

11.1. Основные структуры построения
Эта разновидность ЦПП в отличие от рассмотренных ранее не содержит арктангенсного преобразователя. Такие ЦПП характеризуются простотой, уме-ренной точностью и низкой устойчивостью к температурным воздействиям. Структурная схема простейшего варианта такого ЦПП представлена на рис. 11,1,а [81].
Отсчетная
часть является замкнутой нелинейной
аналого-цифровой системой, которая
в пределах первого октанта решает
уравнение
![]()
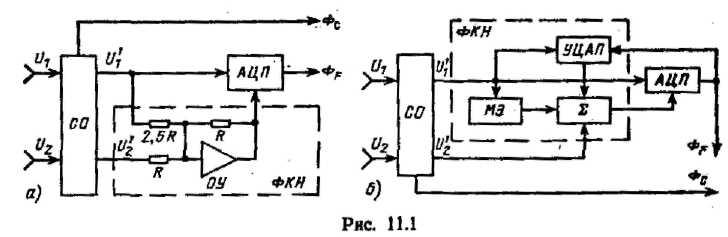
Устройство
содержит СО, АЦП
и
формирователь компенсационного
напряжения
ФКН,
который
комбинирует выходные аналоговые
сигналы![]() и
формирует компенсационное напряжение
и
формирует компенсационное напряжение
![]() Зависимость
методи-
Зависимость
методи-
ческой
ошибки от угла при![]() в
пределах первого октанта имеет максимум,близкий
к
в
пределах первого октанта имеет максимум,близкий
к![]() За
счет разброса номиналов резисторов,
их изменения в температурном
диапазоне и во времени погрешность
преобразования возрастает. Поэтому
такая
схема может использоваться в ЦПП с
низкими требованиями по точности.
За
счет разброса номиналов резисторов,
их изменения в температурном
диапазоне и во времени погрешность
преобразования возрастает. Поэтому
такая
схема может использоваться в ЦПП с
низкими требованиями по точности.
В случае
повышенных требований к точности и
быстродействию ЦПП преобразование
выходных сигналов![]() может
быть реализовано на линейном
АЦП с внешним источником эталонного
сигнала [а. с. 283701 (СССР)]. При
этом обеспечивается существенное
упрощение ЦПП, схема которого представлена
на рис. 11.1,б.
может
быть реализовано на линейном
АЦП с внешним источником эталонного
сигнала [а. с. 283701 (СССР)]. При
этом обеспечивается существенное
упрощение ЦПП, схема которого представлена
на рис. 11.1,б.
На
измерительный вход АЦП
отношений
поступает сигнал с синусного выхода
СО,
а
на эталонный—с выхода сумматора![]() На
первый вход сумматорапоступает
сигнал
На
первый вход сумматорапоступает
сигнал![]() с
косинусного выхода СО,
а
на второй — сигнал
с
косинусного выхода СО,
а
на второй — сигнал
![]() с
выхода УЦАП,
производящего
умножение синусного выхода СО
на цифровой эквивалент
с
выхода УЦАП,
производящего
умножение синусного выхода СО
на цифровой эквивалент![]() в
пределах первого октанта. Таким образом
формируется сигнал
в
пределах первого октанта. Таким образом
формируется сигнал
![]() подаваемый
на эталонный вход АЦП
отношений.
На его выходе формируется сигнал
подаваемый
на эталонный вход АЦП
отношений.
На его выходе формируется сигнал
![]()
Для
![]() абсолютная
разность
абсолютная
разность![]() не
превышает 0,0008 рад, т. е.
не
превышает 0,0008 рад, т. е.
![]()
В том
случае, когда необходимо повысить
точность ЦПП, методическая ошибка
может быть уменьшена посредством
коррекции за счет введения масштабирующего
элемента МЭ,
который
формирует на третьем входе сумматора
сяг-нал![]() Аналогично
изложенному выше имеем
Аналогично
изложенному выше имеем

Улучшение показателей ФКН производится' ва счет комплексного использо-вания технологических усовершенствований в производстве элементов и улучшения законов аппроксимации.
