

—секстаны требуют переаттестации через три года и при повреждениях;
—зубчатую рейку секстана следует периодически прочищать щеткой и смазывать маслом; после этого следует прокрутить барабан от 0 до 140°;
—следует избегать ударов по какой-либо части секстана;
—измерение высот и поправки индекса следует заканчивать вращением барабана всегда в сторону увеличивающихся отсчетов — для компенсации мертвого хода.
§47. ПОНЯТИЕ О СЕКСТАНАХ С ИСКУССТВЕННЫМ ГОРИЗОНТОМ
Применение искусственного горизонта в море. В условиях, когда светила видны, а естественный горизонт не виден: ночью, в туман, во льдах — в принципе можно применить искусственный горизонт. При плавании во льдах (с выносом на лед) можно практически применить любой искусственный горизонт (ртутный, масляный, зеркальный) или теодолит. Делались попытки применить и в открытом море приставки к секстану в виде уровня или гироскопа или масло в ведре. Однако одиночное измерение в море дает высоту относительно равнодействующей сил тяготения и качки — «ложной вертикали»
— до 2—3°. Для получения точной вертикали необходимо непрерывное наблюдение с автоматическим осреднением результатов. Такое осреднение выполняется фрикционным полуавтоматом — интегратором, и только с его введением (в 40-х годах) стало возможным применение секстана с искусственным горизонтом. Позже появились гировертикали, стабилизирующие по вертикали автоматические установки, но это уже область астросистем, не применяемых на морском флоте (см. §99).
В настоящее время имеются: интегрирующий морской секстан (ИМС) с пузырьковым уровнем, такой же гироскопический секстан (ГИМС) и панорамные перископические секстаны с гирогоризонтом — в авиации и подводном флоте.
Принципиальная схема секстана на ИМС и ГИМС. В интегрирующих
216
секстанах применена та же отражательная схема, что и в навигационном, но для искусственного горизонта.
Пусть на рис. 77 zO — отвесная линия, даваемая пузырьком R или гироскопом G; CB — направление луча от светила. Угол zEC — зенитное расстояние светила, равное 90°—h, который надо измерить.
Поместим на пути луча СВ плоское стекло В, наполовину прозрачное- (большое зеркало), а на пути луча DO от вертикали — неподвижное зеркало А (пятиугольная призма); угол между их плоскостями — ω. Поворачивая зеркало В, можно совместить лучи от светила и вертикали. Установим соотношение между углами ω и 90° — h.
Из ∆ABE на основании теоремы о внешнем угле (см. §44) получим
(90O–h)+2β=2α
или |
|
|
|
|
|
90°–h=2(α–β) |
(*) |
||||
Аналогично из ∆ABF получим ω+β=α или |
|
||||
|
ω=α–β |
|
|||
Подставляя эту формулу в (*), получим |
|
|
|
|
|
|
900–h=2 ω |
|
|||
или |
|
|
|
|
|
ω = |
900 − h |
= |
z |
|
(148) |
2 |
|
||||
|
2 |
|
|
||
т.е. измеряемый угол между отвесной линией и направлением на светило равен двойному углу между зеркалами при совмещении изображений пузырька уровня и светила в поле зрения трубы.
Полученное соотношение (148) аналогично выведенному для навигационного секстана.
Установим, как расположится зеркало В относительно А при высотах светила h=О и 90°.
217
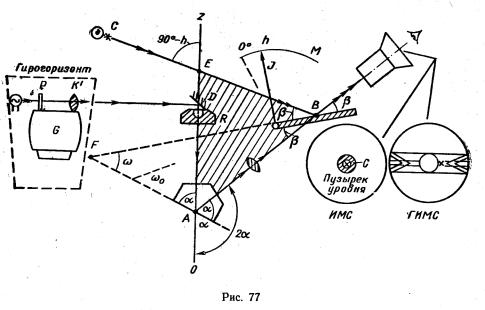
Из выражения (148) при h=0 получаем ω0=45°, а при h=90° ω=0°, т.е. угол между зеркалами меняется от 45 до 0°. Следовательно, если при угле ω0=45° на шкале 0° М поместить ноль (см. рис. 77), а полуградусные деления ее пометить целыми градусами, то угол поворота индекса J, равный углу поворота зеркала В, даст отсчет высоты светила. Поворот зеркала В осуществляется угломерным барабаном.
Особенности устройства секстанов ИМС и ГИМС. Интегрирующие секстаны состоят из следующих основных узлов: оптической системы, искусственного горизонта (уровень, гироскоп), угломерного устройства, осредняющего механизма (интегратора), осветительной системы, корпуса прибора и вспомогательных деталей (рис. 78).
Оптическая система и искусственный горизонт секстанов показаны на принципиальной схеме (см. рис. 77); отдельные детали: фильтры, зрительная труба, уровень показаны на рис. 78 общего вида секстана ИМС (1 — интегратор; 2 а, б — кнопки включения и выключения фиксатора; 3 — серьга подвески; 4 — угломерный барабан; 5 — светофильтры; 6 — зрительная труба; 7 — выключатель освещения; 8 — корпус прибора; 9 — рукоять; 10 — уровень; 11 — регулятор уровня; 12 — пусковой рычаг; 13 — заводная головка; 14 — переключатель интервалов работы интегратора; 15 — часовой механизм интегратора; 16 — объектив для определения iк; 17 — матовое стекло и
218
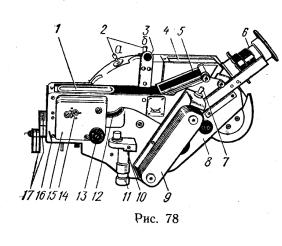
фильтры для определения iк).
