

17.4. Устройство электромеханического телеграфного аппарата ста-м67
Стартстопный ленточный буквопечатающий аппарат СТА-М67 имеет следующую техническую характеристику:
Рабочий ток в обмотках электромагнита /р, мА 45—50
Дальность непосредственного телеграфирования L, км:
по воздушной линии . . . 200—250 » кабельной » . . . . до 50
Скорость дискретной модуляции,В, Б(д 50
Информационная скорость передачи сообщений R, знаков/мин 400
Теоретическая производительность
QT, слов/ч 2823
Эффективная исправляющая спо-
соС'Ноеть Цэ, % 30
Искажеьия, вносимые передатчиком 8тр, % 5—6
Любой телеграфный аппарат состоит из трех оснсвных частей: передатчика, движущего механизма и приемника. Структурная схема стартстопного телеграфного аппарата приведена на рис. 17.9.
Передатчик состоит из следующих функционально законченных узлов: клавиатуры КЛВ, шифратора Ш, распределителя передачи РПеР, накопителя передачи #ПеР, старт-стопного устройства СТУ и выходного устройства Вых У. Кроме того, в состав передатчика входят автоответчик АО и автоматический передатчик — трансмиттер TFM.
Клавиатура и шифратор служат для набора механических комбинаций, соответствующих передаваемому знаку, при работе оператора вручную. По расположению клавиш (46 знаковых, расположенных в че-
TKinp паля и ппня уллинрнняя
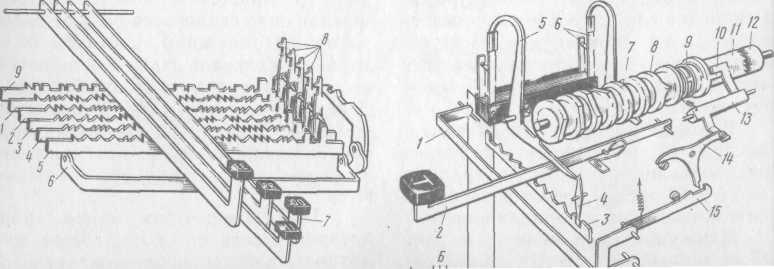
KJitFHiL'a пробела) и знаков на них клавиатура телеграфного аппарата напоминает клавиатуру пишущей мгшинки. Взаимодействие клавиатуры с шифратором пояснено рис. 17.10. Под клавишными рычагами 7 находятся семь линеек: пять комбинаторных /—5, запорная 9 и спусковая 6. Комбинаторные линейки могут свободно перемещаться влево или вправо. На верхней их кромке имеются зубцы, скосы которых выполнены в соответствии с кодовой таблицей МТК.-2. При нажатии на клавишу ее рычаг давит на скосы линеек. В результате каждая линейка занимает либо правое, либо левое положение. Образуется пространственная комбинация, соответствующая передаваемому знаку. Перемещения комбинаторных линеек фиксируются связанными с ними захватывающими рычагами 8, являющимися накопителем передачи.
Спусковая линейка 6, поворачиваясь на двух осях, запускает распределитель передачи. Запорная линейка 9 служит для предотвращения неправильных переходов с передачи букв на передачу цифр и наоборот. Это достигается установкой под клавишные рычаги 7 прямоугольных выступов линейки, которая устанавливается в нужное положение при нажатии клавиш РУС, ЛАТ или ЦИФ.
Взаимодействие основных узлов передающей части пояснено на рис. 17.11.
Преобразовг кие параллельной работы в последовательную осуществляется с помощью распределителя передачи. В аппарате СТА-М67 применен кулачковый шестиконтактный распределитель. Он представляет собой муфту, на внешней поверхности которой имеется семь кулачков. Шесть кулачков 7 (пять кодовых и один стоповый) называются распределительными и имеют срезы, которые расположены по спирали. Подъемный кулачок 8 имеет прилив. При передаче любой комбинации распределительная муфта совершает полный обопот и останавливается.

