

14.3. Амплитудный цпу с переменной структурой
Выбор оптимального типа
преобразователя для конкретного
применения — трудная
задача, усложняемая рядом противоречивых
ограничений. Последние определяются
возможностями, достоинствами и
недостатками каждого типа, Перспективным
является адаптивный тип преобразователя.
Рассмотрим его амплитудный
вариант, обладающий расширенными
возможностями и преимуществами
исходных типов. Алгоритм его работы
меняется посредством перестройки
структуры в функции ошибки преобразования
[а.с 1116446 (СССР)]. Для
повышения быстродействия в переходных
режимах в состав преобразователя
(рис. 14.7) введен блок переключения
режимов БПР,
осуществляющий
перевод
отсчетной части ЦПУ
при
больших рассогласованиях в режимах
поразрядного
уравновешивания. Границы переключения
формируются компараторами,
на сигнальные входы которых поступает
выходной сигнал![]() от
ФЧВ,
а
на опорные — напряжения
от
ФЧВ,
а
на опорные — напряжения
![]() от
ИОН. Эти напряжения определяются
требуемыми переходными характеристиками
ЦПУ
для
известных входных
воздействий. Выходные сигналы
от
ИОН. Эти напряжения определяются
требуемыми переходными характеристиками
ЦПУ
для
известных входных
воздействий. Выходные сигналы
![]() компараторов
объединяются
схемой 2И —ИЛИ, выходной сигнал которой
компараторов
объединяются
схемой 2И —ИЛИ, выходной сигнал которой
![]() формируется
в соответствии
с логическим выражением
формируется
в соответствии
с логическим выражением
![]() —выходной
сигнал
завершения преобразования регистра.
—выходной
сигнал
завершения преобразования регистра.
Напряжение
![]() поступает
на вход одновибратора ОВ,
формирующего
поступает
на вход одновибратора ОВ,
формирующего
Импульс запуска регистра последовательных приближений РПП, который начи-нает работать с тактовой частотой ГЦ, Последовательно, начиная со старшего разряда, к информационным входам PC подключаются соответствующие раз-

ряды
РПП.
Их
состояние определяется выходным
сигналом
![]() компараторов
по
информационному входу РПП,
На
сигнальный вход соответствующего
компаратора
поступает сигнал
компараторов
по
информационному входу РПП,
На
сигнальный вход соответствующего
компаратора
поступает сигнал![]() который
сравнивается с нулем. Код РПП
изменяется
таким образом, чтобы
который
сравнивается с нулем. Код РПП
изменяется
таким образом, чтобы
![]() стремилось
к нулю. Появление сигнала
стремилось
к нулю. Появление сигнала![]() соответствует
возвращению преобразователя в режим
слежения и готовности, к
отработке следующего изменения входного
воздействия.
соответствует
возвращению преобразователя в режим
слежения и готовности, к
отработке следующего изменения входного
воздействия.
Схемное построение (рис 14.7) предусматривает существенное уменьшение-времени установления отсчетной части за счет автоматического измененая структуры электронной, следящей системы в переходных режимах. Меняется ее алгоритм функционирования: из режима пропорционального управления она при больших рассогласованиях переводится в релейный режим. С точке зрения теории автоматического управления применение БПР аналогично введению логического нелинейного корректирующего устройства. В этом случае ЦПУ становится адаптивным.
Рассмотрим
работу преобразователя при скачке угла
поворота 0 ротора. СКВТ.
В
этом случае напряжение![]() на
выходеДУ
значительно,
соответственно
и напряжение
на
выходеДУ
значительно,
соответственно
и напряжение![]() на
выходеФЧВ
также
велико, а полярность его определяется
отставанием или опережением цифрового
значения кода
на
выходеФЧВ
также
велико, а полярность его определяется
отставанием или опережением цифрового
значения кода
![]() относительно
угла
относительно
угла
![]() Работу
преобразователя в этом случае
определяет БПРГ
на
первые входы компараторов которого
поступает напряжение
Работу
преобразователя в этом случае
определяет БПРГ
на
первые входы компараторов которого
поступает напряжение
![]() с
выхода ФЧВ.
На
вторые входы компараторов подаются
напряжения
с
выхода ФЧВ.