Угломерное устройство состоит из угломерного барабана 3 (рис.79), неподвижного индекса i и устройства, осуществляющего поворот большого зеркала. Шкала барабана имеет градусные деления (три раза по 0—9°) с отверстиями в них (см. рис. 79) и пятиминутные; рядом расположена шкала десятков градусов 2.
Интегратор 6 (см. рис. 79) соединяется с барабаном соединительным устройством (фиксатор входит в отверстие в шкале барабана). Интегратор состоит из двигателя — часовой механизм 15 (см. рис. 78) и каретки 5 а,б (см. рис. 79), суммирующей при ее движении все повороты угломерного барабана, совершаемые при наблюдениях. Полный отсчет измеренной высоты получается
как сумма четырех отсчетов: |
|
|
|
|
|
Шкала 2—десятков градусов |
|
|
|
10° |
|
Отсчет фиксатора на угломерном барабане 3 |
6 |
|
|||
Градусная шкала 5 а интегратора 6 |
3 |
|
|||
Минутный барабан 5 б интегратора 6 |
53' |
|
|||
|
|
|
|
ос=19053' |
|
При пуске интегратора (см. рис. 78, рычаг 12) замечают Т П |
середины |
||||
|
|
|
|
ХР |
|
наблюдений получают по формуле |
|
|
|
|
|
ТХР |
=ТХРП + |
∆Т |
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
где ∆T — период работы |
интегратора |
(40, 120, 200c); период |
|||
219
устанавливается переключателем 14 (см. рис. 78) в зависимости от условий: чем хуже условия, тем больше период осреднения.
Освещение уровня и шкал подается от трансформатора (2,5 В); в секстане ГИМС питание гироскопа (36 В, 400 Гц) осуществляется от умформера.
Рис. 79 Рис. 80
Понятие о перископическом панорамном секстане. Для дистанционного измерения высот светил из самолета или подводной лодки применяются перископические интегрирующие секстаны. В них луч света от светила через поворотную куб-призму 1 (рис. 80), играющую роль большого зеркала секстана ИМС, проходит через оптическую систему 2 перископа и в поле зрения трубы 6 совмещается с изображением вертикали, указываемой гироскопом 4.
Поворот куб-призмы 1 и отсчет угла осуществляются угломерным барабаном 3 с помощью интегратора 5. Как видим, в схему перископического секстана вошли элементы секстана ИМС или ГИМС, но в стационарной установке.
Наблюдения с секстанами ИМС и ГИМС. Определение поправки индекса iK. Определяют iК совмещением прямовидимого изображения Солнца через объектив 16 (см. рис. 78) с дважды отраженным при установке барабана на отсчет — 3°. При совмещении изображений отсчет oiK выполняют по верниеру 4 (см. рис. 79), после чего
220
iK=10°—(oiK+3°) |
(149) |
Эта поправка суммируется с поправкой |
s из паспорта прибора. К |
сожалению, поправки s даны только для угломерного барабана и не дают общей поправки относительно вертикали.
Измерение высот светил. Приготовление секстана ИМС заключается в установке трубы и регулировке пузырька уровня (головкой 11, см. рис. 78), секстана ГИМС — в пуске умформера, подвеске секстана, запуске и разгоне гироскопа. Для наблюдений секстан берут в обе руки, поворачивают в вертикал светила, угломерным барабаном устанавливают высоту светила, вводят фиксатор и заводят часовой механизм.
Для измерения высоты секстаном ИМС изображение пузырька уровня в поле зрения трубы (см. рис. 77) должно быть приведено путем наклона прибора в центр квадрата сетки и совмещено вращением угломерного барабана с изображением светила, после чего пускают интегратор и секундомер. При измерениях пузырек должен оставаться в пределах квадрата сетки, а изображение светила должно находиться во время наблюдений в центре пузырька — это называется длительным совмещением. Это достаточно трудно, и для получения надежных результатов требуется твердое усвоение приемов работы (по инструкции) и тренировка.
В поле зрения секстана ГИМС (см. рис. 77) горизонтальные полосы (биссекторы) указывают положение гирогоризонта: внешние полосы предназначены для вмещения изображения Солнца, внутренние — звезды.
Полосы нанесены на пластинке р наверху гироскопа G и удаляются в бесконечность коллиматорной линзой К'; эта система вращается вместе с ротором (см. рис. 77).
Правильное положение секстана ГИМС относительно гирогоризонта устанавливается по уголкам, нанесенным на неподвижной линзе. На рис. 77 показано правильное положение уголков и Солнца, которое должно выдерживаться все время наблюдений.
Снятие полученного ос и Тхр показано выше. Точность измерения высоты
221
секстанами ИМС и ГИМС колеблется в пределах ±1,5—5' (в среднем 2,5'). Исследование этих приборов в последние годы показало, что в принципе они могут дать точность в месте 2—3' и служить вспомогательным прибором. Однако из-за низкого качества часто данный прибор обладает неизвестной поправкой в 2—3° (ее можно определить на берегу).
Понятие об измерении высоты в масляный (ртутный) искусственный горизонт. Этот, некогда распространенный, прием теперь может встретиться только в аварийных случаях. В качестве горизонта можно использовать сосуд с вязкой жидкостью, например маслом. На секстане ставится двойная высота Солнца (или другого светила). Труба направляется в горизонт с близкого расстояния. Измерение производят касанием краев Солнца (совмещением звезд); если прямовидимое изображение Солнца расположено сверху, то измеряют высоту нижнего края Солнца. Прямовидимое изображение можно обнаружить, прикрывая большое зеркало рукой. При исправлении высоты Солнца (см. §56) применяют формулу
h = 12 (ос + i + s) + (−∆hp + p) + R + ∆ht;B
222