

8. До чого зводиться спектрофотометричний метод діагностики?
До реєстрування амплітуди і характеру акустичних сигналів (шумів і вібрацій), які змінюються в міру зносу деталей і збільшення зазорів сполучених вузлів.
До визначення змісту продуктів зносу в пробі масла, шляхом виміру спектрів випромінювання при спалюванні проби масла в електричній дузі.
До визначення стану деталей по ступені зносу їхніх геометричних розмірів, зазору сполучених деталей, ходу важелів, а також при зміні герметичності робочих обсягів.
8.1.2. Автоматизація технологічних процесів миття, розбирання і збирання агрегатів
Сільськогосподарську техніку експлуатують в різних кліматичних умовах. Поверхні тракторів, автомобілів і сільськогосподарських машин в результаті контакту з грунтом, рослинами, паливно-змащувальними матеріалами, добривами.
Забруднення різних видів зустрічаються в найрізноманітніших поєднаннях. Застосовують за призначенням різні ефективні миючі засоби. Так, по хімічному складу розрізняють синтетичні і кислі миючі засоби, органічні розчинники, розчиняючо-емульгуючі засоби.
За фізико-хімічними основами миючого засобу всі способи очищення і реалізовуючі їх мийні машини ділять на струменеві, заглибні і комбіновані.
Найбільш поширений струменевий спосіб, при якому подача розчину доповнюється механічною дією струменя на забруднення. Цей спосіб реалізований в моніторних і струменевих мийних установках.
Зовнішні частини машини і зняті агрегати миють холодною або гарячою водою. Первинну мийку сільськогосподарських машин проводять на відкритих площадках з використанням звичайних шлангів і відцентрових насосів.
Розібрані деталі і вузли на ремонтних підприємствах миють у спеціальних камерах водяними розчинами, попередньо підігрітими до температури 60...80 °С.
Система автоматичного регулювання температури миючих розчинів. У сільськогосподарському ремонтному виробництві застосовують різні способи нагріву миючого розчину: за рахунок спалювання рідкого палива в спеціальних камерах згорання; пропусканням пари (газу) по змійовику, поміщеному у ванну з миючим розчином; електричний. Останній спосіб як найекономічніший, надійніший і простіший широко застосовують в автоматичних системах регулювання температури рідин, газів. У системах, що реалізовують електричний спосіб нагріву, як регулюючі елементи звичайно використовують ТЕНи заглибного типу в поєднанні з двопозиційними регуляторами і датчиками, виконаними на базі манометричних термометрів електроконтактних.
Принципова схема системи регулювання температури миючого розчину наведена на рисунку 8.1. Всі ТЕНи розділено на дві групи:
перша – ТЕНи, що включаються контактором КМЗ і працюючі тільки в період виводу температури миючого розчину до заданого значення (надалі на всьому протязі роботи ці ТЕНи відключено);
друга – ТЕНи, що включаються контактором КМ2 і працюють на першій стадії сумісно з ТЕНами першої групи, а після виводу температури миючого розчину в бажану область температури, що включаються періодично для підтримки, в необхідному діапазоні.
Потужність ТЕНів першої групи в основному визначається часом виводу температури миючого розчину в бажану область і кількістю розчину, а другої групи – втратами теплоти в процесі миття. Як датчик температури миючого розчину використовують манометричний термометр електроконтактний. У разі виникнення будь-яких несправностей, збоїв, які можуть викликати перевищення температури миючого розчину щодо верхньої межі зони регулювання, в схемі передбачене використовування термодатчика SK3, реагуючого на перевищення. При цьому розмикаючий контакт SK3 знеструмлює обмотку реле KV5, яке відключає нагрів і включає світлову сигналізацію “Аварія”. Включення контактора КМ1 відбувається після усунення несправності в схемі і подальшого натиснення кнопки SB2.

