

18.2. Функциональный цпу с параллельным преобразованием
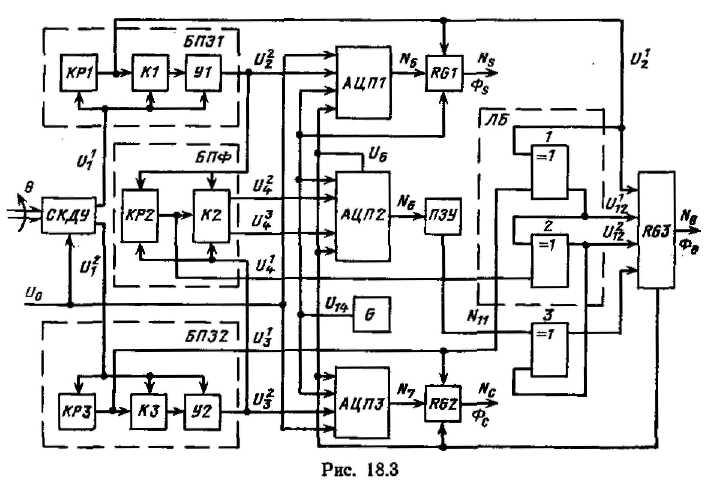
При умеренных требованиях к точности получения кодов проекций и повышенных требованиях к быстродействию ЦПУ рациональным является построение ЦПУ (рис. 18.3), предусматривающее параллельное получение кодов угла и его проекций. Такие требования предъявляются к ЦПУ, формирующим сигналы обратной связи в безредукторных цифровых приводах роботов [68).
Повышение быстродействия преобразователя достигается за счет того, что выходные сигналы СКДУ, приведенные в первый квадрант двумя блоками перемены знака и в первый октант блоком перемены функций, преобразуются одновременно тремя АЦП в коды модулей синуса и косинуса угла СКДУ

На рис. 18.4 приведены диаграммы, поясняющие работу предлагаемого преобразователя.
Преобразователь
содержит СКДУ,
два
блока перемены знака БП31
и
ВПЗ2,
блок
перемены функций БПФ,
три
АЦП1—АЦПЗ,
три
регистра RG1—
RG3,
ПЗУ, логический
блок ЛБ,
блок
элементов ИСКЛЮЧАЮЩЕЕ ИЛИ1, генератор
импульсов
![]() три
компаратора К.1
— КЗ, три
коммутатора КР1
—
КРЗ,
два
усилителя У1
и
У2,
два
элемента 2
и
3
ИСКЛЮЧАЮЩЕЕ
ИЛИ. Введены
следующие обозначения: 0 —угол поворота
СКДУ;
три
компаратора К.1
— КЗ, три
коммутатора КР1
—
КРЗ,
два
усилителя У1
и
У2,
два
элемента 2
и
3
ИСКЛЮЧАЮЩЕЕ
ИЛИ. Введены
следующие обозначения: 0 —угол поворота
СКДУ;
![]() —угол
0, приведенный
в первый октант;
—угол
0, приведенный
в первый октант;
![]() —нормированное
напряжение питанияСКДУ;
—нормированное
напряжение питанияСКДУ;
![]() —
соответственно напряжение и двоичный
код на
—
соответственно напряжение и двоичный
код на![]() выходе
выходе![]() элемента;
m
— разрядность АЦП.
элемента;
m
— разрядность АЦП.
