

- •Введение
- •Глава 2. Параллактический треугольник светила и его решение
- •§4. Параллактический треугольник и его решение по основным формулам
- •§5. Вычисление высоты и азимута светила по системам формул
- •§7. Разложение высоты и азимута в ряд Тейлора. Теория таблиц численного типа
- •§1. Небесная сфера
- •§2. Системы сферических координат
- •§3. Графическое решение задач на небесной сфере
- •Глава 3. Видимое суточное движение светил. Изменение координат светил
- •§9. Характеристика суточного движения светил
- •§10. Явления, связанные с суточным движением светил
- •§11. Изменение координат светил вследствие видимого суточного движения
- •Глава 4. Обращение Земли вокруг Солнца. Видимое движение Солнца и изменение его координат
- •§13. Обращение Земли по орбите и видимое годовое движение Солнца
- •§14. Изменение экваториальных координат Солнца в течение года
- •Глава 5. Орбитальное и видимое движение планет, Луны и искусственных спутников
- •§18. Фазы и возраст Луны
- •§21. Орбитальное движение искусственных спутников
- •Глава 6. Измерение времени
- •§22. Основы измерения времени
- •§23. Звездные сутки. Звездное время. Основная формула времени
- •§26. Поясное, декретное, летнее, московское и стандартное времена, их связь с местной системой
- •§28. Понятие о точных шкалах времени
- •Глава 7. Вычисление видимых координат светил. МАЕ
- •§31. Понятие о вычислении видимых координат светил на ЭВМ
- •§32. Устройство таблиц МАЕ для расчета часовых углов и склонений светил
- •§33. Определение времени кульминации светил
- •§34. Обоснование расчета времени видимого восхода (захода) Солнца и Луны и времени сумерек
- •§35. Определение времени восхода и захода Солнца и Луны и времени сумерек по МАЕ
- •Глава 8. Измерители времени. Судовая служба времени
- •Глава 9. Звездное небо. Звездный глобус
- •§42. Устройство звездного глобуса, его установка. Понятие о других пособиях
- •§43. Решение задач с помощью звездного глобуса
- •Глава 10. Секстан
- •§44. Основы теории навигационного секстана
- •§45. Устройство навигационных секстанов
- •§46. Понятие об инструментальных ошибках секстана и их учете
- •§47. Понятие о секстанах с искусственным горизонтом
- •Глава 11. Наблюдения с навигационным секстаном
- •§48. Выверка навигационного секстана на судне
- •§50. Приемы измерения высот светил над видимым горизонтом
- •§53. Наклонение видимого горизонта. Наклонение зрительного луча
- •§55. Общий случай исправления высот светил, измеренных над видимым горизонтом
- •§56. Частные случаи исправления высот светил
- •§57. Приведение высот светил к одному зениту (месту) и одному моменту
- •§58. Определение средних квадратических ошибок поправок и измерения углов
- •§59. Определение средней квадратической ошибки измерения высот светил в море
- •Глава 13. Астрономическое определение поправки компаса
- •§60. Основы астрономического определения поправки компаса
- •§62. Пеленгование светил. Точность поправки компаса
- •§63. Определение поправки компаса. Общий случай
- •Глава 14. Теоретические основы определения места судна по светилам
- •§65. Общие принципы астрономического определения места
- •§67. Метод линий положения. Высотная линия положения
- •§72. Ошибки в высотной линии. Оценка ее точности и вес
- •Глава 16. Методы отыскания места судна и оценки его точности при наличии ошибок в высотных линиях
- •Глава 17. Определение места по одновременным наблюдениям светил. Общий случай
- •§76. Особенности определения места по одновременным наблюдениям светил
- •§77. Общий случай определения места по звездам
- •§78. Определение места днем по одновременным наблюдениям Луны и Солнца
- •§79. Определение места днем по одновременным наблюдениям Венеры и Солнца
- •§80. Определение места по одновременным наблюдениям Венеры, Луны и Солнца
- •Глава 18. Определение места судна по разновременным наблюдениям Солнца
- •§81. Особенности определения места по разновременным наблюдениям Солнца
- •§82. Влияние ошибок счисления и наивыгоднейшие условия для определения места по Солнцу
- •§83. Определение места по Солнцу в общем случае
- •§84. Определение места комбинированием навигационных и астрономических линий положения
- •Глава 19. Ускоренные способы обработки наблюдений
- •§86. Обзор приемов ускорения обработки наблюдений
- •§87. Прием перемещения счислимого места
- •§88. Определение места с предварительной обработкой (предвычислением) линий положения
- •§92. Решение астрономических задач на клавишных ЭВМ
- •Глава 20. Частные методы определения координат места судна
- •§93. Определение широты места по меридиональной и наибольшей высотам Солнца. Понятие о близмеридиональных высотах
- •§96. Определение координат места в малых широтах по соответствующим высотам Солнца
- •§97. Графический способ определения места при высотах Солнца, больших 88°
- •§98. Особенности определения места в высоких широтах
- •Глава 21. Перспективы развития методов астрономических определений в море. Краткий исторический очерк
- •§99. Понятие об астронавигационных системах и навигационных комплексах
- •§100. Краткий очерк истории мореходной астрономии
- •Список литературы

Глава 21
ПЕРСПЕКТИВЫ РАЗВИТИЯ МЕТОДОВ АСТРОНОМИЧЕСКИХ ОПРЕДЕЛЕНИЙ В МОРЕ. КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК
§99. ПОНЯТИЕ ОБ АСТРОНАВИГАЦИОННЫХ СИСТЕМАХ И НАВИГАЦИОННЫХ КОМПЛЕКСАХ1
Методы астрономического определения места с помощью «ручных» наблюдений и вычислений после второй мировой войны не отвечали возросшим требованиям к быстроте и постоянству получения информации со стороны авиации и флотов. В связи с этим в 50-е и особенно 60-е годы в ряде государств разрабатываются и внедряются в навигационную практику флотов автоматические или полуавтоматические астронавигационные системы. Эти системы можно разделить на:
—астронавигационные системы — на основе радиосекстана, т.е. радиоастрономические системы;
—оптические астронавигационные системы — на основе фотосекстана или перископического секстана;
—космические (спутниковые) навигационные системы — использующие излучение искусственных спутников Земли (определение места по спутникам рассматривается в навигации).
В этих системах приборы, воспринимающие излучение и дающие необходимую информацию (высоты, азимуты, расстояния и др.), работают обязательно в сочетании с ЭВМ, вычисляющими координаты места и управляющими самими приборами. Поэтому здесь мы имеем дело не с отдельным прибором, а с автоматизированной системой приборов, которая и называется астронавигационной системой. Судя по данным печати, эти
системы еще очень сложны, громоздки, дороги и требуют специального
1 По данным иностранной печати
487
обслуживания, вследствие чего на транспортных судах они пока практически не применяются, поэтому ограничимся кратким их обзором.
Радиосекстан. Земная атмосфера пропускает из космического пространства не только видимые лучи, но и радиоволны определенной длины. Выражаясь образно, атмосфера имеет два «окна» прозрачности: оптическое окно и радиоокно, через которые можно видеть и изучать вселенную. На рис. 180, а видно, что оптическое окно занимает участок спектра волн от 0,4 до 0,7 мкн, а для радиоизлучения земная атмосфера прозрачна на большем диапазоне
— от 0,8 до 20 мкн. Однако количество энергии радиоизлучения крайне мало и уловить его можно только очень чувствительными приборами. Судовые радиосекстаны представляют собой малогабаритные радиотелескопы, помещенные на подвижное основание; технически они более сложны, чем стационарные радиотелескопы. Первая действующая корабельная установка появилась в 1952 г. Объектами внеземного радиоизлучения являются: Солнце, Луна и свыше двух тысяч дискретных источников излучения, имеющих угловые размеры менее 5', например Кассиопея А (в созвездии Кассиопеи) в созвездии Лебедя и др. Из этих источников практически применимы сейчас Солнце, Луна и около 10 отдельных источников. Однако частоты и энергии их разные (рис. 180,б), поэтому радиосекстан выполнен лишь в двух вариантах: солнечный и солнечно-лунный с диапазоном волн от 0,87 до 3,2 см.
Радиосекстан, точнее, астронавигационная система с радиосекстаном, представляет собой систему приборов, состоящую из следующих основных узлов (рис. 181): антенного устройства 1, 3; приемного устройства 4, 5; следящей системы (системы сопровождения 10, 11); стабилизированной платформы на карданном подвесе 12; шахты и подъемника 13 для уборки антенны; панели с регистрирующей, осредняющей и контрольной аппаратурой; вычислительной машины 14.
488
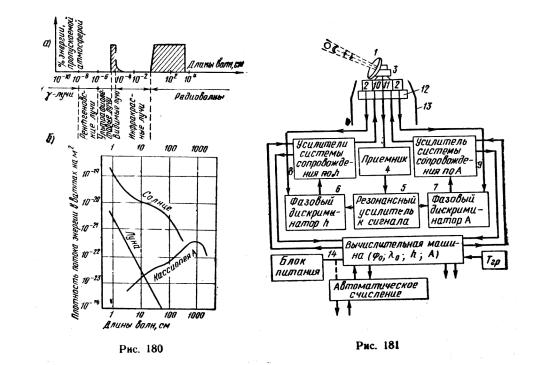
Для приема слабого космического радиоизлучения антенна имеет металлический рефлектор параболической формы, диаметром 70—120 см, предназначенный для концентрации энергии в фокусе, где помещена сама антенна в виде полуволнового диполя. Для отделения слабых космических сигналов от шумов в радиосекстане применяется модуляционный метод, основанный на прерывании сигналов (нутации) с частотой 20—30 Гц. Такую же дополнительную частоту в приемнике получают и принимаемые сигналы (эти модулированные сигналы можно теперь отделить от шумов и усилить). Принятые сигналы через волновод поступают в приемник 4 радиосекстана, сходный с радиолокационным приемником, а выходной сигнал приемника поступает в резонансный усилитель низкой частоты 5, пропускающий и усиливающий только полосы частот, близкие к частоте нутации. Усиленные сигналы поступают на вводы двух фазовых дискриминаторов 6 и 7, функции которых пояснены ниже.
Для осуществления слежения за Солнцем, т.е. его сопровождения, в радиосекстане действует следящая система по высоте и азимуту. В момент, когда антенна занимает некоторое нулевое положение относительно
489
стабилизированной платформы и диаметральной плоскости судна, от генератора опорных сигналов 2 поступают два сигнала — по L и А, разнящиеся по фазе на 90°. Частота опорных сигналов равна частоте нутации. Эти сигналы поступают на другой ввод фазовых дискриминаторов 6 и 7, куда подаются также после усиления принятые антенной сигналы космического излучения. В дискриминаторах определяется разность основного и опорного сигналов, представляющая отклонения антенны ∆h и ∆A от нуля, т.е. в данном случае от центра излучения Солнца. Эти сигналы усиливаются и преобразуются в команды двигателям 10 и 11 следящей системы, корректирующим положение антенны. Одновременно эти сигналы поступают на интегрирующие устройства, суммирующие их с предыдущей высотой и азимутом. Далее полученные h и А поступают в счетно-решающее устройство для получения координат места φ и λ.
В радиосекстане особенно большое внимание уделено вопросу стабилизации антенного устройства на качающемся судне. По данным печати, в установках применена инерционная стабилизация с помощью гироинтеграторов. Все антенное устройство подвешивается в кардановом подвесе и балансируется с целью уменьшения влияния ускорений; в штормовую погоду антенное устройство убирается подъемником в шахту. На показания радиосекстана, помимо ошибок радиометрической части и ошибок стабилизации, большое влияние оказывает атмосферная радиация и радиорефракция. Явление радиорефракции сходно с астрономической рефракцией и зависит от высоты светила, температуры, давления и влажности воздуха; поправка за нее выбирается из табл. 12 МТ—75 и вводится в высоты, как обычно. Исследования моделей зарубежных радиосекстанов показали, что эти приборы могут работать в любую погоду (при сильной грозе точность снижается), высота определяется с предельной ошибкой не более 3' (m≈±2'). Для применения на судах радиосекстан слишком сложен и в ближайшие годы перспектив не имеет.
Фотосекстан. Секстан с фотоэлектрическим телескопом предназначен
490
для автоматического измерения высот светил по их оптическому излучению. В качестве чувствительного элемента в фотосекстане применяются фотоэлементы или датчики, основанные на других принципах.
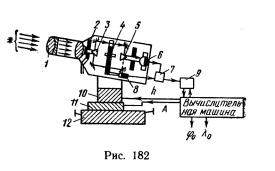
Схема фотосекстана для визирования звезд показана на рис. 182.
Световой поток, пройдя телескоп 1 и чувствительную диафрагму 2, попадает на призму 3, разделяющую световой поток на два направления, пропускаемые через вращающийся зубчатый обтюратор 4 и снова сводимые вместе собирающей призмой 5. Назначение этой системы — создать прерывистый световой поток и, следовательно, пульсирующий ток в фотоэлементе 6. Этот модулированный ток определенной частоты можно отделить от фона и помех и усилить.
В фазовом дискриминаторе 7 осуществляется сравнение тока фотоэлемента с частотой, создаваемой на обтюраторе мотором-генератором 8, и только одинаковая частота поступает на усилитель 9. В случае, когда световой луч сходит с оси диафрагмы 2, начинают работать моторы 10 и 11 следящей системы, пока луч вновь не придет на ось телескопа. Вся установка находится на стабилизированной платформе 12. Остальная схема в принципе сходна с радиосекстаном.
Понятие о решении астрономических задач в навигационных комплексах. Навигационный комплекс представляет систему датчиков информации,, устройств автоматического ввода ее в ЭВМ (навигационная и управляющая) и устройств вывода результатов решения на индикаторы (печать) и на. управляющие устройства.
491
На отдельных судах установлены комплексы «Data-bridge» «Digiplot» и отечественный комплекс. Первые два не имеют своих датчиков информации, а используют судовые — автоматически вводятся курс, скорость, данные от РЛС и спутниковой и других систем; могут вводиться с пульта управления также и астрономические данные.
Отечественный комплекс имеет свои датчики информации: гирокомпас, лаг, радиолокатор и др. Почти вся навигационная информация имеет автоматический ввод, включая КП и время, только высоты вводятся вручную. Полученная по обсервации информация выводится на печать и может использоваться для управляющих сигналов. В программах ЭВМ этого комплекса есть решение и астрономических задач. В 1975 г. фирма «Мицубиси» (Япония) начала выпуск комплекса TON АС, в котором предусмотрено решение всех перечисленных задач и выдача импульсов для управления судном. По-видимому, в ближайшем будущем навигационные комплексы получат распространение на крупных судах. Однако для распространения на все суда более перспективны малые клавишные ЭВМ со сменными или постоянными программами и, возможно, с частично автоматизированными вводами.
Перспективна также, на наш взгляд, модернизация секстанов и службы времени на судне. Созданием дистанционных передач отсчетов секстана и моментов наблюдений и ввода их в ЭВМ в настоящее время занято несколько фирм, и, по-видимому, скоро появятся новые устройства. Уже выпущены новые секстаны с цифровым отсчетным устройством, например американский секстан «Марк-3». Кроме того, разрабатываются секстаны с трубами для ночных наблюдений, в том числе с телевизионной системой, а также с электронными отсчетными устройствами. Все это расширит возможности астрономических наблюдений и их обработки и позволит включить астронавигационные методы в автоматизированное судовождение.
492