

20.2. Цпу с Синусно-косинусными и тангенсным фцап
Примером подобного построения является следящий ЦПУ, функциональная схема которого показана на рис. 20.1. В ней применяется один сельсин С с

выходными сигналами в формате СКВТ. В принципе эта система напоминает обычный следящий ЦПУ (см. рис. 14.1), однако в ней предусмотрены две цепи формирования сигналов рассогласования.
Выходные
сигналы сельсина преобразуются
трансформатором Скотта ГС в
формат СКВТ и поступают на селектор
квадрантов СК,
который
обеспечивает
работу преобразователя во всех
квадрантах, подключая к синусному в
косинусному ФЦАП
соответствующие
напряжения. Селектором квадрантов
управляют
два старших разряда 1р
и
2р
выходного
кода угла Ф. Для данного преобразователя
выходной код угла Ф
разбивается
на две части — старшие по весу
разряды Ф1
и
младшие по весу разряды
![]() Старшие
разряды
Старшие
разряды
![]() управляют
синусным В косинусным ФЦАП,
каждый
из которых образует два выходных
сигнала. Если опустить в записи
составляющую несущей частоты
управляют
синусным В косинусным ФЦАП,
каждый
из которых образует два выходных
сигнала. Если опустить в записи
составляющую несущей частоты
![]() то
этими сигналами, как и в обычном следящем
преобразователе, будут
два основных
то
этими сигналами, как и в обычном следящем
преобразователе, будут
два основных![]() и
два дополнительных
и
два дополнительных![]()
![]()
Два других поступают на суммирующий усилитель СУ, в котором формируется сигнал
![]()
![]() Основные
сигналы поступают ва ДУ,
образуя,
так же как и в обычном
следящем преобразователе, сигнал вида
Основные
сигналы поступают ва ДУ,
образуя,
так же как и в обычном
следящем преобразователе, сигнал вида
Разность
двух первых произведений, получаемая
на выходе дифференци
ального
усилителя ДУ,
дает
сигнал рассогласования![]() " с
точностью до
" с
точностью до
![]() —
наибольшее значение напряжения на
аналоговом входе ФЦАП,
соответствующее
значению функции
—
наибольшее значение напряжения на
аналоговом входе ФЦАП,
соответствующее
значению функции
![]() или
или![]() а
л —число старших раз
рядов
выходного кода.
а
л —число старших раз
рядов
выходного кода.
Сумма
двух других произведений дает значение
![]() умножаемое
умножаемое
с помощью
еще одного ФЦАП
на![]() —
компенсирующий угол, соответствующий
m
остальным младшим разрядам выходного
кода. В результате алгебраического
сложения получается суммарный сигнал
рассогласования, сводимый в
системе к нулю:
—
компенсирующий угол, соответствующий
m
остальным младшим разрядам выходного
кода. В результате алгебраического
сложения получается суммарный сигнал
рассогласования, сводимый в
системе к нулю:
![]()
Выходной
сигнал для сравнения с![]() должен
быть пропорцио-
должен
быть пропорцио-
нально уменьшен в
![]() раз. Этим значительно снижается влияние
на сигнал,эквивалентный
л младшим разрядам, аддитивных
составляющих погрешности тангенсвого
ФЦАП,
таких
как наводки и шумы в слабосигнальных
цепях преобразования
младших разрядов. Разрешающая способность
таких преобразователей
может достигать 16—18 разрядов выходного
кода при общей погреш-
раз. Этим значительно снижается влияние
на сигнал,эквивалентный
л младшим разрядам, аддитивных
составляющих погрешности тангенсвого
ФЦАП,
таких
как наводки и шумы в слабосигнальных
цепях преобразования
младших разрядов. Разрешающая способность
таких преобразователей
может достигать 16—18 разрядов выходного
кода при общей погреш-
ности
![]()
Недостатком нреобразователя является использование четырех ФЦАП для синусно-косинусного преобразования и одного ФЦАП для тангенсного преобразования. Это существенно повышает сложность преобразователя. Реализация приближенных зависимостей упрощает построение ФЦАП, но приводит к появлению методических погрешностей, снижающих точность преобразователя угла в код. Наличие в данном варианте ЦПУ трех разновидностей ФЦАП усложняет построение преобразователя в ограничивает его точность.