Выходные
сигналы СКДУ![]() подключены
к входам БП31
и
БП32,
идентичных
по построению и состоящих из компараторов
KI
и
КЗ
типа
К521САЗ, коммутаторов К1
и
КЗ
ИМС
типа К590КН4 и усилителей У1
в У2 ИМС
типа К153УД6. Напряжения
подключены
к входам БП31
и
БП32,
идентичных
по построению и состоящих из компараторов
KI
и
КЗ
типа
К521САЗ, коммутаторов К1
и
КЗ
ИМС
типа К590КН4 и усилителей У1
в У2 ИМС
типа К153УД6. Напряжения
![]() сравниваются
на К1
и
КЗ с
нулевым уровнем напряжения, в результате
чего на первых выходах БП31
и
БП32
формируются
логические сигналы, соответствующие
знакам синусного н
косинусного напряжений
сравниваются
на К1
и
КЗ с
нулевым уровнем напряжения, в результате
чего на первых выходах БП31
и
БП32
формируются
логические сигналы, соответствующие
знакам синусного н
косинусного напряжений
![]()
Нулевой
уровень
![]() соответствует
положительному, а единичный — от-
соответствует
положительному, а единичный — от-
рицательному
значению напряжений![]() Коммутаторы
KPI
и
КРЗ
управ-
Коммутаторы
KPI
и
КРЗ
управ-
ляются
по
знаку функций, выявленному на К1
и
КЗ.
Тем
самым при![]()
![]() в
усилителях У1
и
У2
обеспечивается
прямая, а при
в
усилителях У1
и
У2
обеспечивается
прямая, а при![]()
инверсная
передача напряжении на вторые выходы
БП31
и
БП32,
т.
е. формируются
модули напряжений![]()
![]()
Сигналы
со вторых выходов БП31
и
БП&2
подключены
к первому и второму входам
БПФ,
состоящего
из компаратора К2
и
коммутатора КР2.
Напряжения
![]() сравниваются
на К2,
в
результате чего на первом выходе БПФ
формируется
логический сигнал
сравниваются
на К2,
в
результате чего на первом выходе БПФ
формируется
логический сигнал![]() принимающий
значения
принимающий
значения
![]()
Коммутатор
КР2
управляется
сигналом
![]() таким
образом, что на втором и третьем
выходах БПФ
формируются
напряжения, пропорциональные синусу
я
косинусу
угла
таким
образом, что на втором и третьем
выходах БПФ
формируются
напряжения, пропорциональные синусу
я
косинусу
угла![]() т.
е.
т.
е.
![]()
Сигналы
со второго и третьего выходов БПФ
поступают
соответственно на измерительный
и опорный входы АЦП2
отношения
напряжений в код (БИС типа
К572ПВ1), на цифровом выходе которого
формируется код, пропорциональный
тангенсу угла![]() т.
е.
т.
е.![]() Напряжения
со вторых выходов БП31
и
БП32
поступают
на измерительные входы соответственно
АЦП1
и
АЦПЗ
отношения
напряжений в код. На опорные входы этих
АЦП
подается
нормированное
напряжение питания
Напряжения
со вторых выходов БП31
и
БП32
поступают
на измерительные входы соответственно
АЦП1
и
АЦПЗ
отношения
напряжений в код. На опорные входы этих
АЦП
подается
нормированное
напряжение питания
![]() СКДУ.
На
цифровых выходах АЦП1
и АЦПЗ
формируются
коды, пропорциональные модулям синуса
и косинуса угла
9, т. е.
СКДУ.
На
цифровых выходах АЦП1
и АЦПЗ
формируются
коды, пропорциональные модулям синуса
и косинуса угла
9, т. е.![]()
Сигналы с первых выходов БП31 и БП32 и с первого выхода БПФ поступают соответственно на первый, второй и третий входы логического блока ЛБ, состоящего из двух элементов 2 и 3 ИСКЛЮЧАЮЩЕЕ ИЛИ (ИМС типа К564ЛП2). На первом и втором выходах ЛБ формируются логические сигналы, соответствующие значениям второго и третьего разрядов кода угла 6, т. е.
