

2.5.3. Оптимальный весовой вектор
Сигнал ошибки запишем как:
![]()
или
![]()
Здесь для удобства
записи опущен индекс kвектораWk.
Найдем![]() :
:
![]() .
.
Будем считать, что
![]() ,dk, иXk–
стационарны в статическом смысле и
найдем средне-квадратическую ошибку:
,dk, иXk–
стационарны в статическом смысле и
найдем средне-квадратическую ошибку:
![]() .
.
Введем обозначения:
![]() - корреляционная
матрица входного сигнала. Элементы по
диагонали равны средне-квадратичным
значениям входных компонентов вектора
Xk.
- корреляционная
матрица входного сигнала. Элементы по
диагонали равны средне-квадратичным
значениям входных компонентов вектора
Xk.
![]() - взаимокорреляционная
функция отсчетов полезного отклика и
отсчетов входного сигнала.
- взаимокорреляционная
функция отсчетов полезного отклика и
отсчетов входного сигнала.
Тогда:
|
|
(2.150) |
Чтобы найти весовой вектор W, при котором средне-квадратичное отклонение имеет минимум, нужно взять производную выражения (2.150) поW, приравнять к нулю и решить уравнение относительноW.
![]() .
.
Откуда находим:
|
|
(2.151) |
При этом
|
|
(2.152) |
Из выражения (2.150) видно, что если отсчеты входного сигнала и полезного отклика – стационарные случайные процессы, то средне-квадратичное отклонение является квадратичной функцией вектора W.
2.5.3.1 Метод градиентного поиска оптимального вектора w
В практических системах поиск Wопт производится не по выражению (2.151), т.к это технически не целесообразно.
Наибольшее применение нашли методы нахождения Wопт, основанные на градиентных методах для определения направления перестройки весовых коэффициентов для достиженияminСКО. Наиболее известны – это метод Ньютона и наискорейшего спуска.
Рассмотрим принцип градиентного поиска для случая системы с одним весовым коэффициентом.
Итеративный процесс градиентного поиска можно представить в виде:
|
|
(2.153) |
где k– номер шага,k– градиент при![]()
Таким образом
![]() - текущее значение,
- текущее значение,![]() - новое значение, µ - константа, определяющая
устойчивость устройства и скорость
сходимости.
- новое значение, µ - константа, определяющая
устойчивость устройства и скорость
сходимости.
При минимальном значении СКО градиент = 0.
Сходимость метода Ньютона зависит от выбора начального значения w0). Для широкого класса функции он обладает быстрой сходимостью.
Зависимость СКО
![]() от озменений весового вектора называется
от озменений весового вектора называется
о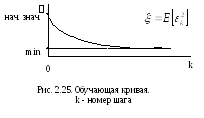 бучающей
кривой. Общий вид ее показан на рис.
2.25.
бучающей
кривой. Общий вид ее показан на рис.
2.25.
Выражение для
![]() можно записать в виде
можно записать в виде![]() ,
,
где - собственное значениеr00матрицыR.
Тогда
![]() .
.
Для случая с одним весовым коэффициентом получаем:
![]() .
.
Тогда подставляя в (7) получаем
![]()
или
![]() ,
,
где w0– начальное приближение,![]() - называется знаменателем прогрессии.
- называется знаменателем прогрессии.
Алгоритм сходится,
если
![]() <1,
<1,![]() .
.
2.5.3.2 Метод Ньютона для многомерного пространства
Оптимальный вектор весовых коэффициентов вектор градиента определяются соотношениями
|
|
(2.154) |
|
|
(2.155) |
Умножим обе части
второго равенства слева и справа на
![]() и тогда с учетом первого равенства
получим
и тогда с учетом первого равенства
получим
![]() ,
,
или в виде адаптивного алгоритма
|
|
(2.156) |
Равенство (2.156)
описывает метод Ньютона для многих
переменных. Этот алгоритм приводит к
оптимальному решению за один шаг
![]() .
.
Этот метод Ньютона можно обобщить, если ввести константу , определяющую скорость сходимости
|
|
(2.157) |
при
![]() получаем решение за один шаг.
получаем решение за один шаг.
Можно выбрать в пределах области устойчивости![]() .
.
Однако, желательно,
чтобы система имела меньший размер шага
![]() .
.
Вопросы для самопроверки
Классификация адаптивных фильтров.
Нарисуйте схему адаптивной системы и объясните принцип ее работы.
Какие две физические интерпретации существуют относительно входного вектора сигнала.
Что такое векторное представление сигнала.
Что называют обучающей кривой.
Чему равен оптимальный весовой вектор.
Устройства модуляции и демодуляции измерительных
сигналов