

21.3. Цифровой тахометр с сквт
В том случае, когда в канале преобразования угла используется циклический преобразователь угол — амплитуда — код с СКВТ, цифровой эквивалент скорости может быть сформирован отдельной отсчетной частью по сигналам единого первичного преобразователя.
С целью уменьшения методической составляющей ошибки и увеличения разрешающей способности предложена структура построения, в котором N определяется выражением
![]()
Таким образом, разрешающая способность преобразователя увеличивается . в 2 раза, а диапазон работы при фиксированной методической погрешности расширяется на порядок по сравнению с вариантом запитки СКВТ вращающимся полем, показатели которого были определены в гл. 8.
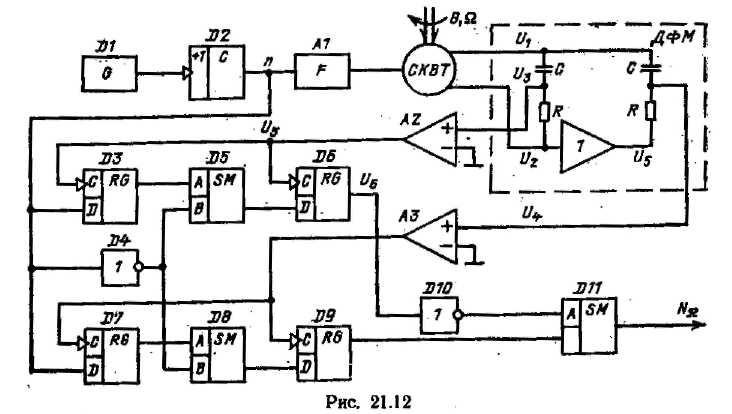
Функциональная
схема преобразователя приведена на
рис. 21.12 [76]. Импульсы
частоты
![]() генератораD1
поступают
на счетчик D2
емкостью
.V,
который
формирует линейно нарастающий код
генератораD1
поступают
на счетчик D2
емкостью
.V,
который
формирует линейно нарастающий код![]() (цифровую «пилу») с периодом
(цифровую «пилу») с периодом![]() (рис.
21.13). Формирователь At
(см.
рис. 21.12) преобразует выходной
сигнал с D2
путем
фильтрации в синусоидальное напряжение
частоты
(рис.
21.13). Формирователь At
(см.
рис. 21.12) преобразует выходной
сигнал с D2
путем
фильтрации в синусоидальное напряжение
частоты![]()
![]() Это
напряжение создает в CКBT
пульсирующее поле, которое наводит
в
его
выходных обмотках напряжения
Это
напряжение создает в CКBT
пульсирующее поле, которое наводит
в
его
выходных обмотках напряжения![]() Эти
напряжения в относительных
единицах можно представить в виде
Эти
напряжения в относительных
единицах можно представить в виде
![]()
Принцип
работы тахометра основан на том, что
напряжения
![]() содержат
две гармонические составляющие: одну
— частоты, равной сумме частот
питания
содержат
две гармонические составляющие: одну
— частоты, равной сумме частот
питания![]() и
вращения
и
вращения
![]() СКВТ,
а вторую — частоты, равной их разно-
СКВТ,
а вторую — частоты, равной их разно-

стн.
Эти составляющие можно выделить при
помощи двойного фазоврашающе-го
моста ДФМ.
Мост
содержит две
![]() цепи
с постоянными времениT=RC=
цепи
с постоянными времениT=RC=
![]() и
инвертирующий усилитель с коэффициентом
усиления, равным
]..Его
выходное напряжение в относительных
единицах
и
инвертирующий усилитель с коэффициентом
усиления, равным
]..Его
выходное напряжение в относительных
единицах
![]()
Выходные напряжения моста в комплексной форме могут быть записаны в виде

где![]() для
первого слагаемого в (21.16) и (21.17);для
для
первого слагаемого в (21.16) и (21.17);для
![]() вто-
вто-
рого слагаемого в (21.16) и (21.17). С учетом (21.16), (21.17) после несложных преобразований из (21.19), (21.20) можно получить выходные напряжения моста в виде (рис. 21.14)