Примером
может служить ФКН ЦПП по [а. с. 217076
{СССР)], в котором применена
аппроксимирующая зависимость, аналогичная
нагруженному потенциометру.
Введение участков аппроксимации снижает
методическую погрешность
ЦПП, которая при трех участках
аппроксимации составляет![]()
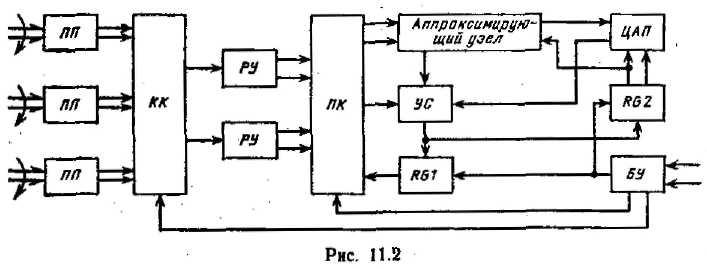
Эффективность
такого подхода повысилась с появлением
презиционных наборов
резисторов в одной сборке (резистивной
матрице) [25, 38]. Это наглядно иллюстрируется
на примере ЦПУ (рис. И.2) [а. с. 260979 (СССР)]
с реализацией
зависимости
![]() —
постоянные коэффициенты
на каждом участке аппроксимации. Эти
коэффициенты, реализованы в
прецизионной резисторной сборке типа
К301HP10
в виде групп масштабных резисторов
для подключения к операционному
усилителю. Номер участка включается
трехразрядным кодом, представляющим
три старших разряда внутри-октантного
кода. Поэтому подключение участка не
увеличивает общего времени: преобразования.
Опорное напряжение формируется из
суммы модулей обоих сигнальных
напряжений. Схема преобразователя
(рис. 11.2) работает следующим образом.
—
постоянные коэффициенты
на каждом участке аппроксимации. Эти
коэффициенты, реализованы в
прецизионной резисторной сборке типа
К301HP10
в виде групп масштабных резисторов
для подключения к операционному
усилителю. Номер участка включается
трехразрядным кодом, представляющим
три старших разряда внутри-октантного
кода. Поэтому подключение участка не
увеличивает общего времени: преобразования.
Опорное напряжение формируется из
суммы модулей обоих сигнальных
напряжений. Схема преобразователя
(рис. 11.2) работает следующим образом.
Входные синусно-косинусные напряжения первичных преобразователей ПП поступают на коммутатор каналов КК, который управляется адресными сигналами, проходящими через блок управления БУ для синхронизации с сетевым напряжением. По адресному сигналу синусно-косинусные напряжения через КК поступают к развязывающим усилителям РУ, которые обеспечивают на своих выходах равные по амплитуде и противоположные по фазе напряжения. Выполнение этого требования необходимо для формирования питания цепи обратной. связи преобразователя синфазными напряжениями, поступающими от входной цели.
Парафазные
напряжения от РУ
поступают
к переключателю квадрантов ПК,
который
управляется от БУ
тактовыми
сигналами. В первом и втором тактах
происходит
последовательное подключение синусного
я
косинусного
напряжений к
устройству сравнения УС,
где
происходит их сравнение с нулевым
потенциалом.
Результат сравнения фиксируется в
регистре![]() в
виде значений двух старших разрядов.
Полученные значения этих разрядов
позволяют установить последующий
порядок включения ПК,
который
обеспечивает в третьем такте сравнение
синусного и косинусного напряжений
между собой.
в
виде значений двух старших разрядов.
Полученные значения этих разрядов
позволяют установить последующий
порядок включения ПК,
который
обеспечивает в третьем такте сравнение
синусного и косинусного напряжений
между собой.
Таким
образом, первые три такта
позволяют
определить положение кодируемого
вала с точностью до 45°, что отражается
значением трехразрядного кода
в
![]() устанавливающего
во включенное положение такие из ключей
ПК,
устанавливающего
во включенное положение такие из ключей
ПК,
которые обеспечивают подключение к УС и аппроксимирующему узлу соответствующих фаз входных напряжений.