Стоповый кулачок участвует в формировании стартового и стопового импульсов, а кодовые формфуют информационные элементы комби «-ции.
Управление работой распределителя осуществляется старгстопным устройством. Пу:к распределителя производится в момент ввода очередного символа от вводного устройства, например клавиатуры. Возвращение в исходное положение и остановка распределителя переда т не
зазисят от внешних сигналов и определяются временем рабочего цикла.
При нажатии на любую клавишу клавиш чый рычаг 2 взаимодействует со спусковой линейкой / и поворачивает ее на осевых винтах на некоторый угол. Лин ейка перемещает пусковой рычаг 15 влево, а последний своим зубом захватывает нижнее плечо промежуточного рычага 14 и поворачивает его на некоторый угол. Промежуточный рычаг действует на расцепляющий рычаг 13, который

отходит от расцепляющего выступа 10 ведомого храповика И. Под действием пружины 9 ведомый храповик // сцепляется с ведущим 12 и распределительная муфта начинает вращаться.
Для взаимодействия кулачков с контактными пружинами 6 служат шесть контактных рычагов 5, свободно насаженных на одну ось. Поворот рычага и замыкание контактов возможны только тогда, когда выемка кулачка проходит свое нижнее положение. За полный оборот муфты распределителя все шесть пар контактов получают возможность замкнуться, каждая на время to-Однако фактически замыкаются лишь те контакты, у которых контактный рычаг 5 не заперт захватывающим рычагом 4. В свою очередь, положение последнего зависит от положения комбинаторных линеек шифратора, т. е. от набранной комбинации-. Если контактный рычаг 5 свободен (линейка 3 переместилась влево), то контакты замкнутся и в линию будет послан токовый импульс, в противном случае — бестоковый импульс.
В конце оборота расцепляющий выступ 10 наскакивает на конец расцепляющего рычага 13, храповики // и 12 расцепляются и распределительная муфта останавливается.
Движущий механизм (см. рис. 17.9) включает в себя двигатель, peduKTOD и автостоп АС. В аппаоате
ные коллекторные электродвигатели ДТА-40, работающие от сетей постоянного тока напряжением 120+ 10 В или переменного тока напряжением 127 В частотой 50 Гц. Двигателем / через редуктор приводятся в движение главная ось 2, регистровая ось 3 и ось передатчика 4 (рис. 17.12, а).
Для поддержания постоянства частоты вращения оси двигателя применяют центробежный электро-контакгный регулятор (рис. 17.12, б), закрепляемый на оси двигателя 5. На гетинаксовом диске закреплены два контакта: неподвижный 6 и подвижный 7, который спиральной пружиной 8 прижимается к неподвижному. Контакты включаются последовательно в цепь электродвигателя (рис. 17.12, в) через коллекторные кольца.
При вращении оси двигателя на подвижный контакт действует сила натяжения пружины и центробежная сила, значение которой зависит от частоты вращения. Когда центробежная сила становится больше силы натяжения пружины, контакты размыкаются и в цепь двигателя включается добавочное сопротивление. Конденсатор служит для уменьшения искрообразования на контактах при их размыкании. При уменьшении скорости контакты вновь замыкаются.
При изменениях напряжения питающей сети на ±10% неравномерность работы электроконтактного оегулятопя не ппряышярт -4-0.5%.
двигателя
«м—3060
об/мин подбирается
при помощи камертона с собственной
частотой колебаний /к=102
Гц.
При этом частота вращения главной
и регистровой осей с помощью
редуктора понижается до пгл
= лрег
= 462,5 об/мин, а оси передатчика—до
л,1ер
= 400 об/мин, что соответствует
скорости дискретной модуляции
В = 50 Бод.
Двигатель выключается автостопом, если передача или прием не ведется более одной минуты. Последующее включение осуществляется нажатием клавиши ЛАТ клавиатуры.