На
вторые входы компараторов подаются
напряжения
![]() которые-задают
порог их срабатывания. При этом
которые-задают
порог их срабатывания. При этом
![]() а
их значения выбираются
в зависимости от требуемого
времени установления преобразователя.
в
следящем режиме и допустимых изменений
угла 0 поворота ротора СКВТ
при
включениях, сбоях и резких изменениях.
При превышении напряжением
а
их значения выбираются
в зависимости от требуемого
времени установления преобразователя.
в
следящем режиме и допустимых изменений
угла 0 поворота ротора СКВТ
при
включениях, сбоях и резких изменениях.
При превышении напряжением![]() порога
срабатывания
порога
срабатывания
![]() одного
из компараторов он срабатывает
и выходное
напряжение
одного
из компараторов он срабатывает
и выходное
напряжение![]() поступает
на вход элемента И — ИЛИ. С выхода
элемента И — ИЛИ сигнал
поступает
на вход элемента И — ИЛИ. С выхода
элемента И — ИЛИ сигнал![]() поступает
на входОВ,
который
формирует' импульс
запуска РПП.
поступает
на входОВ,
который
формирует' импульс
запуска РПП.
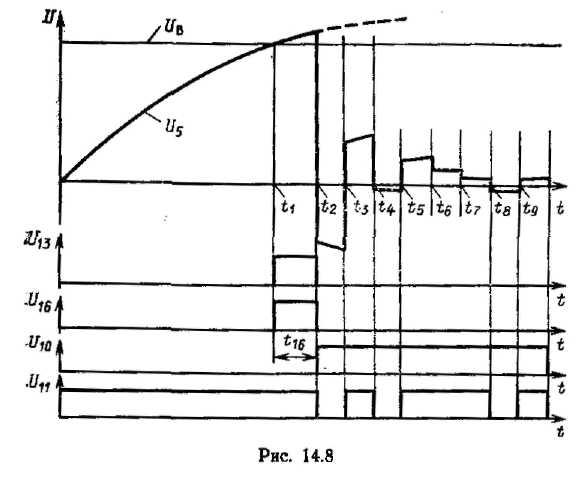
Работа БПР поясняется временными диаграммами на рис. 14.8.
В момент
времени
![]() напряжение
рассогласования превышает порог
сра-батывания
напряжение
рассогласования превышает порог
сра-батывания
![]() компаратора,
на его выходе появляется напряжение
компаратора,
на его выходе появляется напряжение
![]() соот-
соот-
ветствующее
1, которое поступает на первый вход
элемента И — ИЛИ, на вто-рой
вход которого идет инвертированный
сигнал завершения преобразованы. В
результате на выходе элемента И — ИЛИ
появляется напряжение![]() соответствующее
1, которое запускает ОВ.
С
его выхода на вход запуска РПП
поступает
импульс длительностью
соответствующее
1, которое запускает ОВ.
С
его выхода на вход запуска РПП
поступает
импульс длительностью
![]() В
момент времени
В
момент времени
![]() на
втором выходе-РПП
появляется
напряжение
на
втором выходе-РПП
появляется
напряжение![]() соответствующее
1, которое поступает на вход,загрузки
кода PC
и
останавливает его. Инвертированное
значение напряжения
соответствующее
1, которое поступает на вход,загрузки
кода PC
и
останавливает его. Инвертированное
значение напряжения
![]() блокирует
прохождение напряжений
блокирует
прохождение напряжений
![]() на
выход элемента И
— ИЛИ до завершения полного цикла
преобразования. С момента временя t2
РПП
начинает
работать с тактовой частотой ГИ,
последовательно,
начиная со
старшего разряда, подключая к
информационный входам PC
соответствующие
разряды, состояние которых определяется
компаратором, выход которого-подключен
к информационному входу РПП.
Первый
вход компаратора подключен
к выходу ДУ,
на
второй вход подано опорное напряжение,
равное нулю.
на
выход элемента И
— ИЛИ до завершения полного цикла
преобразования. С момента временя t2
РПП
начинает
работать с тактовой частотой ГИ,
последовательно,
начиная со
старшего разряда, подключая к
информационный входам PC
соответствующие
разряды, состояние которых определяется
компаратором, выход которого-подключен
к информационному входу РПП.
Первый
вход компаратора подключен
к выходу ДУ,
на
второй вход подано опорное напряжение,
равное нулю.