Сложность этого ЦПП определяется используемым алгоритмом формирования сигнала рассогласования, в котором цифровой эквивалент угла Ф задается в диапазоне полного круга. Одним из путей упрощения двухконтурного следящего ЦПП является использование усеченных алгоритмов формирования, в которых цифровой эквивалент задается в пределах квадранта или октанта [71]. Такой подход не исключает поисков более совершенных вариантов полных алгоритмов формирования сигнала рассогласования [а. с. 1089603 и 1126968 (СССР)], которые наряду с упрощением отсчетной части позволяют уменьшить ее влияние на точностные показатели первичного преобразователя.
20.3. ПРЕОБРАЗОВАТЕЛЬ С ТАНГЕНСНЫМИ ФЦАП
С точки зрения упрощения н дальнейшего повышения разрешающей способности представляет интерес построение отсчетной части ЦПУ, использующей для формирования сигнала рассогласования только тангенсные ФЦАП [71].
Функциональная схема такого ЦПУ представлена на рис. 20.2.


С выхода СКВТ
напряжения
![]() пропорциональные
синусу и косинусу
пропорциональные
синусу и косинусу
угла
поворота 0, поступают на вход селектора
СО,
где
приводятся к первому октанту.
Выходное напряжение
![]() СО
изменяется
от 0 до
СО
изменяется
от 0 до![]() в
нечетных
в
нечетных
октантах
и от
![]() до
0 в четных октантах. Напряжение
до
0 в четных октантах. Напряжение
![]() изменяется
изменяется
![]() в
нечетных октантах в
в
нечетных октантах в![]() в
четных октантах
в
четных октантах
![]() —
амплитуда выходного напряжения СКВТ).
Приведением
напряженна СКВТ
в
СО
управляет
трехразрядный код октантов 1р,
2р, Зр, поступающие
со
стерших разрядов реверсивного двоичного
счетчика СТ2.
—
амплитуда выходного напряжения СКВТ).
Приведением
напряженна СКВТ
в
СО
управляет
трехразрядный код октантов 1р,
2р, Зр, поступающие
со
стерших разрядов реверсивного двоичного
счетчика СТ2.
Работа
СО
поясняется
временными диаграммами на рис. 20.3, где
показаны
изменения выходных напряжений СКВТ,
СО и
старших разрядов кода угла
в зависимости от угла в поворота СКВТ.
Все
напряжения условно показаны
в виде огибающих. Огибающая напряжения
переменного тока считается положительной,
если оно совпадает по фазе с опорным
![]() в
противном случае
— отрицательным,
в
противном случае
— отрицательным,
Отсчетная
часть ЦПУ оперирует с приведенными
напряжениями СКВТ
![]() Они
поступают на УЦАП1
а
УЦАП2,
где
перемножаются со значением
кода
Они
поступают на УЦАП1
а
УЦАП2,
где
перемножаются со значением
кода
![]() с
выходаПЗУ,
который
имеет прошивку, соответствующую коду
тангенса
угла в пределах от 0 до
с
выходаПЗУ,
который
имеет прошивку, соответствующую коду
тангенса
угла в пределах от 0 до![]() На
адресные входыПЗУ
поступает
код
На
адресные входыПЗУ
поступает
код
![]() с
выхода блока элементов ИСКЛЮЧАЮЩЕЕ
ИЛИ. Значение кода
с
выхода блока элементов ИСКЛЮЧАЮЩЕЕ
ИЛИ. Значение кода![]() определяемое
Зр кода октантов, равно Ф, при Зр=0
или
определяемое
Зр кода октантов, равно Ф, при Зр=0
или![]()
при
Зр=1,
где
![]() —старшие
разряды кода угла, число которых равноМ.
На
выходе
ПЗУ
значение
кода
—старшие
разряды кода угла, число которых равноМ.
На
выходе
ПЗУ
значение
кода
![]() будет
равно
будет
равно
![]() при
Зр=0
или
при
Зр=0
или
![]() при
при
Зр=1.
