

∆А=С[tgh sin(A+AСH)—sin AСН tg φ] |
(203) |
Знаки в скобках будут обратными при ∆λW.
Если принять ошибки счисления, т.е. невязку С=6– 7'≈0,1о, то при h≤18о в малых широтах ошибка ∆А меньше 0,1°, в широтах до 60° ошибка в азимуте не превысит 0,25°, т.е. точности пеленгования, в высоких же широтах φ=70÷75° при этих же условиях ошибка достигает 0,4°.
Из приведенного анализа можно сделать следующие выводы:
—ошибки в счислимых координатах меньше всего сказываются на вычисляемом азимуте, если светило расположено на малой высоте до 18—20°; это и является наивыгоднейшим условием расположения светила для определения ∆К;
—при обычных условиях плавания, если ошибки счисления не превышают 10', вычисленный азимут Ас можно считать практически равным АИ светила; в высоких широтах требования к точности координат должны быть выше– до ±3', т.е. при вычислениях желательно применять обсервованные координаты;
—в малых северных широтах выгодным объектом для определения ∆К является Полярная звезда, азимут которой мало зависит от ошибок координат;
—при соблюдении рекомендаций средняя квадратическая ошибка в азимуте вследствие ошибок координат не превысит ±0,1°.
§67. ПЕЛЕНГОВАНИЕ СВЕТИЛ. ТОЧНОСТЬ ПОПРАВКИ КОМПАСА
О проверке репитера и пеленгатора. Как всякий измерительный прибор, пеленгаторный репитер и пеленгатор должны быть предварительно выверены. Выверка репитера и пеленгатора производится до выхода в море (см. [2], с.217). В море можно проверить только сходимость отсчетов путем сличения курсов и пеленгов по разным репитерам; это и следует проделать до определения поправки.
289
Проверка пеленгатора ПГК-2. После установки на репитер пеленгатора проверяют его вращение, исправность деталей, качество изображения картушки, ориентиров и пузырька уровня с соответствующей регулировкой, проверяют откидное зеркало и светофильтры, протирают оптику. Установка откидного зеркала ПГК-2 по техническим условиям произведена до ±0,05°, но при нарушениях появляется ошибка. Выявить ее можно последовательными определениями ∆K без зеркала и по другому светилу – с зеркалом; это можно проделать в хороших условиях.
Исключение постоянной погрешности гирокомпаса. На стоянке, до выхода в рейс, после прихода гирокомпаса в меридиан, определяют 3—5 поправок ∆ГK' по светилам (через 15—20м). Образовав среднее, получают ∆KГП и поворотом основного прибора доводят ее до нуля (±0,2°).
Выполнение пеленгования. Для пеленгования подбираются светила с высотой 0—10° (до 20°). Пеленгование выполняют совмещением нити пеленгатора с центром светила, одновременно наклоном пеленгатора «вбок», на нить приводят пузырек уровня. Когда на нити окажутся светило и пузырек, по ней же одновременно производят отсчет КП, а по секундомеру замечают момент до 1с (практически достаточно до–5—10с). Пузырек уровня служит для удержания визирной плоскости пеленгатора в плоскости вертикала светила, поэтому пеленгатор можно наклонять «на себя» на 10—20° для прямого наведения на светило, но пузырек, при этом должен быть точно на нити. При высотах Солнца, больших 30° (до 45°), применяется откидное зеркало; оно дает отражение светила, которое и пеленгуется – обязательно с приведением середины пузырька на нить; обычно зеркало дает дополнительную ошибку. Следует наблюдать не один, а три пеленга светила и брать среднее из КП и Гскм. Вместо этого можно производить несколько последовательных «прицеливаний», пока не получится устойчивый результат; при последнем наведении замечают КП и Т.
На качке одновременное совмещение светила и пузырька и взятие отсчета требуют большой тренировки; это может быть выполнено лучше по светилу
290
вблизи горизонта.
Для получения ∆К в сомнительных случаях следует наблюдать КП второго светила с другого репитера.
Ошибки компасного пеленга. Источниками ошибок в КП являются ошибки прибора и ошибки взятия пеленга.
Ошибки прибора возникают от:
—погрешностей курсоуказания самого центрального прибора, показывающих отклонения компасного меридиана от истинного и рассмотренных ниже;
—погрешности установки репитера, эксцентриситета и люфта пеленгатора, погрешности установки призмы и зеркала, дающие отклонения компасного пеленга от компасного меридиана.
При регулярном выполнении проверок индивидуальные значения этих ошибок в КП±0,2–0,3° с вероятностью 68%. Однако ошибка в пеленге от применения зеркала меняется в функции от tgh, поэтому при больших высотах небольшие нарушения ее установки приводят к значительным ошибкам и при h>45° применять зеркало не рекомендуется.
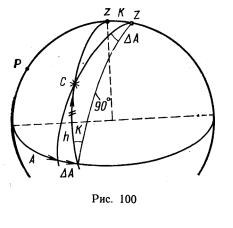
Ошибки взятия пеленга возникают от наклона визирной плоскости пеленгатора (рис. 100), ошибок наведения и отсчета и их неодновременности. Основная ошибка возникает от наклона визирной плоскости пеленгатора. Она выражается формулой
291
∆А=К tg h |
(204) |
где К– угол наклона пеленгатора (см. рис. 100). При |
удержании |
пеленгатора по уровню на стоянке К=0,25°, на ходу—примерно 0,5°. При высотах до 20° эта ошибка попадает в пределы m=±0,2°. Для неопытного штурмана характерна ошибка от неодновременности наведения и отсчета. Для ее уменьшения требуется регулярная тренировка в измерении КП.
От всех перечисленных причин в полученный КП войдет индивидуальная ошибка v, которая далее войдет и в ∆К. В среднем, при соблюдении рекомендаций, она характеризуется величиной СКО относительно компасного меридиана:
mКП' =  mИНСТР2 + mИЗМЕР2 = ±0,3о (205)
mИНСТР2 + mИЗМЕР2 = ±0,3о (205)
Точность самого курсоуказания одиночным гирокомпасом, по официальным данным, зависит от условий и режима плавания и колеблется в пределах mгк=±0,3— 1,5° (в среднем примем ±0,5°). Сравнивая эту величину с m'кп, видим, что ошибка КП светила меньше точности курсоуказания, т.е.
ошибки гирокомпаса превалируют над ошибками КП. |
|
Ошибка КП относительно истинного меридиана составит |
|
mКП = mГК2 + mКП'2 = ±0,60 |
(206) |
Точность определения мгновенной поправки компаса. Средняя квадратическая ошибка поправки компаса включает все перечисленные источники и может быть подсчитана по формуле
|
|
|
|
m∆К = mИП2 + mКП'2 |
(207) |
|
где |
m2 |
= m2 |
+ m2 |
включает ошибки в А от координат и ошибки (m |
) |
|
|
ИП |
А |
ВЫЧ |
c |
|
выч |
вычислений по таблицам, формулам или приборам.
В §61 мы установили, что в средних условиях mА от ошибок счисления составит mА≤±0,1°. Таблицы ВАС– 58 дают точность вычисления азимута
±0,1°, таблицы ТВА— 57±0,1'; формула ctg А дает ±0,05'.
Таким образом, наибольшую ошибку вычислений дают таблицы ВАС– 58, и для них имеем:
292