

Тема 3.2 Построение моделей по результатам активных экспериментов
§ 3.2.1. Методика построения статических экспериментальных моделей
Экспериментальные модели можно использовать для оценки статических характеристик технологического объекта управления. Рассмотрим методику на конкретном примере.
По результатам проведения эксперимента получена табличная функцияy=f(xi):
x 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42
y 11 10 8 8.3 6 6.2 5.3 4.1 4.5 3.5 4. 3 3.0 3.1 2 2.9 2.4 1.9
Анализ экспериментальных данных сводится к нанесению данных на график и оценке тенденции изменения y=f(xi) – рис. 3.4
 Рис. 3.4. График
экспериментальных данных
Рис. 3.4. График
экспериментальных данных
Видно, что выходная величина подвержена помехам. Применим сглаживание скользящим средним.
xс 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42
yс – 9.67 8.77 7.43 6.83 5.83 5.2 4.63 4.03 4.0 3. 5 3.37 2.7 2.67 2.43 2.4 -
Данные после обработки представлены на рисунке 3.5. Характер изменения выходной переменной нелинейный. Как видно из графического представления экспериментальных данных, нужно использовать нелинейное уравнение регрессии.
 Рис.
3.5 Данные после обработки
Рис.
3.5 Данные после обработки
Выберем полиномиальную функцию вида:

Обработку проведем в программном пакете MatLab 5.* по команде p2=polyfit(xc,yc,2) или в пакете MatLab 6.*.
Получим полином p2= 17.0613 -0.7383a + 0.0094a2 , таким образом, статическая экспериментальная модель будет описываться следующим уравнением: Y= 17.0613 - 0.7383x + 0.0094x2.
Рис. 3.6 Сравнение модели с экспериментом
На рисунке: ряд 2 – данные эксперимента, а ряд 1 – данные, вычисленные с помощью модели. Визуально по качественной оценке совпадение хорошее.. Как проверить адекватность модели количественно будет показано ниже.
§ 3.2.2. Методика построения динамических экспериментальных моделей
Методика построения
динамических моделей отличается тем,
что используются другие формы
математического описания. Объекты
моделирования в динамике могут быть
описаны во временной области
дифференциальными уравнениями (3.1) или

(3.1)
передаточными функциями (3.2). В частотной области комплексной частотной характеристикой (3.3).
(3.2.)

(3.3)


Любую форму математического описания экспериментальной динамической модели можно преобразовать из одной в другую.
При активном эксперименте для построения динамической модели объекта на вход объекта подается входное воздействие (сигнал) и регистрируется реакция объекта на выходе объекта. Активное воздействие может быть апериодическим (рис.3.6) и периодическим (рис.3.7). Т.о. после проведения эксперимента с помощью входных воздействий получают табличную функцию. Кривая может быть зашумлена, тогда нужно провести операцию сглаживания, после чего выбрать метод обработки функции.
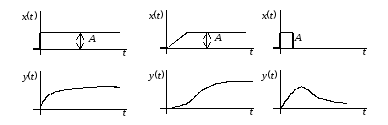
Рис. 3.6. Апериодические воздействия и реакция объекта на них
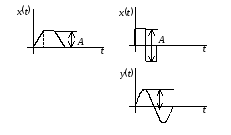
Рис. 3.7. Периодические воздействия на объект
Переходная функция (3.4) - это решение дифференциального уравнения (3.1). Известно, что решение линейного дифференциального уравнения с постоянными коэффициентами и нулевыми начальными условиями существует и единственно. После эксперимента известна табличная функция, которой может соответствовать множество решений (аппроксимирующих функций). Методы аппроксимации переходной функции решением линейного дифференциального уравнения зависят о допущениях при выборе его структуры и используют различные алгоритмы. Это объясняет наличие многих способов оценки коэффициентов аппроксимирующей функции. Большинство из них описано в литературе. [См. Балакирев В.С. и др. Экспериментальное определение динамических характеристик промышленных объектов управления. М.: «Энергия», 1967]. Для аппроксимации гладких не колебательных переходных функции используют решение дифференциального уравнения с простыми вещественными корнями – αi (3.4), при условии, что αi/ αi+1< 0.5 – 0.7.
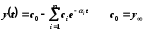
(3.4)
Если переходная функция имеет колебательный характер (решение имеет комплексные корни p=α +βi), то используют выражение (3.5).

(3.5)
Коэффициенты функций
(3.4,3.5) оценивают методом последовательного
логарифмирования или путем решения
задачи оптимизации. Формируется целевая
функция:
В этом выражении: табличные значения xj и yj j=1,2,...N переходной функции; φ(xj, θi) – аппроксимирующая функция; θi – коэффициенты переходной функции, подлежащие оценке.
В указанной литературе описаны и другие методы аппроксимации:
- метод площадей (Симою);
- кратных корней;
- метод Ольденбурга и Сарториуса;
- интерполяция по двум точкам (метод Орманна);
- интерполяция по пяти точкам;
- метод Цирлина.
При колебательном характере переходной функции применяют методы: преобразование Фурье, дискретные преобразования Лапласа, аппроксимация трапециями, суммой парабол.
При использовании
периодического воздействия в виде
синусоиды x(t)=Xвх
SIN(ωt)
регистрирую колебания разной частоты
выходной переменной, а обработка ведется
в частотной области путем оценки A(ω),
φ(ω), где T
- сдвиг периода колебаний на выходе по
отношению ко входу. Затем аппроксимация
КЧХ осуществляется численными методами
с помощью МatLab.
В инженерной практике используется наиболее простой метод. Принимается гипотеза, что объект представляет собой последовательное соединение инерционного звена первого порядка и звена запаздывания с передаточной функцией.
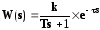
 (3.6)
(3.6)
Строится график переходной функции. В точке перегиба проводится касательная, которая на оси ординат отсекает величину τ, а на уровне установившегося значения y∞ постоянную времени T. К= ∆x/∆y.