Младшие
разряды кода угла![]() число
которых равно
число
которых равно![]() с
выхода второгоблока
элементов ИСКЛЮЧАЮЩЕЕ ИЛИ поступают
и цифровые входы
с
выхода второгоблока
элементов ИСКЛЮЧАЮЩЕЕ ИЛИ поступают
и цифровые входы
УЦАПЗ.
На
входе УЦАПЗ
значение
кода![]()
![]()
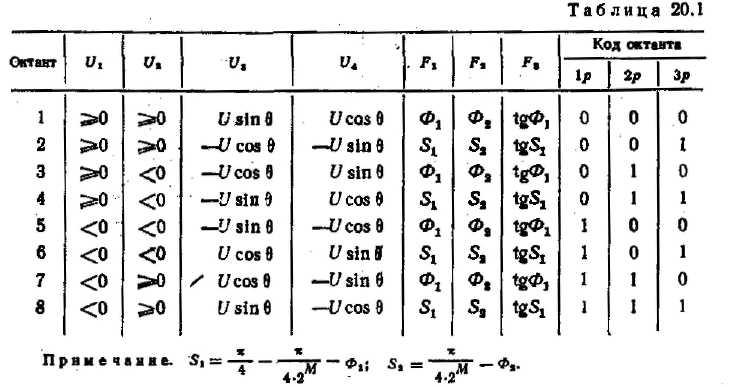
Взаимодействие СО,
блоков элементов
ИСКЛЮЧАЮЩЕЕ ИЛИ и ПЗУ поясняется
табл. 20.1, где приведены значения
соответствующих напряжений а кодов
для всех октантов. Все углы в таблице
соответствуют полным углам, которые
выражаются через приведенные следующим
образом:![]()
![]() где
где![]() —
приведенный угол поворота ротора СКВТ;
л —номер
октанта;
—
приведенный угол поворота ротора СКВТ;
л —номер
октанта;
![]() —приведенный
угол, равный Коду на выходе реверсивногосчетчика
[а. с. Ш6446 (СССР)].
—приведенный
угол, равный Коду на выходе реверсивногосчетчика
[а. с. Ш6446 (СССР)].
На рис,
20.4 показано изменение кодов![]() на
выходе блоков элемен-
на
выходе блоков элемен-
тов ИСКЛЮЧАЮЩЕЕ ИЛИ в зависимости от значения Зр кода октантов.
Напряжение рассогласования
в данном СЦПУ формируется следующим
образом.
С выхода СО
напряжение
![]() поступает
на прямой вход дифференцирующего
усилителя ДУ1,
на
инвертирующий вход которого подано
напря-
поступает
на прямой вход дифференцирующего
усилителя ДУ1,
на
инвертирующий вход которого подано
напря-

жение
с выхода УЦАП1
![]() На
выходе ДУ1
имеется
напряжение рас-
На
выходе ДУ1
имеется
напряжение рас-
согласования
![]() соответствующее
напряжению рассогласования
соответствующее
напряжению рассогласования
обычного одноотсчетного СЦПУ [66].
Дополнительная
цепь формирования сигнала рассогласования
включает в
себя УЦАП2,
СУ, УЦАПЗ и
ДУ2.
На
вход суммирующего усилителя СУ
поступают
напряжения
![]() Напряжение
Напряжение![]() с
выходаСУ
поступает
с
выходаСУ
поступает
на вход
УЦАПЗ,
на
выходе которого формируется напряжение
![]() На-
На-
пряжение![]() с
выходаДУ1
и
напряжение
с
выходаДУ1
и
напряжение![]() поступают
на входДУ2,
на
выходе
которого напряжение рассогласования
поступают
на входДУ2,
на
выходе
которого напряжение рассогласования![]()
Выражая
напряжения
![]() через
значения приведенных напряжений
через
значения приведенных напряжений![]()
и
![]() получаем
получаем
![]()
Подставляя
в (20.1) значения напряжений![]() и
кодов
и
кодов
![]() из
табл. 20.1
из
табл. 20.1
получаем напряжение![]() для
первого октанта:
для
первого октанта:
![]()
Составляющая
несущей частоты![]() для
простоты опущена в записи напря-
для
простоты опущена в записи напря-
жений.
