

119. Сравните характеристики двух последовательных интерфейсов rs-232с и usb. Приведите структурную организацию интерфейсов и формат передаваемых данных
120. Какие принципы программного управления характерны для командного и микро-командного способов управления. В чем сходство и различие этих способов. Покажите на примере структурной схемы устройств управления
Вычислительную машину относят к цифровому автомату который строят в том числе с использованием принципов программного управления (фоннеймана). Принципы были сформулированы давно и с той поры некоторые из них пытаются реализовать. С появлением параллельных ЭВМ часть этих положений иногда отвергается. Однако классическая организация ЭВМ построенная на принципах программного управления и любая ЭВМ будет работать если они соблюдаются:
Любая информация используемая в ЭВМ представляется двоичными кодами, которые имеют фиксированную длину.
Слова информации размещаются в ячейках памяти. При этом ячейки имеют номера. Номер ячейки называется адресом.
Задача на ЭВМ решается согласно алгоритма – последовательности действий. Эта последовательность определяется способом решения задачи. Каждая команда (управляющее слово) показывает исполнительному устройству что делать (какую одну команду выполнить).
Команды как и данные кодируются в двоичной форме и располагаются последовательно, но в ячейках памяти.
Выполнение операций (действий) предписанных алгоритмом сводится к последовательному извлечению из памяти и формированию управляющих сигналов для исполнительного устройства.
Основное отличие вычислительной машины от цифрового автомата – на каждом шаге ЭВМ формирует признаки результата. И на основании них можно изменить текущий адрес не на +1, а на некоторое произвольное число согласно программе.
Согласно уровня управления команд различают 3 типа:
микрокоманды – выполняют элементарные преобразования. Например переслать из одного регистра в другой. Микрокоманды выполняются за один период тактового сигнала. Поэтому часто могут использовать передние и задние фронты для фиксации (например адреса и данных).
команды – обычно состоят из нескольких микрокоманд. Пример команды (прочитать содержимое одного регистра, другого регистра, сложить их).
Н а
сегодня команды распространены шире,
но любая команда более крупный строительный
блок, поэтому время выполнения на
командах больше чем, если бы мы использовали
микрокоманды. Команды обычно представляются
форматом команды – условное обозначение
того, что лежит в ПЗУ.
а
сегодня команды распространены шире,
но любая команда более крупный строительный
блок, поэтому время выполнения на
командах больше чем, если бы мы использовали
микрокоманды. Команды обычно представляются
форматом команды – условное обозначение
того, что лежит в ПЗУ.
П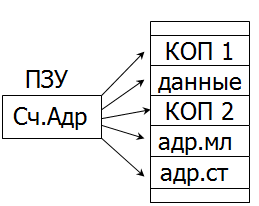 оскольку
принято ячейки брать длинной 1 байт, то
в памяти каждая команда будет занимать
столько байт сколько их в формате
команды.
оскольку
принято ячейки брать длинной 1 байт, то
в памяти каждая команда будет занимать
столько байт сколько их в формате
команды.
Команды находясь в памяти команд должны преобразовываться в управляющие сигналы. Поэтому в ЭВМ существует обязательный блок – блок управления. Его задача получить из принятой команды набор управляющих сигналов которые включают/выключают узлы операционного устройства.
Команды из памяти команд читаем по адресу формируемому счетчиком адреса. А из памяти данных мы читаем по адресу который берем из внутреннего регистра CPU.
Совокупность значений наиболее существенных информационных элементов называется вектором состояния или словом состояния процессора (в некоторых случаях она называется словом состояния программы). Вектор состояния в каждый момент времени должен содержать информацию, достаточную для продолжения выполнения программы или повторного пуска ее с точки, соответствующей моменту формирования данного вектора. Вектор состояния формируется в соответствующем регистре процессора или в группе регистров, которые могут использоваться и для других целей.
Считают, что начало организации вычислений в цифровом автомате было положено принципами программного управления. На начальном этапе эти принципы считались незыблемыми, но сегодня некоторые положения могут трактоваться необязательными. Выделяют 5 основных принципов программного управления: 1) информация кодируется в двоичной форме и разделяется на единицы информации, называемыми словами. Но помимо двоичной системы в технике применяют троичную (SD). Но применяют ее лишь для преобразователей и комбинационных схем, в которых управляющие сигналы практически не применяются.