В момент
времени![]() РПП
включает свой первый старший разряд,
которыйпоступает
на информационный вход PC
я
проходят на его выход, так как на
входе загрузки присутствует разрешающий
сигнал
РПП
включает свой первый старший разряд,
которыйпоступает
на информационный вход PC
я
проходят на его выход, так как на
входе загрузки присутствует разрешающий
сигнал
![]() соответствующий
1.
соответствующий
1.
С выхода
PC
этот
разряд поступает на вход ФКТК
и
с его выхода на цифровой
вход УЦАП,
на
выходе которого появляется напряжение
![]() значение
Которого
определяется кодом на цифровом входе
УЦАП.
Напряжение
значение
Которого
определяется кодом на цифровом входе
УЦАП.
Напряжение
![]() посту-пает
на второй вход ДУ,
где
вычитается из напряжения
посту-пает
на второй вход ДУ,
где
вычитается из напряжения![]() в
результате формнру-ется
напряжение рассогласования
в
результате формнру-ется
напряжение рассогласования
![]() полярность
которого определяет состоя-ние
выхода
полярность
которого определяет состоя-ние
выхода
![]() компараторов.
В момент времени
компараторов.
В момент времени
![]() РПП
подключает
следую-
РПП
подключает
следую-
щий
разряд к информационному входу PC
и отключает первый старший разряд,
так как на выходе компаратора до
момента![]() сохраняется
низкое значение
напряжения
сохраняется
низкое значение
напряжения
![]() Соответственно
изменяется состояние кода и на выходе
PC,
так
как на входе загрузки присутствует
разрешающий сигнал
Соответственно
изменяется состояние кода и на выходе
PC,
так
как на входе загрузки присутствует
разрешающий сигнал
![]() соответствующий
1. С выхода PC
новое
значение кода поступает на вход ФКТК
и
с его выхода—на цифровой вход УЦАП.
На
выходе УЦАП
появляется
новое
значение напряжения
соответствующий
1. С выхода PC
новое
значение кода поступает на вход ФКТК
и
с его выхода—на цифровой вход УЦАП.
На
выходе УЦАП
появляется
новое
значение напряжения
![]() которое
вычитается из напряжения
которое
вычитается из напряжения![]() и
на выходе ДУ
появляется
новое значение напряжения рассогласования
и
на выходе ДУ
появляется
новое значение напряжения рассогласования![]() полярность
которого определяет состояние выхода
полярность
которого определяет состояние выхода
![]() компаратора.
При этомнапряжение
рассогласования
компаратора.
При этомнапряжение
рассогласования
![]() уменьшается
по абсолютной величине. В момент
времени
уменьшается
по абсолютной величине. В момент
времени
![]() РПП
подключает
следующий разряд, не изменяя состояния
предыдущего,
так как на выходе
РПП
подключает
следующий разряд, не изменяя состояния
предыдущего,
так как на выходе
![]() компараторов
сохранилось напряжение
компараторов
сохранилось напряжение
![]() соответствующее
1. При этом напряжение рассогласования
еще более уменьшается.
В последующие моменты времени
соответствующее
1. При этом напряжение рассогласования
еще более уменьшается.
В последующие моменты времени![]() РПП
изменяет
значение
РПП
изменяет
значение

хода в
соответствии с выходным напряжением
компаратора таким образом, чтобы
напряжение рассогласования
![]() стремилось
к нулю.
стремилось
к нулю.
На рис
14.8 условно показано, что регистр
последовательных приближений имеет
восемь разрядов в соответственно восемь
рабочих тактов![]() По
окончании последнего такта в момент
времени
По
окончании последнего такта в момент
времени
![]() сигнал
завершения преобразования
становится равным нулю, разрешая работу
PC
в
счетном режиме,
в преобразователя — в следящем режиме.
При переходе в следящий режвм
на выходе PC
фиксируется код
сигнал
завершения преобразования
становится равным нулю, разрешая работу
PC
в
счетном режиме,
в преобразователя — в следящем режиме.
При переходе в следящий режвм
на выходе PC
фиксируется код![]() цифровое
значение которого равно
цифровое
значение которого равно
углу
поворота ротора СКВТ,
приведенному
в первый октант. Инверсное значение
напряжения
![]() поступает
на второй и четвертый входы элемента
И—ИЛИ,
разрешая прохождение напряжений
поступает
на второй и четвертый входы элемента
И—ИЛИ,
разрешая прохождение напряжений
![]() на
его выход пря последующих
скачках угла поворота ротора СКВТ.
