

Питання для самоконтрою
1. Що може бути об’єктами автоматизації у сільському господарстві?
2. Що дозволяють визначити властивості об’єкта управління?
3. Як записується закони збереження для теплових об’єктів, для об’єктів, що здійснюють круговий та лінійний рух при аналітичному методі дослідження об’єктів?
4. Які переваги аналітичного методу дослідження об’єктів автоматизації?
5. В чому полягає графічна апроксимація?
6. Які переваги методу інтегральних площин?
7. Як визначається передаточна функція об’єкта управління за умов пасивного експерименту?
ТЕСТИ
1. Що називається об’єктом автоматизації під час розробки систем автоматизації?
Будь-який технологічний процес, машина, устаткування, апарат, що підлягає автоматизації.
Будь-який технологічний процес, що підлягає автоматизації.
Будь-яка машина, устаткування, апарат, що підлягає автоматизації.
2. Де забезпечуються найбільш сприятливі умови для автоматизації?
Для переробки та зберігання сільськогосподарської продукції.
Для стаціонарних процесів у тваринництві, закритому ґрунті, переробці та зберіганні сільськогосподарської продукції.
Для стаціонарних процесів у тваринництві, мобільної техніки.
3. Як класифікуються об’єкти автоматизації?
Прості та складні.
Прості та складні; із зосередженими та розподіленими параметрами.
Із зосередженими та розподіленими параметрами.
4. Скількома координатами описуються динамічні властивості простого об’єкта автоматизації?
За допомогою двох узагальнених (входу та виходу) координат.
Потребує не менше трьох координат.
За допомогою чотирьох узагальнених (входу та виходу) координат.
5. Скількома координатами описуються динамічні властивості складного об’єкта автоматизації?
За допомогою двох узагальнених (входу та виходу) координат.
Потребує не менше двох координат.
Потребує не менше трьох координат.
6. Вкажіть рівняння А. Стодоли, яке використовується для визначення передаточних функцій об’єктів.
А.
![]()
де S – площа основи резервуарів;
h – рівень рідини;
Q – потоки рідин.
В.
![]()
де Та – час розгону об’єкта;
δ – коефіцієнт самовирівнювання;
Δх, Δу – відхилення змінних на вході та виході об’єкта.
С.
![]()
де х, у – вхід та вихід об’єкта;
L – незмінні його властивості.
7. Як поділяються залежно від знаку коефіцієнта самовирівнювання об’єкти автоматизації?
А. δ >0 – статичні стійкі; δ = 0 – астатичні; δ <0 – статичні нестійкі.
В. δ >0 – статичні стійкі; δ <0 – статичні нестійкі.
С. δ >0 – статичні стійкі; δ = 0 – астатичні.
8. Який вигляд має передаточна функція для астатичного об’єкту?
А.
![]()
В.
![]()
С.
![]() де ε – швидкість розгону об’єкту
де ε – швидкість розгону об’єкту
9. Який вигляд має передаточна функція для статичного об’єкту?
А.
![]()
В.
![]()
С.
![]()
10. Як розраховується швидкість розгону об’єкта?
А.
![]()
В.
![]()
С.
![]()
1.6. ВИБІР АЛГОРИТМУ УПРАВЛІННЯ ОБ’ЄКТОМ
Динамічні властивості об’єктів управління дають змогу розробникам систем автоматики на стадії проектування визначити алгоритм управління. Для цього слід проаналізувати співвідношення між постійною часу та часом запізнювання. Відомо, що
![]() –безперервний
(лінійний),
–безперервний
(лінійний),
![]() –позиційний,
–позиційний,
![]() –рекомендують
імпульсний алгоритм управління.
–рекомендують
імпульсний алгоритм управління.
При визначенні алгоритму управління необхідно пам’ятати, що структура передаточної функції повинна відповідати виразам для статичного і астатичного об’єкта. Метод інтегральних площин дає більш складну структуру. У цьому випадку:
за передаточною функцією знаходять оригінал, за яким будують криву розгону;
крива розгону (побудована) апроксимується графічним способом, яких би динамічних властивостей не мали зазначені об’єкти;
розраховані параметри передаточної функції використовуються для визначення алгоритму управління.
Лінійний алгоритм управління – один із найпоширеніших у сільськогосподарському виробництві. Він поєднує пропорційний, інтегральний, пропорційно-інтегральний, пропорційно-диференційований, пропорційно-інтегрально-диференційований. Кожний з них має свої недоліки і а переваги.
У практиці проектування для конкретного об’єкта вибирають такий алгоритм, який би забезпечив один із трьох типових перехідних процесів: аперіодичний, з 20 %-им перерегулюванням та з мінімальним інтегральним показником якості (рис. 1.23). Аперіодичний характеризується максимальним динамічним відхиленням, мінімальним часом регулювання та відсутністю перерегулювання. Перехідний процес з 20 %-м перегулюванням середній за якістю. Перехідний процес з мінімальним інтегральним показником якості (площа між кривою перехідного процесу та віссю часу мінімальна) характеризується значним перерегулюванням, найбільшим часом регулювання та мінімальним динамічним відхиленням. Конкретний типовий перехідний процес може бути визначений з урахуванням вимог технологів до відповідного об’єкта управління.
Методика вибору найкращого алгоритму управління полягає у визначенні динамічного коефіцієнта регулювання. Для статичних об’єктів:
![]()
де у1 – максимальне динамічне відхилення; kо – коефіцієнт передачі об’єкта управління; ум – максимально можливе збурення по навантаженню (у відсотках переміщення регулюючого органу).
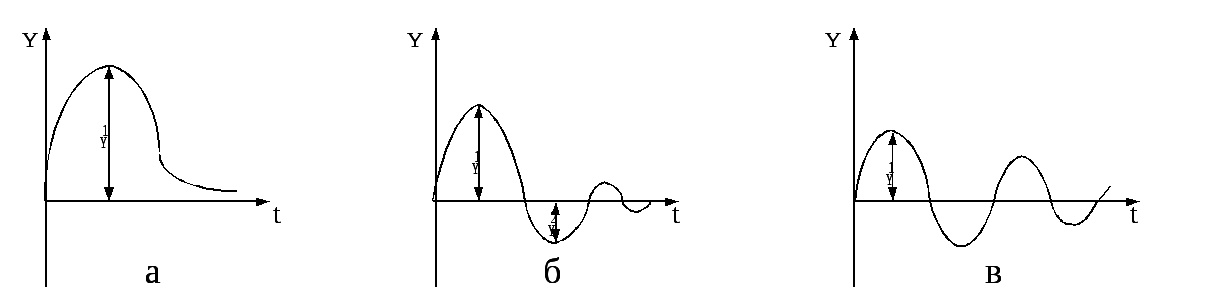
Рис. 1.23. Типові перехідні процеси:
а – аперіодичний; б – із 20 %-им перерегулюванням;
в – із мінімальним інтегральним показником якості
Після цього за графічними залежностями визначають алгоритм управління.
Для астатичних об’єктів:
![]()
де εо – швидкість розгону об’єкта;
τ – час запізнювання.
Для астатичного об’єкта алгоритм управління знаходять за табл. 1.18.
Таблиця 1.18