

- •Введение
- •Глава 2. Параллактический треугольник светила и его решение
- •§4. Параллактический треугольник и его решение по основным формулам
- •§5. Вычисление высоты и азимута светила по системам формул
- •§7. Разложение высоты и азимута в ряд Тейлора. Теория таблиц численного типа
- •§1. Небесная сфера
- •§2. Системы сферических координат
- •§3. Графическое решение задач на небесной сфере
- •Глава 3. Видимое суточное движение светил. Изменение координат светил
- •§9. Характеристика суточного движения светил
- •§10. Явления, связанные с суточным движением светил
- •§11. Изменение координат светил вследствие видимого суточного движения
- •Глава 4. Обращение Земли вокруг Солнца. Видимое движение Солнца и изменение его координат
- •§13. Обращение Земли по орбите и видимое годовое движение Солнца
- •§14. Изменение экваториальных координат Солнца в течение года
- •Глава 5. Орбитальное и видимое движение планет, Луны и искусственных спутников
- •§18. Фазы и возраст Луны
- •§21. Орбитальное движение искусственных спутников
- •Глава 6. Измерение времени
- •§22. Основы измерения времени
- •§23. Звездные сутки. Звездное время. Основная формула времени
- •§26. Поясное, декретное, летнее, московское и стандартное времена, их связь с местной системой
- •§28. Понятие о точных шкалах времени
- •Глава 7. Вычисление видимых координат светил. МАЕ
- •§31. Понятие о вычислении видимых координат светил на ЭВМ
- •§32. Устройство таблиц МАЕ для расчета часовых углов и склонений светил
- •§33. Определение времени кульминации светил
- •§34. Обоснование расчета времени видимого восхода (захода) Солнца и Луны и времени сумерек
- •§35. Определение времени восхода и захода Солнца и Луны и времени сумерек по МАЕ
- •Глава 8. Измерители времени. Судовая служба времени
- •Глава 9. Звездное небо. Звездный глобус
- •§42. Устройство звездного глобуса, его установка. Понятие о других пособиях
- •§43. Решение задач с помощью звездного глобуса
- •Глава 10. Секстан
- •§44. Основы теории навигационного секстана
- •§45. Устройство навигационных секстанов
- •§46. Понятие об инструментальных ошибках секстана и их учете
- •§47. Понятие о секстанах с искусственным горизонтом
- •Глава 11. Наблюдения с навигационным секстаном
- •§48. Выверка навигационного секстана на судне
- •§50. Приемы измерения высот светил над видимым горизонтом
- •§53. Наклонение видимого горизонта. Наклонение зрительного луча
- •§55. Общий случай исправления высот светил, измеренных над видимым горизонтом
- •§56. Частные случаи исправления высот светил
- •§57. Приведение высот светил к одному зениту (месту) и одному моменту
- •§58. Определение средних квадратических ошибок поправок и измерения углов
- •§59. Определение средней квадратической ошибки измерения высот светил в море
- •Глава 13. Астрономическое определение поправки компаса
- •§60. Основы астрономического определения поправки компаса
- •§62. Пеленгование светил. Точность поправки компаса
- •§63. Определение поправки компаса. Общий случай
- •Глава 14. Теоретические основы определения места судна по светилам
- •§65. Общие принципы астрономического определения места
- •§67. Метод линий положения. Высотная линия положения
- •§72. Ошибки в высотной линии. Оценка ее точности и вес
- •Глава 16. Методы отыскания места судна и оценки его точности при наличии ошибок в высотных линиях
- •Глава 17. Определение места по одновременным наблюдениям светил. Общий случай
- •§76. Особенности определения места по одновременным наблюдениям светил
- •§77. Общий случай определения места по звездам
- •§78. Определение места днем по одновременным наблюдениям Луны и Солнца
- •§79. Определение места днем по одновременным наблюдениям Венеры и Солнца
- •§80. Определение места по одновременным наблюдениям Венеры, Луны и Солнца
- •Глава 18. Определение места судна по разновременным наблюдениям Солнца