где![]() —
начальные фазы составляющих. Если
—
начальные фазы составляющих. Если![]() то
то
![]()
Измеряя
отклонения периодов
![]() этих
составляющих от периода
этих
составляющих от периода![]()
можно
определить частоту вращения
![]() По
каждой составляющей частоту определяют
с методической погрешностью, близкой
к
По
каждой составляющей частоту определяют
с методической погрешностью, близкой
к
![]() При
вычитании отклонений
периодов частота
При
вычитании отклонений
периодов частота![]() удваивается,
а первые степени отношения
удваивается,
а первые степени отношения![]() погрешности
компенсируются. Измерения проводят в
импульсной форме, для чего
погрешности
компенсируются. Измерения проводят в
импульсной форме, для чего
![]() преобразуют
формирователямиА2
и
A3
в
прямоугольные напряжения
преобразуют
формирователямиА2
и
A3
в
прямоугольные напряжения
![]()
Цифровая отсчетная часть тахометра (рис. 2.1.12) содержит четыре регистра, три сумматора и два инвертора. Регистры D3, D6, D7 и D9 представляют собой параллельные m-разрядные регистры хранения кода, информация в которые записывается в момент прихода на их входы синхронизации фронта импульса. Инверторы D4, D10 выполняют логическую функцию НЕ и служат для получения инверсного кода. Сумматоры D5, D8 и D11 комбинационные параллельные, число разрядов т.
Следует отметить, что функции цифровой отсчетной части D3-D11 тахо-иетра могут выполняться микроЭВМ по соответствующее подпрограмме при наличии резерва машинного времени [68].
Как уже отмечалось, по импульсам генератора счетчик формирует «цифровую пилу», которая описывается выражением
где![]()
![]()
ЦЧ — символ взятия целой части, отражает процесс квантования (в дальнейшем символ ЦЧ опущен).
В момент
времени
![]() фронтом
сигнала
фронтом
сигнала
![]() в
регистр D7
записывается
значение
кода
в
регистр D7
записывается
значение
кода
![]() (рис.
21.13); в момент времени
(рис.
21.13); в момент времени
![]() фронтом
фронтом
![]() в
регистрD3
записывается
значение кода
в
регистрD3
записывается
значение кода![]()
Заметим,
что на выходах счетчика D2
и
регистров D3,
D8
мы
имеем дело только
с положительными числами, максимальное
значение которых, как известно,
равно
![]() Эти
числа представляются прямым m-разрядным
кодом
без знакового разряда. На выходах
сумматоров D5,
D8
и
D11
и
регистров D6,
D9
числа
могут быть как положительными, так и
отрицательными. Они представляются
дополнительным m-разрядным
кодом, причем старший разряд-знаковый.
Диапазон изменения чисел — от
Эти
числа представляются прямым m-разрядным
кодом
без знакового разряда. На выходах
сумматоров D5,
D8
и
D11
и
регистров D6,
D9
числа
могут быть как положительными, так и
отрицательными. Они представляются
дополнительным m-разрядным
кодом, причем старший разряд-знаковый.
Диапазон изменения чисел — от![]() При
переполнении
сумматоров перенос в
При
переполнении
сумматоров перенос в
![]() разряд
отбрасывается. После этогопредварительного
замечания продолжим рассмотрение
работы тахометра.
разряд
отбрасывается. После этогопредварительного
замечания продолжим рассмотрение
работы тахометра.
С помощью инвертора D4 и сумматора D8 на входе регистра 09 формируется код

В момент
времени![]() код
код![]() поскольку
поскольку![]() (рис.
(рис.
21.13), а
![]() Фронтом
записывается
Фронтом
записывается
![]() в
регистр D9,
одновременно
в ре-
в
регистр D9,
одновременно
в ре-
гистр
D7
записывается
число![]() Можно
записать
Можно
записать
![]()
С помощью инвертора D4 и сумматора D5 на входе регистра D6 формируется код