Рис. 8.1. Принципова схема САК температури миючого розчину
Деякі мийні розчини містять шкідливі для здоров’я компоненти. У МІІСПе розроблені нетоксичні миючі засоби: МС-6 – для зовнішнього очищення тракторів, автомобілів, комбайнів від маслянисто-грязьових відкладень; МС-15 – для очищення трансмісій і двигунів від мастил і грязі, що загустіла; MС-8 – для очищення сильно забруднених деталей.
Без автоматизації неможливо одержати високу якість мийно-очисних робіт з одночасним зниженням їхньої трудомісткості. Ремонтні підприємства обладнаються мийними конвеєрами з щітковими установками для обмивання й очищення машини й установками обдуву вимитих машин. Мийка й обдувка здійснюються в такий спосіб. Машина під’їжджає до конвеєра і направляється на нього по сигналі світлофора, що дозволяє витримувати мінімальну дистанцію між машинами. Переміщаючи по конвеєрі, машина своїм корпусом перетинає промінь світла, що викликає включення фотореле системи автоматизації. Фотореле включає подачу теплової води й установку щіткової мийки, і починається мийка машини, що рухається. Наближаючись до установки обдуву, машина перетинає другий промінь світла, і при цьому відбувається вмикання другого фотореле, відключення установки щіткової мийки, припинення подачі води і включення електровентиляторів обдуву. Як тільки машина вийде з зони обдуву, від променя світла спрацьовує трете фотореле і відключає електровентилятори обдуву.
Спеціальні мийні камери мають часткову автоматизацію технологічних процесів: керування температурою і рівнем мийних розчинів, періодичне їхнє очищення від забруднень, створення хитних або обертових рухів камер мийки за заданою програмою.
Система автоматичного управління ТП миття складальних одиниць і деталей полягає в подачі в камеру миття, опусканні шторки, що закриває прохід для виключення розбризкування миючого розчину, включенні насоса подачі розчину в сопла, забезпеченні відносного переміщення деталей і струменів рідини. Після закінчення часу миття двигун насоса відключається, шторка, що закриває вхідний отвір, підіймається, і корзина з деталями повертається в початкове положення. Для видалення пари миючої рідини на всьому протязі миття працює витяжна вентиляція.
Схема автоматизації ТП миття показана на рисунку 8.2. Для управління виконавчими механізмами встановлені безконтактні кінцеві вимикачі SQ1...SQ5 у комплекті з проміжними реле KV1...KV5 (рис. 8.3). У початковому стані візок знаходиться в крайньому лівому положенні (включене реле KV1), шторка – в крайньому верхньому (включене реле KV2). При дотриманні цих умов і натисненні кнопки SB2 включається контактор КМ1 і своїм замикаючим контактом самоблокуєтся.
При натисненні кнопки SB3 на обмотку пускача приводу каретки “Вперед” КМ2 подається напруга. При підході каретки до шляхового вимикача SQ4 останній включає реле KV4, розмикаючий контакт якого знеструмлює котушку пускача КМ2, а замикаючий – готує ланцюг живлення котушки пускача КМ2 по ланцюгу KV3–KV4 – KV5–КМЗ і подає живлення на котушку пускача приводу шторки КМ5.
За допомогою пускача КМ5 подається напруга на обмотку іншого пускача-вмикача вентилятора КМ7. Шторка, яка опустилася в крайнє нижнє положення, за допомогою вимикача SQ3 включає реле KV3, яке в свою чергу включає пускач насоса КМ4, реле часу КТ1 миття і пускач приводу каретки “Вперед”. Каретка, продовжуючи рух вперед, впливає на вимикач SQ4. Рух каретки триває до спрацьовування SQ5. Реле відключає живлення з обмотки реле “Вперед” і подає його на обмотку реле “Назад”. Рух каретки продовжується до тих пір, поки не спрацюють контакти реле часу (миття), які забезпечать включення пускача приводу шторки “Вгору”. Вона впливає на SQ3. При цьому реле відключається, живлення з пускача приводу насоса припиняється, а ланцюг живлення пускача приводу каретки “Вперед” розривається. Другий замикаючий контакт КТ1 готує ланцюг живлення котушки.