Напряжение![]() для
первого октанте
для
первого октанте
![]()
Так как
для малых углов (До 5°) тангенс угла
приблизительно равен самому углу,
то, заменив в (20.3)
![]() с
учетом (20.1) и (20.2) получим на-
с
учетом (20.1) и (20.2) получим на-
пряжение
рассогласования![]() для
первого октанта:
для
первого октанта:
![]()
С учетом
того, что
![]() можно
представить напряженке
можно
представить напряженке
рассогласования
![]() для
первого октанта:
для
первого октанта:
![]()
Аналогично для второго октанта

Учитывая,
что
![]() получаем для
второго
получаем для
второго
октанта
![]()
Аналогичным
образом нетрудно доказать, что напряжение
рассогласования
![]() определяется
в остальных нечетных октантах в
соответствии с (20.5), а в остальных
четных — в соответствии с (20.9).
определяется
в остальных нечетных октантах в
соответствии с (20.5), а в остальных
четных — в соответствии с (20.9).
Дальнейшая обработка сигнала рассогласования в преобразователе производится устройствами, типичными для следящих ЦПУ [3]. Это ДМ и ФНЧ, осуществляющие выделение постоянной составляющей напряжения рассогласования и формирующие частотную характеристику следящего ЦПУ. Передаточная функция фильтра
![]()
где
![]() —
постоянная времени фильтра низких
частот, а
—
постоянная времени фильтра низких
частот, а![]() —
постоянные
—
постоянные
времени корректирующего
устройства. С выхода фильтра напряжение
рассогласования
управляет частотой ПНЧ.
Полярность
напряжения
![]() определяет,
на
какой вход — суммирования или
вычитания—реверсивного счетчика долж
ны
поступать импульсы с ПНЧ.
определяет,
на
какой вход — суммирования или
вычитания—реверсивного счетчика долж
ны
поступать импульсы с ПНЧ.
Напряжение
![]() одновременно
поступает на выход преобразователя,
характеризуя
скорость Ф изменения выходного угла
преобразователя. Поскольку в астатических
системах для установившегося режима
скоростная ошибка равна нулю,
скорость изменения Ф выходного угла Ф
преобразователя
одновременно характеризует
и скорость изменения в угла поворота
ротора СКВТ.
одновременно
поступает на выход преобразователя,
характеризуя
скорость Ф изменения выходного угла
преобразователя. Поскольку в астатических
системах для установившегося режима
скоростная ошибка равна нулю,
скорость изменения Ф выходного угла Ф
преобразователя
одновременно характеризует
и скорость изменения в угла поворота
ротора СКВТ.
Скорость изменения Ф для установившегося режима
![]()
где
![]() —
величина младшего разряда реверсивного
счетчика, а
—
величина младшего разряда реверсивного
счетчика, а![]() —
частотаимпульсов
на выходе ПНЧ, Она
пропорциональна напряжению
—
частотаимпульсов
на выходе ПНЧ, Она
пропорциональна напряжению![]() и
крутизнеКш
ПНЧ, т.
е.
и
крутизнеКш
ПНЧ, т.