Включение
цепи обратной связи в третьем такте
происходит подключением ЦАП. Последующее
преобразование, протекающее во время
4—13 тактов, происходит с применением
контура обратной связи, состоящего из
аппроксимирующего
узла, ЦАП и регистра![]() При
выбранном числе участков аппроксимации
ЦАП
имеет методическую ошибку 0,06 %.
При
выбранном числе участков аппроксимации
ЦАП
имеет методическую ошибку 0,06 %.
Использование более сложной аппроксимирующей зависимости
![]()
которая
с учетом того, что![]()
![]() может
быть приведена к виду
может
быть приведена к виду
![]()
позволяет
снизить методическую ошибку до![]() [81].
[81].
Дальнейшее снижение методической ошибки может быть достигнуто в ЦПП [а. с. 355640 (СССР)], где с помощью ФКН решается зависимость
![]()
По мере изменения угла поворота и перехода в другие октанты выполняется чередование синусно-косинусных зависимостей с учетом фазы, выраженной знаком в приведенном уравнении.
На рис. 11.3 показана функциональная схема такого устройства.
Схема содержит коммутатор каналов КК, развязывающие усилители РУ1—РУ4, коммутатор октантов КО, блоки масштабных делителей МД1—МДЗ,
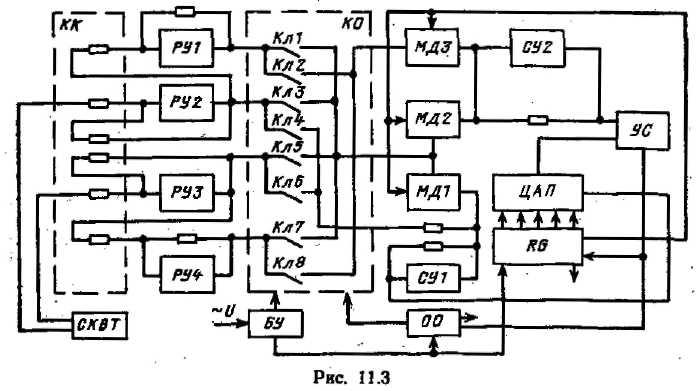
ЦАП,
устройство
сравнения УС,
суммирующие
усилители СУ1
в
СУ2,
регистр
управления
![]() логическую
схему определения октантов 00
и
блок управления
БУ.
логическую
схему определения октантов 00
и
блок управления
БУ.
От СКВТ
через
выбранный по адресному сигналу канал
КК
синусное
в косинусное
напряжения поступают к РУ,
на
которых они одновременно приобретают
одинаковые значения в прямое и обратной
фазах. Полученные пара-фазные
напряжения поступают к КО,
Кл1—Кл8
которого
включаются по тактовым
сигналам. В момент прохождения напряжения
вблизи амплитудного значения
БУ
формирует
серию тактовых сигналов, которые
обеспечивают последовательное
включение переключателей в КО
и
поразрядное переключение![]()
Включение Кл1—Кл8 во время первых трех тактов происходит без участия ЦАП, т. е. при разомкнутой компенсационной цели.
Последующее преобразование, начиная с четвертого такта, выполняется путем поразрядного уравновешивания при последовательном переключении разрядов на ЦАП. По мере сравнения суммарного входного напряжения в
![]() формируется
код, пропорциональный углу в пределах
найденного октанта. Компенсационное
напряжение формируется из суммы
синусного напряжения, включенного
к суммирующему усилителю через блок
МД1,
и
косинусного напряжения,
включенного к этому усилителю с
коэффициентом передачи, равным
1.
формируется
код, пропорциональный углу в пределах
найденного октанта. Компенсационное
напряжение формируется из суммы
синусного напряжения, включенного
к суммирующему усилителю через блок
МД1,
и
косинусного напряжения,
включенного к этому усилителю с
коэффициентом передачи, равным
1.
Разделение
аргумента на четыре равные части в
диапазоне изменения функции 0—1 н
получение четырех значений каждого из
коэффициентов а,
b
и
с
создает
возможность приближения с методической
ошибкой, не превышающей
0,025%, что в угловой мере составляет![]()