Рис. 8.2. Схема автоматизації миючої машини
Автоматизація розбірних і складальних процесів сполучена з великими труднощами, що виходять зі специфіки виконання робіт. Тому розбірні і складальні операції виконують у майстернях вручну. Однак на потокових лініях широко застосовують механізовані пристосування: гайковерти, шуруповерти, гідравлічні і пневматичні молоти, преси, дрилі тощо.
Під час зборки агрегатів використовують автоматичні лінії подачі деталей до місця зборки, транспортування агрегату, що збирається, на наступне робоче місце.
Найбільш складні процеси автоматичної зборки – орієнтація деталей відносно один одного і сполучення їх. Звичайно деякі складальні операції, легко виконувані вручну, важко піддаються автоматизації, і навпаки, важко виконувані вручну операції легко можуть бути автоматизовані.

Рис. 8.3. Принципова схема пристрою керування мийкою
Автоматизація зборки вимагає в ряді випадків зміни конструкції складальних пристосувань і самих деталей. Технологічний процес зборки повинний виконуватися з найменшим числом змін положення деталей.
На ремонтних заводах і в майстернях для підйому, опускання і переміщення агрегатів, машин і устаткування, які ремонтуються використовують електрокари, тельфери і мостові крани. Найбільше поширення одержали тельфери – підвісні візки.
Вантажопідйомність тельферів – від 0,2 до 5 т. Тельфери малої вантажопідйомності мають один електродвигун для підйому деталей, а їхній візок вручну переміщають уздовж балки.
Тельфери великої продуктивності мають два електродвигуни для підйому M1 і переміщення М2 (рис. 8.4). Керує тельфером персонал майстерні за допомогою кнопкової станції 1. Піднімальний барабан 3 приводиться в обертання двигуном 2 (M1). Переміщається тельфер і закріплений на гаку 4 вантаж по двотавровій балці 8 на ходових колесах 9, що приводяться в обертання електродвигуном 10 (М2) через редуктор. Електрична енергія до двигунів підводиться по гнучкому кабелі.
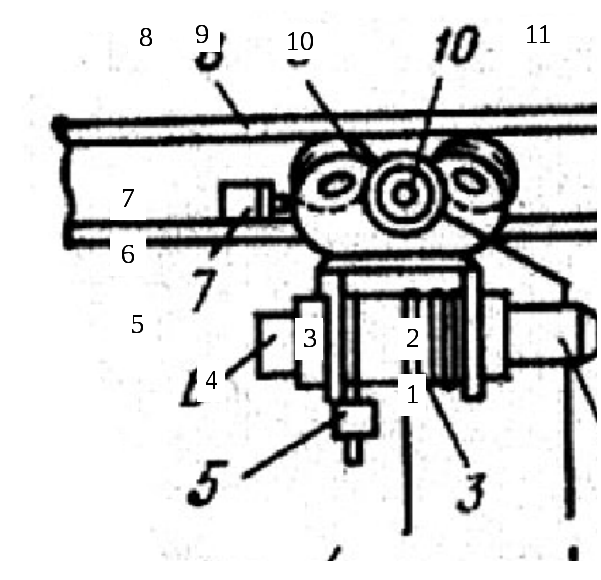
Рис. 8.4. Загальний вид тельфера
Кожен електродвигун працює (рис. 8.5), поки натиснуті пускові кнопки підйому вантажу SB1, спуску SB2, переміщення вперед SB3 і назад SB4. При відпусканні кнопки розриваються відповідні ланцюги магнітних пускачів КМП...КМН, і електродвигуни відключаються від мережі. Такий метод керування – поштовховий.
Кінцеві вимикачі 5, 7 і 11 обмежують переміщення вантажу при його підйомі SQ1 і горизонтальному пересуванні SQ2 і SQ3. При їхньому розмиканні двигуни зупиняються.
Електродвигун підйому вантажу має електромагнітне гальмо (ЕТ), що при включеному двигуні звільняє барабан 3, а у відключеному положенні стопорить його, крім мимовільного опускання вантажу.

Рис. 8.5. Принципова електрична схема керування тельфера