е.![]() Следовательно,
окончательно для скорости изменения'
Следовательно,
окончательно для скорости изменения'
Ф имеем
![]()
Таким
образом, значение напряжения![]() определяется
не только крутизной Кв
ПНЧ,
но
и числом разрядов кода выходного угла,
равного сумме младших и
старших разрядов и кода октантов:
определяется
не только крутизной Кв
ПНЧ,
но
и числом разрядов кода выходного угла,
равного сумме младших и
старших разрядов и кода октантов:
![]()
Напряжение
![]() управляет
работой ПНЧ,
с
выхода которого импульсы
управляет
работой ПНЧ,
с
выхода которого импульсы
поступают
на вход суммирования или вычитания
реверсивного счетчика. Изме-нение
выходного кода младших разрядов
![]() через
блок элементе ИСКЛЮЧАЮЩЕЕ
ИЛИ передается на цифровые входы УЦАП3,
меняет
напряжение
через
блок элементе ИСКЛЮЧАЮЩЕЕ
ИЛИ передается на цифровые входы УЦАП3,
меняет
напряжение
![]() и
и
приводят
к изменению напряжения рассогласования
![]() Если
yгол
Если
yгол
![]() больше
эквивалента
больше
эквивалента![]() то реверсивный счетчик суммирует
импульсы с выхода ПНЧ,
уменьшая
напряжение рассогласования
то реверсивный счетчик суммирует
импульсы с выхода ПНЧ,
уменьшая
напряжение рассогласования![]() Если
угол
Если
угол![]() меньше
эквивалента
меньше
эквивалента
![]() реверсивный
счетчик работает в режиме вычитания,
также уменьшая напряжение
реверсивный
счетчик работает в режиме вычитания,
также уменьшая напряжение
![]() Подсчет
импульсов от ПНЧ
производится
до обнуления напряжения
рассогласования.
Подсчет
импульсов от ПНЧ
производится
до обнуления напряжения
рассогласования.
Если
изменение кода младших разрядов![]() не
сводит к нулю напряжение рассогласования
не
сводит к нулю напряжение рассогласования
![]() то
начинают изменяться старшие разряды
кода
то
начинают изменяться старшие разряды
кода![]() кото-рые
через блок элементов ИСКЛЮЧАЮЩЕЕ ИЛИ
поступают на ПЗУ и с него на
УЦАП1
и
УЦАП
2, Изменение
кода
кото-рые
через блок элементов ИСКЛЮЧАЮЩЕЕ ИЛИ
поступают на ПЗУ и с него на
УЦАП1
и
УЦАП
2, Изменение
кода![]() и
соответственно кода
и
соответственно кода![]() на
выходеПЗУ
приводит
к изменению напряжений
на
выходеПЗУ
приводит
к изменению напряжений![]() и
соответственно напряжения рассогласования.
и
соответственно напряжения рассогласования.
В этом
случае подсчет импульсов от ПНЧ
производится
до тех пор, пока суммарный
код угла Ф,
состоящий
из кода младших разрядов
![]() кода
старших
разрядов
кода
старших
разрядов
![]() и
кода октантов, не станет эквивалентным
углу 9 поворота ротора
СКВТ. Напряжение рассогласования станет
равным нулю, в колебания ПНЧ
прекратятся.
и
кода октантов, не станет эквивалентным
углу 9 поворота ротора
СКВТ. Напряжение рассогласования станет
равным нулю, в колебания ПНЧ
прекратятся.
Методическую
погрешность такого ЦПУ можно определить,
воспользовавшись
выражением (204) для рассогласования
![]() Методическая
погрешность представляет
собой разность между кодом тангенса
угла
Методическая
погрешность представляет
собой разность между кодом тангенса
угла
![]() и
самим кодом угла
и
самим кодом угла![]()
![]()
Эта
погрешность зависит от величины кода
угла
![]() максимальное
значение которого
определяется числом старших разрядов
кода угла
максимальное
значение которого
определяется числом старших разрядов
кода угла
![]() Ограничив
Ограничив
значение методической погрешности ЦПУ половиной величины младшего разряда, можно определить допустимое число N младших разрядов с учетом заданного числа М старших разрядов преобразователя. Величина погрешности с учетом (20.12)
![]()
Максимальное
значение кода угла
![]() тогда
величина погреш-
тогда
величина погреш-
ности![]() с
учетом (20.13)
с
учетом (20.13)
![]()
Из
(20.14) можно получить допустимое число
N
младших
разрядов ЦПУ для заданного
числа М
старших
разрядов при значении
![]() не
превышающем половины
величины младшего разряда:
не
превышающем половины
величины младшего разряда:
![]()
Например, для числа старших разрядов М—5 число N младших разрядов равно 11, что с учетом кода октантов соответствует ЦПУ с разрешающей способностью 19 разрядов.