на
его выход пря последующих
скачках угла поворота ротора СКВТ.
Время
установления преобразователя определяется
как числом разрядов РПП,
которое
равно числу разрядов PC,
так и длительностью одного такта
преобразования,
которая ограничивается временем
установления напряжения яа
выходе УЦАП.
Максимальное
время
![]() установления
преобразователя с
точностью до значения младшего разряда
равно
установления
преобразователя с
точностью до значения младшего разряда
равно

где![]() —частота
опорного напряжения:
—частота
опорного напряжения:![]() —время
определяющее длитель-ность
импульса преобразователя;
—время
определяющее длитель-ность
импульса преобразователя;
![]() —время
одного такта преобразования;п
— число
разрядов РПП.
При
частоте опорного напряжения 400
Гц
—время
одного такта преобразования;п
— число
разрядов РПП.
При
частоте опорного напряжения 400
Гц
![]() числе
разрядов РПП п=10,
времени одного такта
числе
разрядов РПП п=10,
времени одного такта![]()
и
времени![]() ьремя
установления равно
ьремя
установления равно![]() что
на несколь-
что
на несколь-
ко порядков меньше времени, необходимого для преобразователя, работающего только в следящем режиме.
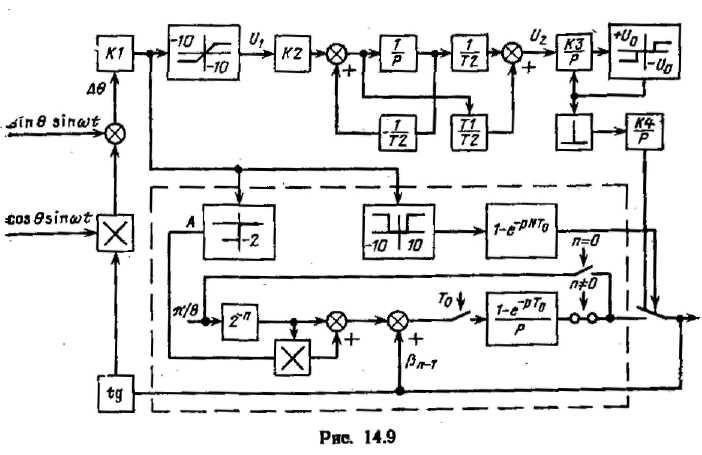
Линейная модель следящего преобразователя [65] не может в достаточной мере отразить особенности динамики адаптивного преобразователя, являющегося нелинейной системой. Оценка динамических свойств отсчетной части произведена цифровым моделированием по схеме рис. 14.9 в соответствии с алгоритмом расчета, представленным на рис. 14.10.
По результатам моделирования построены переходные характеристики следящего (кривая а) и адаптивного (кривая б) преобразователей (рис. 14.11). Сопоставление их свидетельствует об эффективности предложенного построения в части снижения времени установления: оно уменьшилось на три порядка [66]. Экспериментальная проверка подтвердила достоверность результатов моделирования.
В
заключение следует отметить, что при
соответствующем построении следящего
ЦПП в его отсчетной части можно
формировать и цифровой эквивалент
скорости
![]() входного
воздействия
входного
воздействия
![]() Код
скорости можно получить в
режиме слежения преобразованием
аналогового сигнала на выходе фильтра
низкой
частоты ЦПУ с помощью АЦП (см. рис. 14.7).
Такой ЦПП обеспечивает
решение комплексной задачи получения
цифровых эквивалентов угла и скорости,
что необходимо в микропроцессорных
САУ роботами и манипуля-торами
при реализации оптимальных алгоритмов
управления перемещением (68,72—74].
Код
скорости можно получить в
режиме слежения преобразованием
аналогового сигнала на выходе фильтра
низкой
частоты ЦПУ с помощью АЦП (см. рис. 14.7).
Такой ЦПП обеспечивает
решение комплексной задачи получения
цифровых эквивалентов угла и скорости,
что необходимо в микропроцессорных
САУ роботами и манипуля-торами
при реализации оптимальных алгоритмов
управления перемещением (68,72—74].
ГЛАВА ПЯТНАДЦАТАЯ МНОГОКАНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