- •§81. Особенности определения места по разновременным наблюдениям Солнца
- •§82. Влияние ошибок счисления и наивыгоднейшие условия для определения места по Солнцу
- •§83. Определение места по Солнцу в общем случае
- •§84. Определение места комбинированием навигационных и астрономических линий положения
- •Глава 19. Ускоренные способы обработки наблюдений
- •§86. Обзор приемов ускорения обработки наблюдений
- •§87. Прием перемещения счислимого места
- •§88. Определение места с предварительной обработкой (предвычислением) линий положения
- •§92. Решение астрономических задач на клавишных ЭВМ
- •Глава 20. Частные методы определения координат места судна
- •§93. Определение широты места по меридиональной и наибольшей высотам Солнца. Понятие о близмеридиональных высотах
- •§96. Определение координат места в малых широтах по соответствующим высотам Солнца
- •§97. Графический способ определения места при высотах Солнца, больших 88°
- •§98. Особенности определения места в высоких широтах
- •Глава 21. Перспективы развития методов астрономических определений в море. Краткий исторический очерк
- •§99. Понятие об астронавигационных системах и навигационных комплексах
- •§100. Краткий очерк истории мореходной астрономии
- •Список литературы

Глава 14
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА ПО СВЕТИЛАМ
§65. ОБЩИЕ ПРИНЦИПЫ АСТРОНОМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТА
Для земного наблюдателя исходным направлением является направление его поля тяготения, т.е. направление его отвесной линии. Поэтому для определения места наблюдателя на Земле надо определить положение отвесной линии в пространстве и найти точку пересечения ее с поверхностью Земли; координаты этой точки и представят географические координаты места судна. При построении сферы отвесная линия О1М (рис. 103) переносится параллельно в центр сферы1 О и проектируется на сферу в точку zм зенита, который и представит положение отвесной линии данного наблюдателя. Задача определения места сведется теперь к определению положения зенита относительно мест светил с последующим переходом обратно на поверхность Земли.
Связь между местом судна и положением его зенита. Зенит представляет проекцию на небесную сферу места наблюдателя М на геоиде, полученное построением при центре сферы линии OzM (см. рис. 103), параллельной отвесу O1M наблюдателя М. Географические координаты φ и λ этого наблюдателя и небесные координаты его зенита δZ и еГРz связаны соотношениями, вытекающими из рис. 103. Угол О равен углу Ог1 по построению, т.е. φ=δz. Долгота места λ равна дуге Е0Е небесной сферы (дуга, измеряющая двугранный угол λ). Дуга Е0Е, равная λ, может быть получена как
1 По отвесной линии определяется астрономическая широта, по нормали к референцэллипсоиду – геодезическая, в которой строятся карты. Ввиду малого их различия в море (менее 3") введены обобщающие – географические координаты φ и λ
306

разность S |
– S |
Г |
или t* |
−t* |
. Следовательно, |
|
|
M |
|
M |
ГР |
|
|
|
|
|
|
|
|
|
ϕ =δz |
|
(214) |
|
|
|
|
|
λ = SM − SГР =tМ − t |
|
|
|
|
|
|
|
ГР |
|
т.е. географическая широта места наблюдателя равна геоцентрическому склонению его зенита, а географическая долгота места – разности времен SM– SГР. Вследствие суточного вращения сферы место зенита непрерывно перемещается по параллели, а при перемещении наблюдателя – и в направлении его движения, поэтому при наблюдениях должно получаться мгновенное место зенита на замеченный момент Тгр. Если в частном случае какое-либо светило F (см. рис. 103) может проходить через зенит места, то в момент его верхней кульминации имеем h=90° и tм=0, откуда
φ=δ* λ=tГР* (214')
т.е. географические координаты места равны геоцентрическим координатам светила при h=90°. Этот частный случай – простейшее определение места по наблюдениям светила.
Принципы определения места зенита. Для определения мгновенного места зенита z и, следовательно, места судна необходимо иметь данные измерений о его расположении относительно мест двух светил C1 и С2 (рис. 104) или одного C1. B навигации физические величины U, являющиеся функциями координат φ и λ, называются навигационными параметрами:
U=f(φ; λ) |
(*) |
Для определения места по светилам надо измерить |
не менее двух |
307
навигационных параметров U1 и U2. Это могут быть: высоты или зенитные расстояния; скорости изменения высот; разности высот; сумма высот; азимуты; разности азимутов; скорости изменения азимутов; параллактические углы.
Можно измерять как два одинаковых параметра, так и различные их комбинации. При всех измерениях фиксируется также время (Тгр).
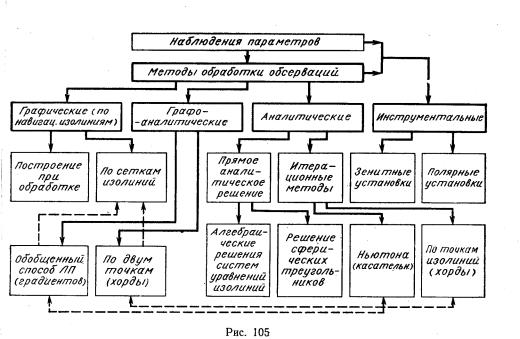
Из всех этих параметров современные инструменты позволяют измерять высоты светил, разности высот и разности азимутов. На транспортном флоте применяются пока только наблюдения высот, для выполнения которых имеется надежный и простой инструмент – секстан; в редких случаях применяется разность высот в варианте «соответствующих высот». Наблюденные навигационные параметры должны быть обработаны и полученное место судна нанесено на карту. Весь процесс наблюдений и их обработки часто называют астрономической обсервацией, а полученное место — обсервованным. Обработка наблюдений, т.е. определение места по измеренным параметрам, может быть выполнена следующими методами (рис. 105): графическим, графоаналитическим, аналитическим и инструментальным.
308
Графические методы обработки наблюдений. Графические методы основываются на принципе навигационных изолиний, т.е. линий на глобусе или карте, отвечающих равным значениям измеренного навигационного параметра. Если значение этого параметра U0 измерено на судне, то место судна находится на данной навигационной изолинии. Для получения места зенита на сфере или места на карте нужно построить не менее двух навигационных изолиний и иметь дополнительную информацию, например МС или другой параметр). Тогда в точке пересечения изолиний около Мс получается искомое место судна, другие точки пересечения отбрасываются.
В случаях простейших кривых, например если изолинии окружности, они строятся при обработке наблюдений; для сложных кривых сетки изолиний строятся заранее, например карты систем Декка, Лоран, астрографики и др. При обработке из множества кривых выбираются равные измеренным параметрам около счислимого места, т.е. навигационные изолинии.
Графоаналитические методы обработки наблюдений. В основе этих методов лежит принцип линий положения, представляющих касательные к изолиниям, уравнения которых получаются как первые члены разложения в ряд уравнения данной навигационной изолинии. При этом изолиния заменяется отрезком прямой, называемой линией положения. Данные для построения линий вычисляются аналитически, после чего линии прокладываются на карте и в точке их пересечения получается место судна. Линия положения может строиться либо как касательная, либо как хорда. В мореходной астрономии теперь применяется только метод касательных, а в навигации– оба метода.
Аналитические методы обработки наблюдений. По двум или более измеренным параметрам U1 и U2 составляются уравнения вида
U1=f(φ; λ) U2=f(φ; λ) (**)
Из этих уравнений можно определить обе искомые координаты φ и λ; если число уравнений больше двух, то задача решается способом наименьших квадратов и получаются уточненные– вероятнейшие– координаты φ и λ. Если выполнено одно наблюдение, то можно определить только одну координату φ
309
или λ, другая считается известной.
Возможны два пути решения уравнений (**): прямое аналитическое и итерационные методы. В случае измерения двух высот светил уравнения (**)
можно записать из треугольников РzСг и PzC2 (см. рис. 104): |
|
||||
sinh1 |
=sinϕsinδ1 |
+ cosϕcosδ1 cos(tГР' |
+ λ) |
(215) |
|
sinh2 |
= sinϕsinδ2 |
+ cosϕcosδ2 cos(tГР'' |
+ λ) |
||
|
|||||
Определение φ и λ по высотам двух светил носит название «задачи двух высот», и ее решению посвящено много работ XVIII—XIX вв. и особенно в последнее время в связи с появлением ЭВМ.
Прямое аналитическое решение задачи двух высот выполняется либо путем алгебраического решения системы уравнений (215), либо путем последовательного решения трех сферических треугольников (см. рис. 104);одно из таких решений было дано Гауссом в 1808 г. Многочисленные варианты прямого аналитического решения слишком сложны для «ручных» вычислений и привлекли внимание только после появления ЭВМ.
Итерационные методы аналитического решения задачи двух (и более)
высот представляют решения уравнений (215) или производных от них методами последовательных приближений. Обычно применяются два варианта решений: методом касательных (Ньютона) и методом последовательного вычисления координат точек изолиний.
Метод касательных представляет аналитический вариант метода линий положения. Уравнение (215) изолинии разлагают в ряд Тейлора и берут первые члены ряда. Решая два таких уравнения, получают и далее φ'=φс+∆φ и λ'=λс+∆λ. С этими координатами задача решается вторично и т.д. При обычных ошибках счисления достаточно одного приближения (редко двух). При большом числе наблюдений и уравнений применяют МНК или его обобщенный вариант и получают вероятнейшие φ и λ. Этот метод пригоден для любых линий положения и при любом их числе, почему и применен в большинстве действующих сейчас навигационных ЭВМ.
Во втором – методе последовательного вычисления координат точек
310

изолиний – в первое уравнение U1=sinh1 подставляют φс и вычисляют λ1 точки на U1, эта долгота подставляется в U2 и рассчитывается φ1 точки на ней и так далее, пока разность координаты с предыдущей не станет менее заданной величины.
Инструментальные методы определения места. Определение места наблюдателя можно выполнить надлежащей установкой прибора (системы) в пространстве с одновременной отметкой места зенита и времени. В этом случае наблюдения параметров и их обработка почти полностью совмещены. Возможны два варианта установок: зенитная и полярная. В зенитной установке места звезд на звездной карте 1 совмещают с направлениями на околозенитные звезды C1 и С2 (рис. 106, а) и по проекции отвесной линии (например, по уровню 2) замечают место зенита zМ; с рамок карты получают φ' и SM' и далее
λ= SM' –Sгр, где SГР вычисляется по полученному Тгр. В частном случае – при прохождении звезды через зенит – применяют формулы (214').
На этом принципе был основан ряд приборов, например «зенитомер» А.А. Михайлова (1944 г.), «Ночной определитель места» Л.Рандича (1956 г.); в измененном виде подобный принцип применен в двухзвездном секстане Хогга,
внавигационной системе GEON и др.
Вполярной установке места звезд на карте, помещенной в трубе (рис.106,б), совмещаются с околополярными звездами С1 и С2 и измеряется угол 90°–φ наклона трубы к отвесной линии zM, полученной, например, по уровню, и угол поворота точки Овна на карте от меридиана наблюдателя, т.е. SМ. Далее получают λ=SM–Sгр. На этом принципе предлагался ряд прибоов – гироширот, сферант и др.
Подобные приборы на транспортном флоте пока не применялись из-за
311

невозможности одновременных совмещений на подвижной платформе и неточности результата. Возможно, в автоматическом режиме их реализация окажется реальнее.
§66. ПРИМЕНЕНИЕ ИЗОЛИНИЙ В АСТРОНОМИИ. КРУГ РАВНЫХ ВЫСОТ
Каждому навигационному параметру на сфере, земной поверхности и карте соответствует изолиния, т.е. геометрическое место точек равных значений данной величины. Изолинию можно построить на сфере или карте или задать уравнением вида U=f(φ; λ), где U– навигационный параметр, постоянный для данной изолинии, φ и λ – текущие координаты точек изолинии. В мореходной астрономии могут применяться изолинии, приведенные, в табл.8.
Изолиния, соответствующая измеренному на судне параметру U0, называется навигационной изолинией, и на ней находится место судна. Одна из точек пересечения двух навигационных изолиний дает место судна. При этом для устранения неопределенности необходимо располагать дополнительной информацией (например, близостью к Мс, направлением и т.п.). Рассмотрим подробно изолинии высоты.
Полюс освещения и его координаты. Пусть на поверхность Земли,
независимо от ее формы, падает пучок параллельных лучей1 от светила В (рис. 107). Один из лучей ВO1 совпадает с направлением отвесной линии O1b. Точка b на Земле, в которой луч от светила пересекает земную поверхность по направлению отвесной линии (т.е. светило видно в зените), называется полюсом освещения. Другими словами, точка b– проекция светила по отвесной линии на земную поверхность, отсюда ее другое название – географическое место светила.
1 Непараллельность лучей (параллакс) устраняется при исправлении высот введением поправки ∆hР.
312
|
|
|
Таблица 8 |
|
|
|
|
№ |
Навигационный |
Изолиния |
Уравнение изолинии на сфере |
п/п |
параметр |
|
|
1 |
Высота (h) |
Круг равных высот |
sin h=sinφ sinδ+cosφ cosδ costM=cosz |
|
|
(сферическая |
|
|
|
окружность) |
|
|
|
|
|
2 |
Разность высот |
Сферическая |
∆z=агс cos zt– arc cos г. |
|
(∆z) |
гипербола |
|
|
|
|
|
3 |
Сумма высот (∑z) |
Сферический эллипс |
∑z=arc cosz1+arc cosz2 |
|
|
|
|
4 |
Скорость |
Высотная изоскора |
tgφ=ctgq sint secδ+tgδ cost; sinq=–ωhsecδ |
|
изменения высоты |
|
|
|
(ωh) |
|
|
5 |
Азимут (А) |
Изоазимута |
ctgA=cosφ tgδ cosect – sinφ ctgt |
|
|
|
|
6 |
Разность азимутов |
Сферическая изогона |
∆A=arc ctg A1– arc ctg A2; |
|
(∆A) |
|
∆A=A2— А1 |
7 |
Скорость |
Азимутальная изоскора |
tgφ=ctgq sint secδ + tgδ cost; |
|
изменения азимута |
|
cosq=ωА cosh ωA |
|
(ωА) |
|
|
|
|
|
cosδ |
8 |
Параллактический |
Ортодромия |
ctg q=tgφ cosδ cosect – sinδ ctgt |
|
угол (q) |
|
|
|
|
|
|
|
Географические координаты полюса освещения b представлены на рис. |
||
107: угол О1 между отвесной линией и плоскостью экватора – географическая широта φb; двугранный угол e0Od—между плоскостями гринвичского и данного меридиана – географическая долгота λb. Построим при центре Земли О небесную сферу и в ее центр перенесем отвесную линию bО1 получим направление 0В, параллельное лучам светила, и точку В – место светила на сфере; геоцентрические координаты светила δВ и tГРB' . Угол 01 равен углу О, а
двугранный угол e00d измеряется дугой сферы E0D, следовательно,
|
|
φ |
=δ |
В |
λ |
b |
= t В |
(216) |
|
|
b |
|
|
ГР |
|
||
т.е. географические координаты φb, λb |
полюса освещения на Земле равны |
|||||||
геоцентрическим координатам δВ, tГРB' светила на сфере. |
|
|||||||
Величины δ |
В |
и t B' , выбираются из МАЕ на данное Т , |
и по ним можно |
|||||
|
ГР |
|
|
|
|
гр |
|
|
нанести географическое место светила на карту или глобус. |
Так как tw всех |
|||||||
313

светил с течением времени непрерывно возрастают, то их полюса освещения перемещаются по Земле к западу со скоростью суточного вращения Земли.
Круг равных высот. Рассмотрим, как и выше, пучок параллельных лучей от светила В, падающих на поверхность Земли (рис. 108), имеющей форму геоида. Для наблюдателя M1 с отвесной линией М1z' светило В имеет высоту h или зенитное расстояние z. Наблюдатель в точке М2 также видит светило В на высоте h. На Земле можно найти еще множество точек Мi, в которых высота h имеет одно и то же значение.
Кругом равных высот называется геометрическое место точек земной поверхности, в которых данное светило в один и тот же момент находится на одинаковой высоте. Учитывая отклонения отвеса и форму Земли, круг равных высот на реальной земной поверхности представляет сложную кривую второго порядка. На поверхности же сферы без учета отклонений отвеса – это малый круг.
|
|
|
|
|
|
Рис. 107 |
|
Рис.108 |
На небесной сфере (см. рис. 108) с центром в точке О круг равных высот представляет геометрическое место зенитов z', z" наблюдателей, имеющих равные высоты. Так как при построении от направления луча OS при центре сферы следует откладывать равные зенитные расстояния z (или равные высоты h), то получается коническая поверхность, которая в сечении со сферой дает малый круг z'z" со сферическим радиусом z=90°–h и центром в месте светила В.
314
Следовательно, на небесной сфере круги равных высот представляют малые круги, кроме круга радиуса z=90°, представляющего большой круг. Если в первом приближении принять Землю за шар, то большой круг dd' (см. рис. 108), имеющий полюс в точке b' (полюс освещения для шара), представляет границу освещенности Земли данным светилом (h=0), отсуда термин — полюс освещения. Остальные круги равных высот представляют малые круги радиуса z=90°—h с центром в полюсе освещения. От точки b' до круга dd' высота светила изменяется от 90 до 0°, т.е. на 90°•60'=5400', а на земном шаре это расстояние — 5400 миль, следовательно, одна минута изменения высоты равна морской миле.
Если на судне измерить высоту светила, то среди множества кругов равных высот только один M1M2 соответствует измеренной высоте и на нем находится место наблюдателя. Следовательно, точной навигационной изолинией судна является круг равных высот, отвечающий измеренной на судне высоте светила. Однако только на поверхности сферы или земного глобуса круги равных высот можно строить как окружности радиуса z. На реальной поверхности Земли, а также на карте изолинии высот представляют более сложные кривые и их построение усложняется.
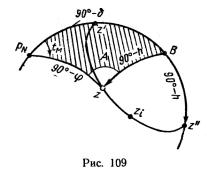
Уравнение круга равных высот на сфере. Возьмем на круге равных высот произвольную точку z (рис. 109) и построим для нее параллактический треугольник PNzB, в котором PNz=90°—φ и tM=tГР+λ. По формуле косинуса стороны Bz имеем
sinh=sin φi sinδ + cos φi cos δcos (tГР +λ) (217)
Применяя эту формулу для других точек zt круга, видим, что δ, tГР — текущие координаты точек круга. Если, не изменяя параметров, задаваться значениями одной из координат, положим λi то из уравнения (217) можно определить другую координату φi точек, лежащих на круге равных высот. Поэтому формулу (217) называют уравнением круга равных высот на сфере.
315
Уравнение круга равных высот на меркаторской карте. На карту в мер-каторской проекции круги равных высот переносятся с соответствием по нормалям и изображаются так называемыми циклическими кривыми трех типов (рис. 110). Уравнения их в координатах η и ξ, совпадающих с осями кривых, имеют следующий вид:
1 — для круга, не включающего полюс,
ch η =cos ξ1 ch d1; (218) II – для круга, проходящего через полюс,
e−η = cosξ1 |
(219) |
III – для круга, включающего полюс,
sh η=–cos ξ2 sh d2 (220)
где η и ξi – прямоугольные координаты на меркаторской проекции; di – полуоси кривых;
sh x ch x – гиперболические функции.
Кривые II и III типов, а также I для небольших высот имеют малую кривизну, что позволяет заменять их касательными в пределах 30 миль без заметных погрешностей (иногда с небольшими поправками).
Принцип определения места по кругам равных высот на земном глобус. Для определения места на земном глобусе надо измерить высоты двух светил и заметить Тгр. По полученным Тгр выбрать из МАЕ δ и tГР светил, которые по выражению (216) являются координатами полюсов освещения, т.е. цен ров кругов. Нанеся на глобус полюса освещения b1 и b2 (рис. 111),
316
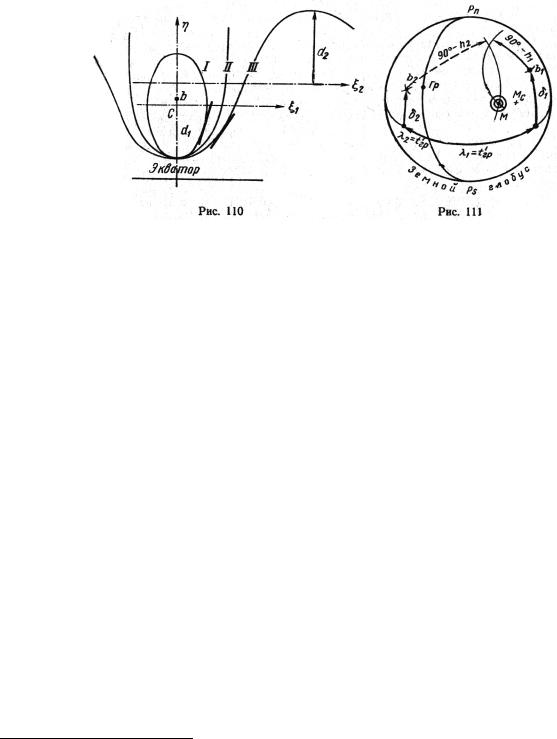
проводим из них дуги радиусами z1=90°—h1 и z2 в масштабе глобуса. В одной точек пересечения1 — ближайшей к М0 и получим место судна на глобу для решения с точностью до 1', диаметр глобуса должен быть около 7 м. Этот принцип определения применен практически только в одном случа при определении места в малых широтах (до 25°), по высотам Солнца, бол шим 88°. Здесь окружности можно строить на карте с погрешностями менее 0,5'.
Определение места по кругам равных высот на небесной сфере. Прок ведя наблюдения высот двух светил С1 и С2 (рис. 112, а) и заметив моменвремени, из мест светил на сфере проводим круги равных высот радиуса z1,и z2. В одной из точек пересечения их получим место зенита zм. В соответствии с равенствами (214) склонение зенита равно широте места, а сн на глобусе у меридиана наблюдателя (у точки Е) SM и рассчитав Sгр (по Тгр), получим λ=SM–Sгр. Подобный принцип определения места применен в астрографиках. При точном решении места светил С1 и С2 должно наноситься по δ и τ на момент наблюдений. На звездном глобусе эти места относятся к прошедшей эпохе, поэтому решение неточное.
1 Неопределенность разрешается двумя путями: близостью к Мс или измерением другого параметра, например азимута
317