Достижение столь высокой разрешающей способности позволяет, например, повысить точность управления положением с применением метода обучения при программировании роботов. Как известно [72], особенностью метода обучения является запись в память информации о положении непосредственно с ЦПУ при ручном управления роботом. Такой способ программирования обеспечивает при управлении компенсацию систематической погрешности измерения положения, что позволяет достичь значительно более высокой точности управления положением по сравнению с точностью первичного датчика.
Предлагаемая структура построения следящего ЦПУ позволяет улучшить и динамические показатели ИМС за счет использования выходного напряжения фильтра в качестве сигнала скорости 6 изменения угла 0 при оптимальном управлении. В обычном следящем ЦПУ с разрешающей способностью 12—14 разрядов использование этого напряжения в качестве сигнала скорости для низких частот вращения затруднительно из-за значительных шумов квантования.
20.4. ЦПУ С СИНУСНО-КОСИНУСНЫМ И ЛИНЕЙНЫМ ФЦАП
Определенное упрощение отсчетной части ЦПУ достигается при построения преобразователя [а. с. 1089603 (СССР)], предусматривающем выбор более экономной с точки зрения количества и сложности используемых элементов структуры получения сигналов рассогласования за счет реализации отличающегося от известного алгоритма его формирования. В этом варианте при построении основного контуре формирования сигнала рассогласования используются два ФЦАП: синусный и косинусный вместо четырех в варианте рис. 20.1 и третий ФЦАП служит для формирования сигнала вспомогательного контура из кода дополнительной шкалы.
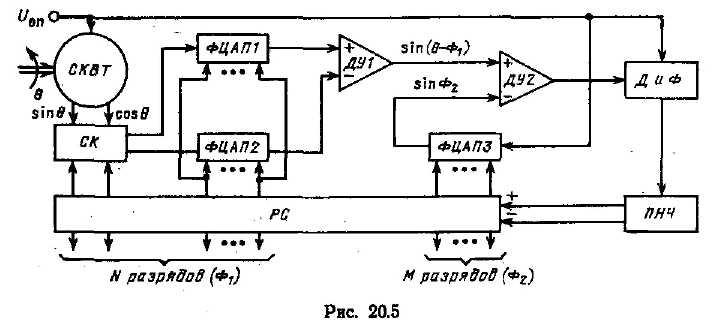
Функциональная схема такого ЦПУ представлена на рис. 20.5. Преобразователь содержит СКВТ, СК, три ФЦАП, два ДУ, демодулятор и фильтр Д н Ф, ПНЧ и реверсивный счетчик PC. Схема работает следующим образом.
Сигналы с выхода СКВТ, пропорциональные синусу и косинусу измеряемого угла, поступают на СК, который по коду двух старших разрядов выходного кода PC вырабатывает на своих аналоговых выходах сигналы, соответствующие тригонометрическим функциям первого квадранта измеряемого угла 0:
![]() Сигнал
Сигнал
![]() подается
на аналоговый вход ФЦАП1,
а
подается
на аналоговый вход ФЦАП1,
а![]()
на
аналоговый вход ФЦАП2,
где
умножается на цифровой код, эквивалентный
соответственно
косинусу и синусу угла![]()
Разность
полученных произведений
![]() . на
выходе
. на
выходе
ДУ1
![]() подается
на неинвертирующий вход ДУ2,
на
инвертирующий
подается
на неинвертирующий вход ДУ2,
на
инвертирующий
вход
которого подается сигнал с выхода
ФЦАПЗ,
представляющий
собой произведение
единичного нормирующего опорного
сигнала на цифровой код синуса угла![]() На
выходе ДУ2
образуется
сигнал рассогласования
На
выходе ДУ2
образуется
сигнал рассогласования![]() детектируемый
и интегрируемый демодулятором, сигнал
с выхода которого управляет
работой ПИЧ,
частота
выходных импульсов которого
пропорциональна
величине сигнала рассогласования.
детектируемый
и интегрируемый демодулятором, сигнал
с выхода которого управляет
работой ПИЧ,
частота
выходных импульсов которого
пропорциональна
величине сигнала рассогласования.
