

Часть III
АСТРОНАВИГАЦИЯ
Глава 13 АСТРОНОМИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ПОПРАВКИ КОМПАСА
§60. ОСНОВЫ АСТРОНОМИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОПРАВКИ КОМПАСА
Показания приборов, служащих для определения направлений в море, подвержены систематическим и случайным ошибкам. Систематические ошибки приборов направления обычно превышают случайные, и для их компенсации в показания вводят поправки (для компасов ее называют ∆К). В открытом море до сих пор единственным и наиболее точным способом определения ∆К является астрономический. Чтобы определить поправку компаса в море, необходимо получить истинное направление на светило С, т.е. его ИП (рис. 99), и компасное направление на светило, т.е. его КП, тогда величина и знак ∆К определяются по формуле
∆К=ИП—КП |
(195) |
Истинный пеленг светила, равный азимуту его в круговом счете, в море вычисляют по формулам, таблицам, номограммам, приборам или ЭВМ. Азимут является функцией трех аргументов, т.е.
А=А1(φ, δ, t)=A2(φ, δ, h)=А3(φ, h, t=А4(h, δ, t)=А5(φ, q, t) |
(196) |
В зависимости от возможности получения аргументов принимается та или иная из этих зависимостей. В настоящее время применяют три первые зависимости, по которым названы и сами методы определения поправки компаса: метод моментов, метод высот и метод высот и моментов. Формулы для вычисления А в этих методах получаются из параллактического zPNC (см.
рис. 99) по общим формулам сферической тригонометрии.
284
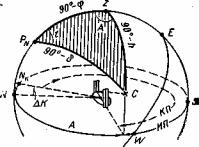
Рис. 99
Метод моментов. Если при пеленговании светила замечен момент по
хронометру и сняты с карты φс и λс, то zPNC решается с полученными φс, δ, t
по формуле котангенсов (см. §4), и после упрощений получаем
ctg А=tg δ cosφс cosec tM– sin с ctg tM |
(197) |
По формуле (197) или по составленным применительно к ней таблицам или номограммам вычисляют азимут в полукруговом счете, переводят в круговой счет и принимают за ИП. Метод моментов является наиболее распространенным, так как он универсален – его можно применять в любое время и к любому светилу, кроме того, он практически удобен.
Метод высот. Если при пеленговании светила измерена или заранее вычислена его высота, а также получены φс и δ, то из zPNC по формуле
косинуса стороны РNС можно получить азимут светила: |
|
cos А=sinδ secφс sech – tgφс tgh |
(198) |
Этот метод применяется в частных случаях, когда |
высоту можно |
вычислить заранее, например для видимого восхода (захода) края Солнца или для его истинного восхода.
Метод высот и моментов. Если после наблюдения высот светила взять его пеленг по компасу и заметить Tхр, то одновременно с получением места судна или линии положения можно получить и поправку компаса.
Для вычисления h и A применяется система формул: sin hc=sinφс sin+cos φc cos δ cos tM;
285
sin Ac=sin tM cosδ sec hc |
(199) |
Если ∆K получается после линии положения, то для приведения Aс к моменту наблюдений КП вычисляется ∆Аt, после чего A=Aс+∆Аt.
Этот метод выгодно применять, если высота светила получена предварительно, а азимут вычисляется попутно.
Метод высот и моментов применяется также при определениях ∆K по Полярной звезде, но ее высота не измеряется, а принимается равной φ. Этот же метод, но с другой системой формул, может быть применен при расчете поправки компаса на ЭВМ.
Определение угла визирования. Для приборов, дающих углы относительно направления на определенное светило, т.е. гироазимутов, фотосекстанов или радиосекстанов, определяется угол визирования на ориентир или его приращение. Если направление на светило удерживать автоматически и непрерывно, то направление на какой-либо ориентир, положим на порт прихода, называемое углом визирования В, можно вычислить из системы трех сферических треугольников и применить в качестве направления движения судна.
Особенности определения поправок гирокомпасов. Гирокомпас используется для получения курсов и пеленгов. В первом случае он применяется как курсоуказатель, по показаниям которого судно следует длительное время. В этом случае необходимо знать постоянную поправку ∆ГПП гирокомпаса, дающую среднее из его отклонений – мгновенных поправок ∆ГК',
т.е. |
|
|
|
|
∆ГКП = |
[∆ГК'] |
(200) |
||
N |
|
|||
|
|
|||
где ∆ГК'=ИП–КПСВ– мгновенные поправки за интервал 2,5 ч; N– число поправок (4—10).
Мгновенная поправка – это обычная отдельная поправка, которая определена по трем пеленгам светила. Она применяется для исправления пеленгов около данного момента. Отклонения мгновенной поправки от
286