2) Разнотипные слова подразделяются по способу использования, а не по системе кодирования: данные, адреса и коды команд осциллографом не различимы. Мы их различаем местом нахождения.
3) Слова информации размещаются в ячейки памяти машины и идентифицируются по номеру ячейки памяти.
4) Алгоритм выполнения задачи представляется в форме последовательности управляющих слов, которые определяют операции и слова информации. Такую последовательность называют кодами.
Программа – это последовательное выполнение команд в порядке обозначенном алгоритмом. Иногда программу определяют как алгоритм, представленный в терминах команд. Каждая операция (команда) может преобразовывать операнды различного уровня сложности. На сегодня различают три уровня: 1) микрокоманды: элементарное преобразование операнда. Например: занесение с входа в память, пересылка из одного регистра в другой, вывод содержимого регистра на выходных данных. Главное отличая микрокоманд – она выполняется за один такт синхронизации. Поскольку у тактового импульса два фронта, возможно, в рамках микрокоманды “протолкнуть информацию” через два регистра. На большее фронтов нет. Обычно микрокоманда составная часть операции. Любая микрокоманда состоит из двух действий: фиксации входа операнда в регистре (памяти) момент фиксации – фонт синхросигнала. И действие – фиксация выходного сигнала по срезу синхроимпульса. Длительность импульса необходима чтобы: а) закончить переходные процессы в регистре б) чтобы сигнал был преобразован комбинационной схемой и истинным стоял на входе регистра. Современная микрокоманда, как правило, элементарная операция АЛУ типа сложения. Микрокоманда присутствует в любом вычислителе, программно они же не ощущаются. 2) команды часто приравнивают к операциям. Например, сложение и вычитание. Действительно логически проще мыслить операцией. Поэтому, это наиболее распространенный вид управления, большинство современных вычислителей основано на командном уровне управления.. команда включает в себя множество микрокоманд. Их число от единиц до десятков. При этом не обязательно помнить все микрокоманды текущей команды. Их последовательность формируется автоматически по жесткой программе. 3) Макрокоманды или тэги. Макрокоманды появились в силу того, что сложные процедуры требовали большого числа команд, обращений в память. Переход на макрокоманды сокращал число обращений в память, повышая тем самым скорость выполнения. В любой ситуации макрокоманды так же состояли из последовательности микрокоманды. В зависимости от вида управления информация, хранящаяся в памяти, представляется как формат микрокоманды, команды, макрокоманды. Принято изображать любой формат прямоугольником с соответствующей длины с указанием начального и конечного разрядов информации. Если принято байтовая система (слово) формат разделяется на байты. Такое деление необходимо, чтобы каждую команду можно было осмыслить. Понять по ее формату работу (состав). В приделах формата команда представляется полями, поэтому это деление может быть показано. Первым словом (байтом) любой команды всегда идет КОП. За КОП могут следовать адреса – вначале младший затем старший байты; данные – также. Если команда сложная она размещается не в одном байте КОП. последующие байты КОП называются пост байтами. Команда, какой бы сложности она не была, хранится в ячейках ПЗУ.
Процессор в первом шаге выполнения любой команды выставляет на ШД или в регистр состояния – КОП (фазы), которую будет выполнять. Начало команды – всегда выборка команды. Такой код называется словом состояния процессора. Этот код помогает выработать управляющие сигналы для других схем вычислителя: памяти, ВУ и т.д. В каждом цикле (r/w) ССП меняется, и используя его, можно формировать сигналы управления для всех ВУ. Во многих структурах эти сигналы формируются из слово состояния системным контроллером. Если слово состояние не выводится на ШД, оно фиксируется во внутреннем регистре состояний, и управляющие сигналы появляются на выходных ногах процессора. Команда выполняется как: 1) из ПЗУ читается КОП за ним последующие байты (поля команд). Для каждого поля (байта) устройство управления формирует слово состояния, из разрядов которого можно получить требуемые активные сигналы, для включения ОЗУ, ПЗУ и других ВУ. Фиксация состояний – по фронтам синхросигналов.