Последовательность
импульсов в зависимости от знака сигнала
рассогласования
поступает на суммирующий или вычитающий
вход PC,
код которого при
полном согласовании соответствует
углу![]()
Функции
демодулятора заключаются в детектировании
и фильтрации сигнала
рассогласования, который представляет
собой колебания с частотой
![]() опорного
сигнала и амплитудой сигнала
рассогласования
опорного
сигнала и амплитудой сигнала
рассогласования
![]()
Такой демодулятор может быть выполнен, например, в виде аналогового умножителя сигналов рассогласования н опорного, выход которого подключен к выходу ФНЧ, при этом на его выходе образуется сигнал постоянного тока, сохраняющий знак рассогласования. Преобразователь проще по сравнению с [3] за счет использования формирования старшей части сигнала рассогласования только двух, ФЦАП вместо четырех и отсутствия третьего дифференциального усилителя.
Вариант реализации ФЦАП представлен на рис. 20.6, -
Его логическая часть совместно с ПЗУ1 и ПЗУ2 преобразует входной п-разрядный цифровой код угла в п-разрядный код, соответствующий тригонометрической функции, а УЦАП осуществляет перемножение этого кода на аналоговый сигнал, поступающий на его аналоговый вход.
В качестве ФЦАПЗ можно использовать линейный умножающий ЦАП в случае, когда число старших разрядов значительно больше числа младших разрядов реверсивного счетчика. Поскольку
![]()
можно
выбрать достаточно малым за счет
увеличениятразрядности кода угла
![]() При
этом ошибка аппроксимации функции
При
этом ошибка аппроксимации функции
![]() в
ЦПУ [3] равная
в
ЦПУ [3] равная

![]()
вдвое
больше ошибки аппроксимации
функции
![]() равной
равной
что подтверждается расчетом:
![]()
К достоинствам такого построения ЦПУ (а. с. 1089603 (СССР)] относится возможность реализации отсчетной части на основе современной элементной базы. Положительным фактором является и то, что реализуемый при этом построении алгоритм формирования сигнала рассогласования
![]()
позволяет более эффективно использовать точностные показатели первичного преобразователя по сравнению с построением ЦПП, использующим усеченный алгоритм формирования сигнала рассогласования [71].
Недостатком
такого ЦПП является необходимость
использования для получения
слагаемого
![]() опорного
сигнала, величина которого оказывает
влияние
на значение сигнала рассогласования,
что в конечном итоге снижает точность.
Повышение точности без существенного
усложнения ЦПП может быть
достигнуто за счет реализации иного
алгоритма формирования сигнала
рассогласования
опорного
сигнала, величина которого оказывает
влияние
на значение сигнала рассогласования,
что в конечном итоге снижает точность.
Повышение точности без существенного
усложнения ЦПП может быть
достигнуто за счет реализации иного
алгоритма формирования сигнала
рассогласования
![]()
Покажем, что это эквивалентно выполнению равенства
![]()
Раскроем
скобки и сгруппируем сомножители при![]()
![]()
Воспользуемся условием![]() и
произведем замену:
и
произведем замену:
![]()
тогда (20.18) примет вид
![]()
Из (20.20) следует, что с учетом (20.19) равенства (20.16) и (20.20) тождественны при выполнении (20.17).
Схема усовершенствованного варианта двухконтурного ЦПП представлена на рис. 20.7 [а. с. 1126988 (СССР)].
Преобразователь содержит СКВТ, УЦАП1 и У ЦАП 2, масштабирующие резисторы MR1 и MR2, дифференциальные усилители ДУ1—ДУЗ, функциональные цифро-аналоговые перемножители ФЦАП1 и ФЦАП2, демодулятор и фильтр Д и Ф, ПНЧ, PC.
Старшие
разряды выходного кода PC
соответствуют
углу![]() младшие
— углу
младшие
— углу![]() РазрядностиФЦАП
и
УЦАП
близки.
РазрядностиФЦАП
и
УЦАП
близки.
Блоки УЦАП1 и УЦАП2 представляют собой линейные двухквадрантные ЦАП, сигнал на выходе которых пропорционален произведению двухполярного аналогового входного сигнала на однополярный входной код.

Преобразователь работает следующим образом.
Предположим,
чтo
угол
![]() зафиксирован
н равен нулю. В этом случае-аналоговые
выходные сигналы УЦАП1
к УЦАП2 также
равны нулю, ДУ1
и ДУ2
работают
как повторители выходных сигналов
СКВТ.
На
выходе Д1
сигнал
соответствует
зафиксирован
н равен нулю. В этом случае-аналоговые
выходные сигналы УЦАП1
к УЦАП2 также
равны нулю, ДУ1
и ДУ2
работают
как повторители выходных сигналов
СКВТ.
На
выходе Д1
сигнал
соответствует![]() а
на выходе ДУ2—sin0
Блоки
ФЦАП1
и
ФЦАП2
умножают
эти сигналы на соответствующую
тригонометрическую функций угла
Ф,
образуя
на своих выходах произведения
соответственно
а
на выходе ДУ2—sin0
Блоки
ФЦАП1
и
ФЦАП2
умножают
эти сигналы на соответствующую
тригонометрическую функций угла
Ф,
образуя
на своих выходах произведения
соответственно![]() 1*
1*
![]() .
Блок ДУЗ
на
своем выходе из этих произведений
формирует сигнал
рассогласования
.
Блок ДУЗ
на
своем выходе из этих произведений
формирует сигнал
рассогласования
![]()
который
демодулятором, фильтром и ПИЧ
преобразуется
в последовательность счетных
импульсов, управляющих кодом на выходе
PC
до
сведения разности к минимуму. В этом
случае преобразователь работает как
ЦПП следящего-типа
без разделения определяемого угла на
две группы по разрядам выходного кода.
Разрешающая способность, а следовательно,
и точность преобразователя определяются
дискретностью формирования счетчиком
угла![]() т.
е. числом разрядов
N.
т.
е. числом разрядов
N.
Сведение
к минимуму сигнала
![]() означает,
что сигнал рассогла-
означает,
что сигнал рассогла-
сования
принял значение в пределах величины
![]() —наибольшей
—наибольшей
значение
сигнала рассогласования, соответствующее
единичному значению
![]() В
пределах этой аналоговой величины
В
пределах этой аналоговой величины
![]() разряды
кода М
разряды
кода М
угла
![]() корректируют
сигнал рассогласования.
корректируют
сигнал рассогласования.
Пусть
угол
![]() изменяется
в соответствии с кодом младших разрядов
свет-чика.
На выходах УЦАП1
и
УЦАП2
образуются
соответственно произведения
изменяется
в соответствии с кодом младших разрядов
свет-чика.
На выходах УЦАП1
и
УЦАП2
образуются
соответственно произведения
![]() которые
масштабируются MR1
и MR2
таким
образом, что бы
наибольшее ях значение, соответствующее
единичному коду угле
которые
масштабируются MR1
и MR2
таким
образом, что бы
наибольшее ях значение, соответствующее
единичному коду угле
![]() равнялось
минимальному рассогласованию сигнала
равнялось
минимальному рассогласованию сигнала
![]() т.
е. величине
т.
е. величине
![]() Другими
словами, МД1
и
MR2
устанавливается
масштаб аналоговых сигналов
рассогласования, корректируемых
изменением угла
Другими
словами, МД1
и
MR2
устанавливается
масштаб аналоговых сигналов
рассогласования, корректируемых
изменением угла![]() в
соответственс
отношением
в
соответственс
отношением![]()
На
выходах ДУ1
и
ДУ2
формируются
сигналы![]()
![]() умножаемые
соответственно ФЦАП1
и
ФЦАП2
на
умножаемые
соответственно ФЦАП1
и
ФЦАП2
на![]()
В результате сигнал рассогласования на выходе ДУ3 (рис. 20.7)
![]()
Таким образом, алгоритм формирования сигнала рассогласования допускает применение только линейных УЦАП и не использует опорный сигнал при формировании корректирующих сигналов, связанных с изменением угла Ф2, что повышает точность преобразования по сравнению с вариантом ЦПП, схема которого представлена на рис. 20.5.
Достоинство усовершенствованного варианта ЦПП заключается в возможности получить относительно простыми средствами высокую точность преобразования независимо от уровня опорного сигнала, который практически может изменяться в широких пределах.