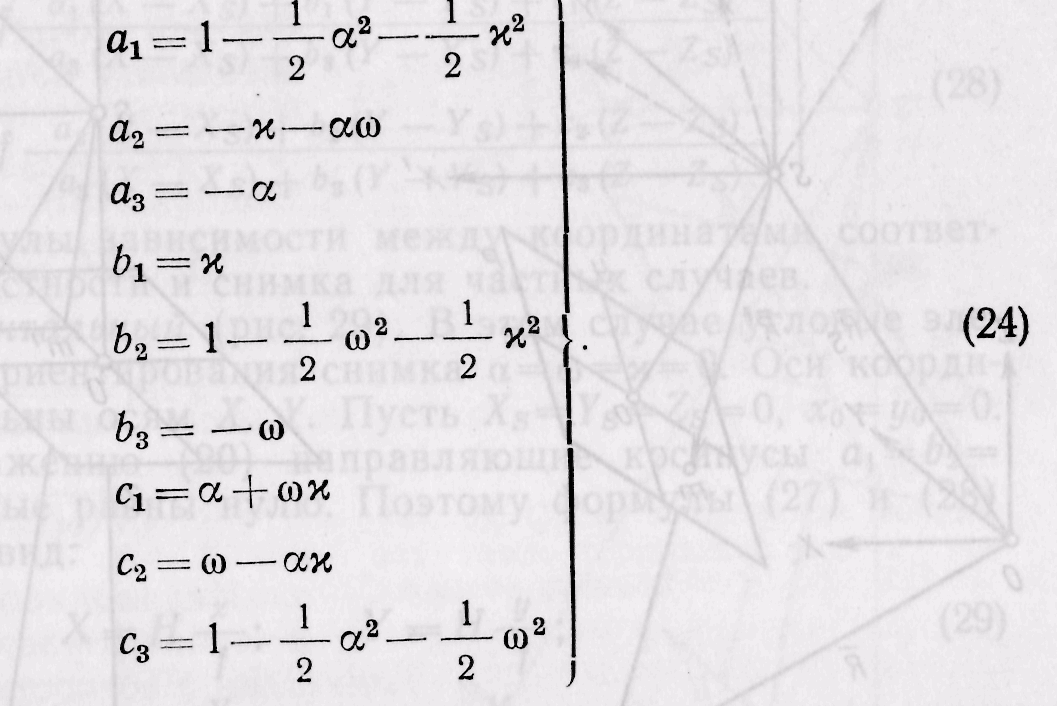
Угловые элементы внешнего ориентирования планового снимка — величины малые, так как при плановой аэрофотосъемке оптическая ось фотокамеры находится приблизительно в вертикальном положении, а координатная ось х снимка составляет небольшой угол с осью X фотограмметрической системы координат. Поэтому можно разложить в ряды тригонометрические функции углов а, со и к, входящие в формулы (20), и получить более простые выражения для определения направляющих косинусов планового снимка. Сохраняя при этом члены первого и второго порядков малости, напишем
![]()
Аналогично получим остальные косинусы и представим формулы (20) в таком виде:
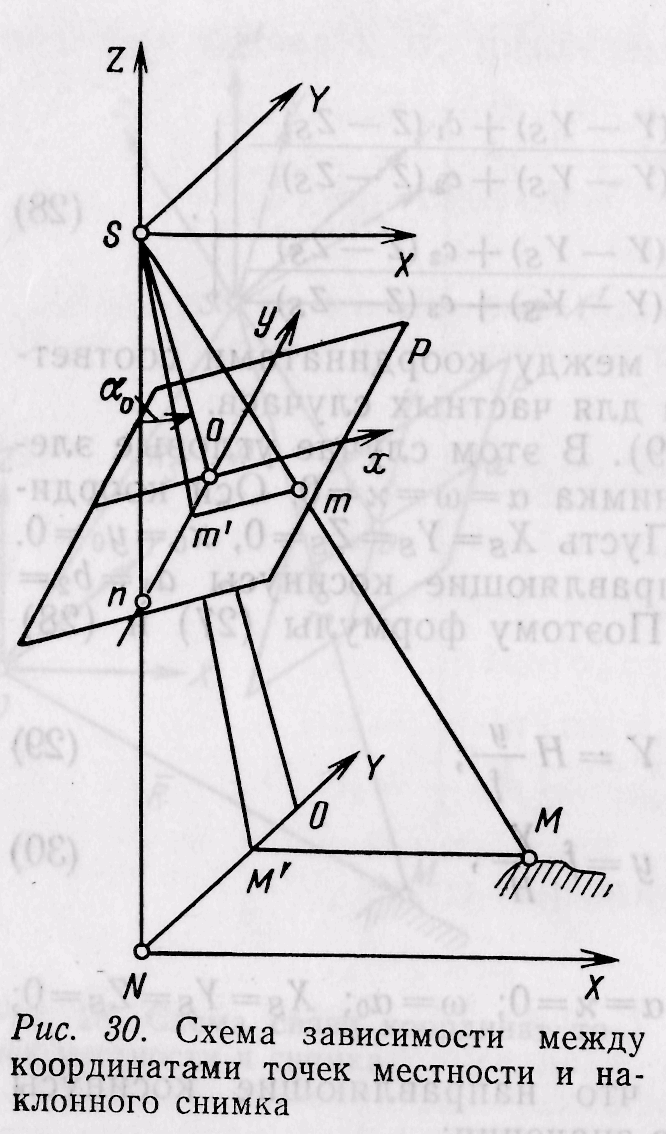
§ 14. Связь координат соответственных точек местности и снимка
Пусть с точки S получен снимок Р (рис. 28). Точка М местности изобразилась в точке т. Найдем зависимость между координатами этих точек.
Положение
точки фотографирования S
относительно некоторого начала О
определяет вектор Rs
или
координаты Xs,
Ys,
Zs.
Положение
точки М
относительно
того же начала определяет вектор
![]() или
координаты Хм,
Y
м,
Zm,
а
положение точки т
относительно
точки S — вектор
или
координаты Хм,
Y
м,
Zm,
а
положение точки т
относительно
точки S — вектор
![]() или
координаты X',
Y´,
Z'.
или
координаты X',
Y´,
Z'.
Векторы
и
![]() коллинеарны.
Следовательно,
коллинеарны.
Следовательно,
![]()
где С — скаляр.
Вместо векторного равенства (25) напишем три координатных равенства:

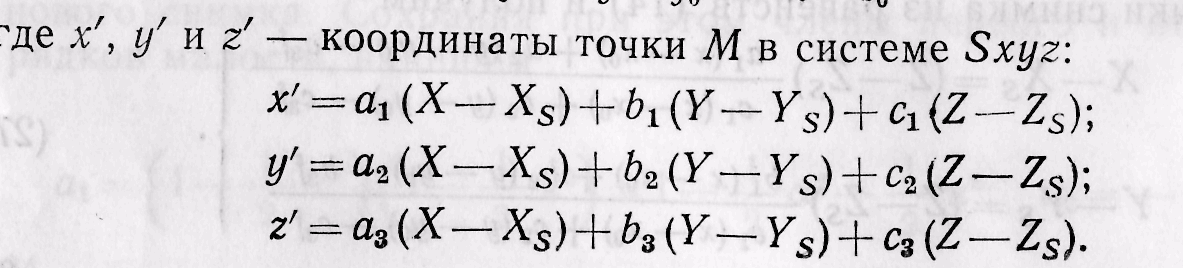
Подставим в эти выражения значения пространственных координат точки снимка из равенств (14) и получим


Итак, один снимок позволяет составить для каждой изобразившейся на нем точки два уравнения с тремя неизвестными координатами точки местности. Отсюда следует, что данных одного снимка недостаточно для определения положения точки местности. По одиночному снимку координаты точки местности можно найти лишь в частном случае, когда высота фотографирования H=ZS—Z известна. На практике это может быть, когда местность почти не отличается от горизонтальной плоскости.
Из выражений (27) следует, что координаты точки местности зависят от координат ее изображения на снимке и от элементов внутреннего и внешнего ориентирования снимка.
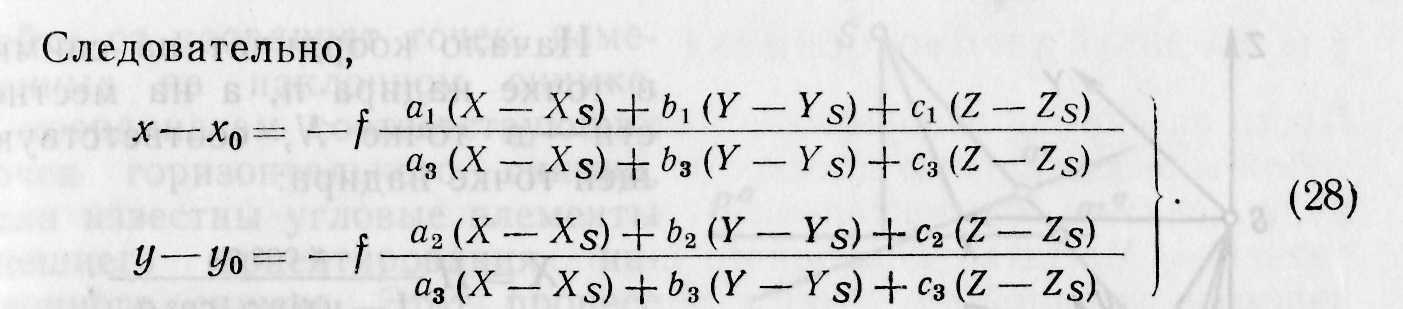
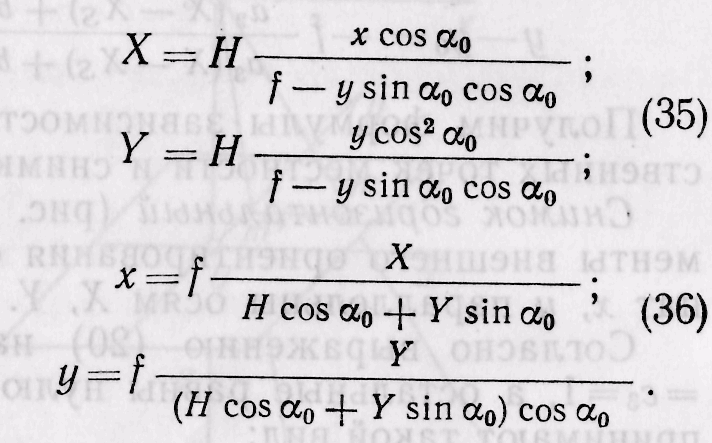
Получим формулы, выражающие обратную связь, т. е. зависимость между координатами точки снимка и координатами соответствующей точки местности. Для этого спроектируем вектор (25) на координатные оси х, у и z:

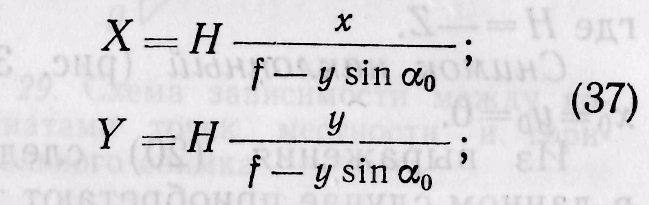
Получим формулы зависимости между координатами соответственных точек местности и снимка для частных случаев.
Снимок горизонтальный (рис. 29). В этом случае угловые элементы внешнего ориентирования снимка α = ω = = 0. Оси координат х, у параллельны осям X, Y. Пусть XS=YS=ZS=O, xo = yo = O.
Согласно выражению (20) направляющие косинусы al = b2 = с3=1, а остальные равны нулю. Поэтому формулы (27) и (28) принимают такой вид:


Эти уравнения выведены для случая, когда начало координат на снимке находится в главной точке, а начало координат на местности совмещено с точкой N, соответствующей точке надира п (см. рис. 30). Формулы для других случаев расположения координатных систем на снимке и на местности можно получить из выражений (31) и (32) путем параллельного переноса этих систем.
Начало координат на снимке в главной точке о, а на местности — в точке О, соответствующей главной точке (см. рис. 4):

Начало координат на снимке в точке надира п, а на местности — в точке N, соответствующей точке надира:
Начало координат на снимке в точке нулевых искажений с, а на местности — в точке С, соответствующей точке нулевых искажений:
![]()
Начало координат на снимке в главной точке схода I, а на местности — в точке К, лежащей на линии направления съемки и образующей параллелограмм с точками S, I, V:

Начала координат х, у и X, Y в точке V—на пересечении линии направления съемки и главной вертикали:
