

- •Введение
- •Глава 2. Параллактический треугольник светила и его решение
- •§4. Параллактический треугольник и его решение по основным формулам
- •§5. Вычисление высоты и азимута светила по системам формул
- •§7. Разложение высоты и азимута в ряд Тейлора. Теория таблиц численного типа
- •§1. Небесная сфера
- •§2. Системы сферических координат
- •§3. Графическое решение задач на небесной сфере
- •Глава 3. Видимое суточное движение светил. Изменение координат светил
- •§9. Характеристика суточного движения светил
- •§10. Явления, связанные с суточным движением светил
- •§11. Изменение координат светил вследствие видимого суточного движения
- •Глава 4. Обращение Земли вокруг Солнца. Видимое движение Солнца и изменение его координат
- •§13. Обращение Земли по орбите и видимое годовое движение Солнца
- •§14. Изменение экваториальных координат Солнца в течение года
- •Глава 5. Орбитальное и видимое движение планет, Луны и искусственных спутников
- •§18. Фазы и возраст Луны
- •§21. Орбитальное движение искусственных спутников
- •Глава 6. Измерение времени
- •§22. Основы измерения времени
- •§23. Звездные сутки. Звездное время. Основная формула времени
- •§26. Поясное, декретное, летнее, московское и стандартное времена, их связь с местной системой
- •§28. Понятие о точных шкалах времени
- •Глава 7. Вычисление видимых координат светил. МАЕ
- •§31. Понятие о вычислении видимых координат светил на ЭВМ
- •§32. Устройство таблиц МАЕ для расчета часовых углов и склонений светил
- •§33. Определение времени кульминации светил
- •§34. Обоснование расчета времени видимого восхода (захода) Солнца и Луны и времени сумерек
- •§35. Определение времени восхода и захода Солнца и Луны и времени сумерек по МАЕ
- •Глава 8. Измерители времени. Судовая служба времени
- •Глава 9. Звездное небо. Звездный глобус
- •§42. Устройство звездного глобуса, его установка. Понятие о других пособиях
- •§43. Решение задач с помощью звездного глобуса
- •Глава 10. Секстан
- •§44. Основы теории навигационного секстана
- •§45. Устройство навигационных секстанов
- •§46. Понятие об инструментальных ошибках секстана и их учете
- •§47. Понятие о секстанах с искусственным горизонтом
- •Глава 11. Наблюдения с навигационным секстаном
- •§48. Выверка навигационного секстана на судне
- •§50. Приемы измерения высот светил над видимым горизонтом
- •§53. Наклонение видимого горизонта. Наклонение зрительного луча
- •§55. Общий случай исправления высот светил, измеренных над видимым горизонтом
- •§56. Частные случаи исправления высот светил
- •§57. Приведение высот светил к одному зениту (месту) и одному моменту
- •§58. Определение средних квадратических ошибок поправок и измерения углов
- •§59. Определение средней квадратической ошибки измерения высот светил в море
- •Глава 13. Астрономическое определение поправки компаса
- •§60. Основы астрономического определения поправки компаса
- •§62. Пеленгование светил. Точность поправки компаса
- •§63. Определение поправки компаса. Общий случай
- •Глава 14. Теоретические основы определения места судна по светилам
- •§65. Общие принципы астрономического определения места
- •§67. Метод линий положения. Высотная линия положения
- •§72. Ошибки в высотной линии. Оценка ее точности и вес
- •Глава 16. Методы отыскания места судна и оценки его точности при наличии ошибок в высотных линиях
- •Глава 17. Определение места по одновременным наблюдениям светил. Общий случай
- •§76. Особенности определения места по одновременным наблюдениям светил
- •§77. Общий случай определения места по звездам
- •§78. Определение места днем по одновременным наблюдениям Луны и Солнца