постоянной обычно не превышают 0,5—1о (после маневров – 2°). Эти отклонения характеризуют точность курсоуказания.
Для поправки магнитного компаса характерно то, что она зависит от курса, поэтому должна определяться именно на данном курсе.
§61. ВЛИЯНИЕ ОШИБОК В φс И λс НА ВЫЧИСЛЯЕМЫЙ АЗИМУТ СВЕТИЛА. НАИВЫГОДНЕЙШИЕ УСЛОВИЯ НАБЛЮДЕНИЙ
В формулы (197) и (199) для вычисления азимута входят координаты места судна φ и λ, которые, как правило, являются счислимыми и лишь изредка обсервованными. Азимут, вычисленный по счислимым координатам, также счислимый; для получения же поправки требуется истинный азимут Аи светила. Принимая Ас за Аи, допускаем ошибку ∆А, зависящую в основном от ошибок ∆φ и ∆λ в счислимых координатах; эта ошибка войдет в поправку компаса.
Ошибку в АС можно рассматривать как приращение азимута от приращений в широте и долготе места и получить ее с помощью ряда
∆A = |
∂A |
∆ϕ + |
∂A |
+.... |
(*) |
|
∂ϕ |
∂λ |
|||||
|
|
|
|
или
∆А= ∆Аφ+∆Аλ
где ∆Аφ и ∆Аλ – приращения A по φ и λ (первые члены ряда).
Определим значения ∆Aφ и ∆Аλ, и условия, при которых этими ошибками можно пренебречь.
Ошибки в А, вызываемые ошибкой в φ. Для определения ∂∂ϕd
продифференцируем формулу (197) для ctgA по A и φ:
− |
∂A |
|
= (−tgδ cosect sinϕ − cosϕcost)∂ϕ |
sin 2 |
|
||
|
ϕ |
||
Произведя упрощения, показанные в §7 (применяя в числителе формулу sin h, а затем – синусов), получим
287

|
∂A |
= sin2 A( |
sinδ1sinϕ |
+ |
cosϕcost |
) = |
sin2 A |
(sinδ sinϕ + cosϕcosδ cost) = |
|
|
∂ϕ |
cosδ sin t |
|
cosδ sin t |
|||||
|
|
|
sin t |
|
|
||||
= sin Asin Asinh = tghsin A |
|
|
|
||||||
|
|
sin t cosδ |
|
|
|
|
|
|
|
Учитывая формулу (*), получим |
|
|
|
||||||
|
|
|
|
|
∆Aφ=tgh sinA ∆φ |
|
(201) |
||
Из формулы (201) видно, что при h=0 или A=0 ошибка ∆Aφ также равна |
|||||||||
нулю. |
|
|
|
|
|
|
|
|
|
Ошибки в A, вызываемые ошибкой в λ. Формула для изменения |
|||||||||
азимута в суточном движении была получена в §11 в виде |
|
||||||||
|
|
∆At=—(sinφ– tgh cosA cosφ)∆tM =–cosq cosδ sec h ∆tM, … |
(**) |
||||||
Ho tM=tГР±λWOst , и так как tГР практически безошибочен, то ∆tM=± λWOst т.е.
ошибка в часовом угле вызывается ошибкой в счислимой долготе, поэтому
формула (**) при ±λOst примет вид |
|
|
W |
|
|
Ost |
Ost |
(202) |
∆At= mcosq cosδ sech ∆λW |
= m(sinφ – cosφ tgh cosA) ∆λW |
|
Принимая в формуле (202) вместо ∆λ ошибку в отшествии ∆w secφ, после |
||
упрощений получим |
|
|
∆AW= m(tg φ– tg h cosA)∆w |
(202') |
|
Из анализа этих формул видно, что ошибка ∆Aλ, также зависит от высоты светила и будет меньше при его малой высоте. Кроме того, ошибка зависит от широты места. При склонении, близком к 90°, как у Полярной звезды, ошибка ∆Aλ равна нулю.
Совместное действие ошибок счислимых координат. Ошибку удобнее анализировать, если выразить∆φ и ∆λ (для определенности примем ∆λOst) через невязку счисления (снос) С и ее направление Асн, т.е. принять
∆φ=С соs Aсн и ∆λOst=cos φ=СsinAСH
тогда
sin A ∆А=∆Аφ+∆Аλ=tgh sin AC cos ACH – (sinφ-cosφ tgh cosA) cosϕCH C
или после преобразований
288