Приемник (см. рис. 17.9) включает в себя следующие функционально законченные узлы: входное устройство Вх У, регистрирующее устройство Рег У, распределитель приема Рпр, накопитель приема Япр, декодирующее устройство (дешифратор ДШ), стартстопное устройство СТУ, печатающее устройство Печ У, ре-перфоратор РПФ и регистровый механизм Рег М.
Взаимодействие отдельных узлов при приеме информации пояснено на рис. 17.13.
В качестве входного устройстЕ в телеграфных электромеханически аппаратах применяют неполяриз< ванный электромагнит 18, которы преобразует электрические двоичны сигналы в механические. В полож< ние покоя якорь электромагнит отводится спиральной пружино 17. Электромагнит телеграфного аи парата должен иметь высокое бы стродействие (малое время срабать вания fcp^O, l/o) и высокую чувствр тельность (ток срабатывани /cp^0,5ip), которая может изменятьс при изменении натяжения пружиш и зазора между якорем и полюсным наконечниками. Эти два требовг ния — высокое быстродействие и мг лый ток срабатывания — являюто противоречивыми, поэтому при рас чете и конструировании телеграфны. электромагнитов приходится прини мать компромиссные решения.
Приемным распределителем аппа рата является наборная муфта 19 имеющая^так же как и в передатчике шесть кулачков. Однако кулачю в отличие от передающего распреде лителя имеют не скосы, а выступы


л Пять кулачков управляют набором комбинации, а шестой включает печатающее устройство после приема и дешифрации комбинации.
Для пуска и остановки приемного распределителя служит стартстопное устройство (рис. 17.14). Сигналом пуска является начало стартового элемента; остановка производится после отсчета цикла при условии поступления на вход приемника стоповой значащей позиции. Наборная муфта 1 связана с непрерывно вращающейся главной осью фрикци-
^ онным сцеплением 2. Когда из линии поступает стартовый импульс, якорь электромагнита отходит от сердечника и винтом 8 через пусковой штифт 7 действует на промежуточный рычаг 6. Повернувшись на некоторый угол, промежуточный рычаг давит на правое плечо запорного рычага 5 и освобождает стоповую скобу 4. Стоповый крючок 3 поворачивает стоповую скобу, в результате чего наборная муфта / начинает вращаться. При поступлении стопового импульса в конце оборота стоповая скоба 4 будет заперта запорным рычагом 5- и наборная муфта остановится.
, При вращении наборной муфты (см. рис. 17.13) ее кулачки последовательно друг за другом взаимодействуют с соответствующими наборными рычагами 15. Каждый наборный рычаг поворачивается на некоторый угол и перемещает мече-образный рычаг 14 в сторону вилки якоря 16. Ударяясь о грань вилки левым плечом (якорь отпущен), острие мечеобразного рычага перейдет к правому ограничительному
штифту, а при ударе правым плечом (якорь притянут) — к левому ограничительному штифту. Блокировочным механизмом вилка якоря блокируется на время, требуемое для поворота рычага. По окончании взаимодействия кулачка распределителя с наборным рычагом под действием пружины он вместе с мече-образным рычагом возвращается в исходное положение и конец последнего упирается в левое или в правое плечо Т-образного рычага 13. Последний поворачивается и тем самым фиксирует значащую позицию принятого элемента, запоминая (накапливая) ее.
В электромеханических телеграфных аппаратах наибольшее применение находят дешифраторы с линейками. Дешифраторные линейки 11 в отличие от комбинаторных имеют дугообразную форму и прямоугольные вырезы. Пакет из пяти таких линеек, вырезы на которых выполнены согласно кодовой таблице, и является дешифратором. Под управлением Т-образных рычагов 13 линейки располагаются в определенной пространственной комбинации и в определенном месте дуги вырезы совпадут, образуя общий сплошной паз. Тем самым будет выбран нужный символ для печати.