В момент
времени![]() код
код![]() поскольку
поскольку![]() где
где
![]()
![]() Фронтом
Фронтом
![]() записывается
в регистр D6,
одновременно
в регистр D3
записывается
число
записывается
в регистр D6,
одновременно
в регистр D3
записывается
число
![]() Можно
записать
Можно
записать
![]()
В момент
времени
![]() код
код![]() поскольку
поскольку![]() где
где![]()
![]() записывается
в регистр D9,
а
в регистр D7
— число
записывается
в регистр D9,
а
в регистр D7
— число![]()
При
этом значение
![]() совпадает
с (21.29). Далее работа происхо-
совпадает
с (21.29). Далее работа происхо-
дит аналогично.
На
выходной шине с помощью инвертора D10
и
сумматора D11
формируется
потенциальный код
![]() который в
соответствии с полученными соотношениями
(21.29) и (21.31) можно представить в виде
который в
соответствии с полученными соотношениями
(21.29) и (21.31) можно представить в виде
![]()
Таким
образом, алгоритм получения кода
скорости состоит из: 1) вычисления
с помощью регистров D3,
D6
и
сумматора D5
разности![]() 2)
вычисления
посредством регистров D7,
D9
и
сумматора D8
разности
2)
вычисления
посредством регистров D7,
D9
и
сумматора D8
разности![]() 3)
формирования на выходе сумматора D1I
кода
3)
формирования на выходе сумматора D1I
кода![]()
Определяя
из (21.25)
![]() и
из (21.26)
и
из (21.26)
![]() полу-
полу-
чаем цифровой эквивалент скорости
![]()
который
формируется с относительной методической
погрешностью![]() [76].
[76].
Относительная скоростная погрешность
![]()
Исследуя![]() на
экстремум, находим, что при
на
экстремум, находим, что при![]() максимальное
зна-
максимальное
зна-
чение
![]() Для
проверки скоростную погрешность
рассчиты-
Для
проверки скоростную погрешность
рассчиты-
вали по (21.34) и методом итерации по (21.21) и (21.22); результаты расчета сведены в табл. 21.1. Их сопоставление свидетельствует о хорошей сходимости результатов.

Для
общепринятой схемы моста [22]
скоростная
погрешность![]()
![]() т.
е. в этом случае точность значительно
ухудшается. Суммарная
относительная погрешность преобразователя
определяется как сумма методической
и скоростной погрешностей и составляет
т.
е. в этом случае точность значительно
ухудшается. Суммарная
относительная погрешность преобразователя
определяется как сумма методической
и скоростной погрешностей и составляет
![]()
Среднее значение
![]()
Таким
образом, предлагаемое построение
преобразователя позволяет уменьшить
погрешность измерения скорости: для
фазового варианта запитки СКВТ она
примерно равна![]() а
для амплитудногоКроме
а
для амплитудногоКроме![]() того,
существенно
того,
существенно
упрощается источник опорного напряжения, так как необходимо формировать
одно напряжение, к которому предъявляются требования по гармоническому составу. Использование фазовращателя с вращающимся магнитным полем требует многофазной системы опорных напряжений, отвечающих жестким условиям в отношении амплитуды и гармонического состава. При этом можно применять СКВТ, не имеющие выведенной квадратурной обмотки, что расширяет область использования преобразователя. Это особенно важно для БВТ СКВТ с электрической редукцией [48], что позволяет повысить точность н расширить диапазон измерения угла и скорости. Последнее способствует построению без-редукторных сервомеханизмов высокой точности на моментных двигателях, соответствующих современным тенденциям в развитии роботроники [77].
Структурные способы совершенствования ЦПП не исключают алгоритмических методов повышения достоверности формирования цифровых эквивалентов параметров движения, предусматривающих оптимальную фильтрацию сигналов как в аналоговой, так и цифровой форме [3]. В этом плане весьма перспективным является использование в цепях формирования цифровых эквивалентов скорости и ускорения цифровых процессоров аналоговых сигналов ЦПАС [38], обеспечивающих оптимальную фильтрацию и преобразование. Оптимальная обработка цифровых эквивалентов параметров перемещений может производиться и микроЭВМ, обладающей соответствующей производительностью и необходимым программным обеспечением.
ГЛАВА ДВАДЦАТЬ ВТОРАЯ
ЦПП В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