- •§79. Определение места днем по одновременным наблюдениям Венеры и Солнца
- •§80. Определение места по одновременным наблюдениям Венеры, Луны и Солнца
- •Глава 18. Определение места судна по разновременным наблюдениям Солнца
- •§81. Особенности определения места по разновременным наблюдениям Солнца
- •§82. Влияние ошибок счисления и наивыгоднейшие условия для определения места по Солнцу
- •§83. Определение места по Солнцу в общем случае
- •§84. Определение места комбинированием навигационных и астрономических линий положения
- •Глава 19. Ускоренные способы обработки наблюдений
- •§86. Обзор приемов ускорения обработки наблюдений
- •§87. Прием перемещения счислимого места
- •§88. Определение места с предварительной обработкой (предвычислением) линий положения
- •§92. Решение астрономических задач на клавишных ЭВМ
- •Глава 20. Частные методы определения координат места судна
- •§93. Определение широты места по меридиональной и наибольшей высотам Солнца. Понятие о близмеридиональных высотах
- •§96. Определение координат места в малых широтах по соответствующим высотам Солнца
- •§97. Графический способ определения места при высотах Солнца, больших 88°
- •§98. Особенности определения места в высоких широтах
- •Глава 21. Перспективы развития методов астрономических определений в море. Краткий исторический очерк
- •§99. Понятие об астронавигационных системах и навигационных комплексах
- •§100. Краткий очерк истории мореходной астрономии
- •Список литературы
больших высотах и перемещенном месте в перенос надо вводить поправку х (см. график, рис. 124) или решать последовательными приближениями.
2.При прокладке на меркаторской карте в Ас надо вводить двойную ортодромическую поправку 2ψ, но только в высоких широтах и в средних – при использовании перемещенного места.
3.Ошибки метода ВЛП можно устранять решением последовательными приближениями. Этот прием применен в ЭВМ.
§72. ОШИБКИ В ВЫСОТНОЙ ЛИНИИ. ОЦЕНКА ЕЕ ТОЧНОСТИ И ВЕС
Элементы высотной линии положения, т.е. n=h–hc и А, как и любые результаты измерений и вычислений, содержат ошибки. Рассмотрим ошибки в линии после введения всех поправок и выполнения вычислений, но до уравнивания обсервации, т.е. до выбора места в фигуре ошибок.
В теории все ошибки (погрешности)1 по действию на результат разделяются на: промахи – просчеты, грубые ошибки, иногда допускаемые наблюдателем на любом этапе обсервации; систематические ошибки (∆), меняющиеся по определенному закону, например, постоянные в линиях данной обсервации; случайные ошибки – неизбежные ошибки в измерениях и вычислениях, возникающие от многих причин; они характеризуются дисперсиями или средними квадратическими ошибками (точностью) ±m.
Промахи. В астронавигации наибольшую опасность представляют промахи в наблюдениях или расчетах, так как они могут далеко отбросить обсервованное место от истинного и привести к аварии. Они чаще появляются в простых операциях: сложении, определении знака и др., где внимание снижено. По опытным данным, до 30% линий у нетренированных наблюдателей содержат промахи (чаще небольшие), поэтому выявление промаха – одна из
1 В судовождении сохранен термин «ошибка», равноценный – «погрешность», рекомендованный ГОСТ
16263—70.
340

первых забот штурмана. Более грубые промахи могут быть выявлены после сравнения полученного переноса с критерием, т.е. предельно возможным переносом, равным ожидаемой невязке счисления. Промахи же в пределах этого критерия (мелкие промахи) могут быть выявлены только после прокладки четырех или более линий – по анализу их взаимного расположения; этот анализ рассмотрен в §75.
Критерии промаха в ВЛП. Так как n=h—hc представляет как бы смещение линии из счислимого в обсервованное место, то величина n не должна значительно превышать совокупность ошибок счисления и линии, поэтому различные суммы и принимались за критерии промаха1. В предлагавшихся критериях не учитывались систематические ошибки, поэтому более правильным критерием является
nПР |
≤ 3 1 Мс2 + mn2 + ∆ПР ; |
(238) |
|
2 |
|
n ≤ nПР |
|
|
где Мс– средняя квадратическая ошибка счислимого места [см. формулы |
||
(277)]; |
|
|
mn – средняя квадратическая ошибка ВЛП [см. формулу (239)]; |
|
|
∆ДП – предельное значение |
возможной систематической |
ошибки |
(табл.10). |
|
|
Например, при Мс=±5'; mп=±1'; ∆пр=3' получим nпр=15' и большие переносы отбрасываются.
Крупные (в несколько градусов) промахи выявляются без формул по несовместимости с другими переносами. Формула же (238) может быть применена при средних промахах, кроме случаев неожиданных крупных невязок в счислении. Более совершенный критерий промаха в ВЛП получается после предварительной прокладки всех линий и приближенного выбора места М0; тогда
n' − n ≤ 3m |
n |
+ ∆ |
ПР |
(238') |
i i |
|
|
1 Труды ЦНИИМФа, Л., вып. 131, 1970 г., с. 33. 200
341
где n'i – переносы, снятые для М0.
Эти критерии можно применить в ЭВМ, где всегда требуется предварительная «отбраковка» линий.
Систематические ошибки. Источниками систематических ошибок в линиях являются расхождения теоретических и паспортных поправок с действительными, ошибки при измерении высоты (см. табл. 10), а также небольшие промахи при определении какой-либо поправки. Систематическая ошибка может быть одинаковой (повторяющейся) во всех линиях, если она появилась в одной из общих поправок. Так, если табличное наклонение горизонта не соответствует действительному, то во всех линиях появится постоянная ошибка ∆d. Кроме того, в линиях всегда есть малые (в пределах точности определения поправок) систематические ошибки, представляющие сумму индивидуальных значений ошибок поправок. Например, i по горизонту определяется с точностью ±0,4'; конкретная для данной i ошибка u=—0,3' войдет во все линии как ∆=—0,3', аналогично для d и одинаковых s. Также постоянна личная ошибка наблюдателя (обычно менее 0,2'). В других случаях систематическая ошибка в линиях разная, например, от наклона секстана при большой высоте.
При правильной постановке наблюдений и их обработки систематических ошибок, больших точности определения поправок, быть не должно, но в реальной морской обстановке они часто появляются. Обычно наклономер отсутствует, формуляры секстанов устаревают, бывают промахи и в линиях появляются ∆. Поэтому штурману надо предполагать, что в линии может быть ∆, и всегда принимать меры к ее исключению. Это требует избыточных наблюдений и усложнения их обработки, но необходимо для повышения надежности обсервации. Надежность характеризуется вероятностью отсутствия промаха и значительной систематической ошибки, а также достаточной точностью результата [11].
342

|
|
|
|
|
|
Таблица 10 |
||
Источники ошибок в ВЛП и величины ошибок |
|
|
||||||
|
|
|
Средние |
|
|
|||
Получаемая величина |
Способ получения |
|
Источники |
|
||||
|
|
|
|
квадратические |
систематических |
|||
|
|
|
|
ошибки (m) |
ошибок, предельные |
|||
|
|
|
|
измерений или |
величины ошибок ∆. |
|||
|
|
|
|
вычислений |
Значение в разных |
|||
|
|
|
Солнце |
|
линиях |
|
||
ОС |
Измеряют |
над |
Звезды |
Возможна ошибка от |
||||
|
видимым |
горизонтом |
±0,3—0,5' |
±0,4—0,7' |
наклона секстана при |
|||
|
секстанами: |
|
±0,4—0,6' |
±0,5—0,8' |
большой высоте; |
|||
|
СНО-Т |
|
|
|
|
наблюдалась от 0 до |
||
|
СНО-М |
|
|
|
|
+3', односторонняя, |
||
|
|
|
|
(при |
плохой |
разная в линиях. |
||
|
|
|
|
видимости |
горизонта |
Личная ошибка до |
||
|
|
|
|
до ±2') |
|
0,2'. |
|
|
|
|
|
|
|
|
Возможна |
|
|
|
|
|
|
|
|
систематическая |
||
|
|
|
|
|
|
ошибка при |
|
|
|
|
|
|
|
|
измерениях над |
|
|
|
|
|
|
|
|
лунным горизонтом от |
||
|
|
|
|
|
|
4- 1 до– 2', переменная |
||
|
|
|
|
|
|
в зависимости от |
||
|
|
|
|
|
|
∆Ae,* |
|
|
l |
Измеряют: |
|
|
|
|
|
|
|
|
по Солнцу |
|
|
±0,1' |
|
|
|
|
|
звезде |
|
|
±0,1—0,2' |
— |
|
|
|
|
горизонту |
|
|
±0,3—0,5' |
|
|
|
|
S |
Лабораторные данные |
|
±0,1—0,3' |
Возможна |
∆s |
от |
||
|
|
|
|
|
|
изменений s |
и |
от |
|
|
|
|
|
|
пренебрежения |
S2 |
|
|
|
|
|
|
|
барабана; |
порядка |
|
|
|
|
|
|
|
±0,5' (старые ±1,0'). |
||
|
|
|
|
|
|
Разная |
|
|
|
|
|
±0,1' |
|
||||
d |
По таблицам |
|
Возможно отклонение |
|||||
|
|
|
|
|
|
от табличного |
∆d. |
|
|
|
|
|
|
|
Обычно меньше |
1', |
|
|
|
|
|
|
|
предельное |
2– |
3'. |
|
|
|
|
|
|
Одинаковая |
|
|
|
|
|
±0,2' |
|
|
|
||
|
Измерением (Н-5, НК) |
|
|
|
|
|||
|
|
|
±0,1—0,2' |
|
||||
∆h=р+р+R+••• |
По МТ— 75, |
|
Возможны ∆р при |
|||||
|
ВАС—58 |
|
|
|
малых высотах |
|
||
|
|
|
|
|
|
Солнца и ∆h Луны (до |
||
|
|
|
|
|
|
0,3') |
|
|
343
hc |
По таблицам (см. |
±0,1-0,2' |
|
табл. 2) |
|
|
По навигационной |
±0,1" |
|
ЭВМ |
|
|
|
±0,1' |
АС |
По МТ, ТВА и ЭВМ |
|
|
По ВАС— 58 |
±0,1° |
В редких случаях возможна ∆hТ от ошибки в поправке хронометра или общей ошибки во
времени. Разная во всех ВЛП [см. формулу (264)]
Практически
несущественна
Статистическая оценка возможных систематических ошибок.
Конкретное значение систематической ошибки в данных наблюдениях может быть выявлено и исключено только после обсервации, между тем в некоторых задачах надо знать ожидаемый порядок этой ошибки до или в процессе обработки. Это требуется при выборе наивыгоднейших условий наблюдений, при обработке на ЭВМ, при оценке точности места, если данных для исключения ∆ недостаточно, и др. В этих случаях в последнее время применяется статистическая оценка величины возможных систематических (повторяющихся) ошибок. Из экспериментов последних десятилетий установлено, что отклонения поправок от табличных значений во всей совокупности наблюдений проявляются как случайные ошибки; они имеют пределы, разные знаки и чаще малы. Это дало возможность устаневить законы их распределения, дисперсии и средние квадратические значения:
—для наклонения горизонта md=±0,6';
—для поправок s секстанов СНО ms=±0,4—0,6';
—для поправок s секстанов СНО-Т m3=±0,3' (предварительное значение). В среднем возможная СКО поправок, определяемая формулой
m∆=  mi2 + ms2 + bd3
mi2 + ms2 + bd3
получена из экспериментов и составляет: по официальным данным m∆=±0,7'; по данным проф. Р.А.Скубкотд от 0,3 до 2' (в разных районах и условиях); по данным автора, для СНО-Т=m∆=±0,4'. Исследование систематических ошибок показало, что при современном уровне
344

астронавигации их величины в ВЛП могут быть сведены к минимуму порядка 0,5' и что их величины в рядовой обсервации очень редко превышают 2—3'.
Случайные ошибки в переносе. Случайные ошибки в составляющих переноса характеризуются СКО, показанными в табл. 10, в которой даны величины ошибок, полученные из обобщения опыта последнего времени; их можно применять для априорной оценки mn (см. §59), но с учетом своих личных данных.
Суммарная случайная ошибка mn в переносе определяется по формуле
mn = |
m2 |
(239) |
oc + mобр2 |
||
|
N |
|
где mобр– СКО обработки наблюдений, включающая точность получения поправок и точность вычислений.
В среднем ошибки обработки mобр=±0,2–0,3', а mOC=±0,5––0,7'; при этих данных анализ формулы (239) показывает, что:
—точность линии зависит в основном от более крупной ошибки mос;
—увеличивать число наблюдений в серии свыше пяти нет смысла, так как точность mn линии повышается мало;
—увеличивать точность обработки mобр при больших moc нет смысла; достаточным соотношением является mобр: mос≤0,5, так как точность линии остается прежней.
Принимая ошибку обработки mобр (см. табл. 10) порядка ±0,3'; ошибку наблюдений Солнца mос=±0,5' и звезд ±0,7', при трех высотах в серии получим следующие ожидаемые с вероятностью 68% ошибки в линиях: для Солнца mп=±0,5'; для звезд mn=±0,6'.
Ошибка для звезд приведена меньшей, чем обычно указывается в литературе (±0,9'), так как при рекомендуемых наблюдениях в гражданские сумерки (см. §76) точность измерения высот звезд мало отличается от измерения высот Солнца.
Уравнение полосы положения. В §68 выведено уравнение (227)
ошибочной линии, т.е. уравнение высотной линии, смещенной под действием
345
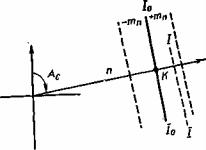
ошибок ∆h. Переходя к конкретным ошибкам, получим, что систематическая ошибка (и промах) вызывает параллельное смещение линии на величину ошибки ∆, а величина m дает полосу положения, внутри которой с определенной вероятностью находится истинная линия. Величины ∆ или промахи будем вводить в уравнение ВЛП в конкретных задачах, так как их может и не быть. Поэтому уравнение реального положения судна представляет уравнение полосы положения, которое, в координатах ∆φ и ∆W относительно счислимого места Мс, имеет вид
∆φ cos A+∆W sin A=n ± mn. (240)
На рис. 126 при обсервованной линии I0– I0 построим полосу ±m. Внутри этой полосы, с вероятностью 68%, находится действительная линия положения
I– I.
Рис. 126
Следовательно, высотную линию нужно всегда представлять себе в виде полосы положения, в которой находится действительная линия (если: исключена систематическая ошибка и нет промаха) со следующей вероятностью:
—68%– при ширине полосы 2mn т.е. при ±mn;
—95%– при ширине полосы 4 mn, т.е. при ±2mn;
—99%– при ширине полосы 5mn, т.е. при 2,5mn
Обычно достаточной является вероятность 68%; в ответственных случаях следует принять полосу в ±2mn с вероятностью примерно 95%.
Вес высотной линии положения. При оценке точности данной линии положения и степени доверия к ней, при сравнении ее с другими линиями
346

m2
применяется понятие веса линии положения (Р= 1 ). Для высотной линии при mn2
g=1 имеем:
Р= |
C |
или Р= |
m2 |
(241) |
|
|
1 |
||||
mn2 |
mn2 |
||||
|
|
|
где m1 – СКО, принятая для сравнения, например в первой линии или С=1
и т.п.
Следовательно, вес – это условная, относительная величина. Чем больше ошибка mn, тем меньше вес линии относительно принятой за основную, и наоборот, при малой ошибке вес линии больше.
347