![]()
Код с выхода АЦП2 поступает на вход ПЗУ (БИС типа К505РЕЗ 0054—0056), в котором записаны табличные значения функции арктангенса в диапазоне 0—1 при изменения входного кода от нуля до максимального значения. На выходе ПЗУ формируется код
![]()
т. е. код угла р. Код с выхода ПЗУ поступает на первый вход блока 1 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ. На его второй вход поступает сигнал со второго выхода ЛБ. На выходе блока 1 формируются младшие разряды кода угла в
![]()
Тактовые входы АЦП1 — АЦПЗ подключены к выходу U1 генератора импульсов G. Установочные входы АЦП и регистров RG (ИМС типа К564ИР9) соединены с циклическим выходом АЦП2.
Цифровые выходы АЦП1 и АЦПЗ подключены к первым информационным входам регистров RG1 и RG3, вторые информационные входы которых подключены к первым выходам соответственно БП31 и БПЗЗ. Первый, второй, третий и четвертый информационные входы регистра RG2 подключены соответственно к первому выходу БП31, к первому и второму выходам ЛБ и к выходу блока 1 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ.
Преобразователь работает следующим образом.
Выходные сигналы СКДУ сравниваются на компараторах К1 и К2 с нулевым уровнем напряжения, в результате чего на первых выходах БП31 и БП32 формируются логические сигналы, соответствующие знакам синусного и косинусного напряжений (18.1). Нулевое значение этих сигналов определяет пряную, а единичное — инверсную передачу напряжений коммутаторами КР1 к КРЗ н усилителями У1 и У2 на вторые выходы БП31 и БП32, т. е. значения напряжений на этих выходах равны модулям синусного и косинусного напряжений (1S.2).
Эти напряжения сравниваются на компараторе К2. В результате на первом выходе БПФ формируется логический сигнал, принимающий нулевое значение в 1, 4, 5-м и 3-й октантах н единичное значение во 2, 3, 6-м и 7-м октантах согласно (18.3). При нулевом значении этого сигнала коммутатор КР2 обеспечивает прохождение на второй и третий выходы блока соответственно модулей синусного и косинусного напряжений, а при единичном значении, наоборот, — модулей косинусного я синусного напряжений. Тем самый на втором и третьем выходах БПФ формируются синусное и косинусное напряжения, приведенные в первый октант (18.4).
Логический снгнал на первом выходе БП31 совпадает со значением старшего разряда кода угла 9. Второй и третий разряды кода угла 0 формируются элементами 1 и 2 ИСКЛЮЧАЮЩЕЕ ИЛИ логического блока ЛБ в соответствии с (18.5).
Аналого-цифровые
преобразователи, управляемые по тактовым
входам генератором импульсов, представляют
собой циклические АЦП
отношения
напряжений
в код поразрядного уравновешивания.
Параллельный циклический режим
работы этих АЦП
задается
подачей сигнала с циклического выхода
АЦП2
(ведущего)
на установочные входы АЦП1
и
АЦПЗ
(ведомых).
По окончании
цикла преобразования АЦП2
на его
циклическом выходе формируется единичный
логический уровень. По отрицательному
фронту следующего тактового
импульса все АЦП
устанавливаются
в исходное состояние, а на циклическом
выходе АЦП2
формируется
нулевой логический уровень. Далее за
m
разрядных
тактов происходит процесс поразрядных
уравновешиваний в АЦП.
В
результате на цифровых выходах АЦП1
и
АЦПЗ
формируются
коды, пропорциональные
модулям синуса и косинуса угла в, а на
цифровом выходе АЦП2
—
код, пропорциональный тангенсу угла![]()
Блок
ПЗУ
совместно
с блоком 3
элементов
ИСКЛЮЧАЮЩЕЕ ИЛИ, управляемым
третьим разрядом кода угла 0, осуществляет
преобразование кода
тангенса угла
![]() в
младшие разряды
в
младшие разряды
![]() кода
угла 6 в соответствии с
(18.6) и (18.7). При этом на выход этого блока
в нечетных октантах (Зр—0)
проходит прямой код угла
кода
угла 6 в соответствии с
(18.6) и (18.7). При этом на выход этого блока
в нечетных октантах (Зр—0)
проходит прямой код угла
![]() а
в четных октантах (3р=1)—инверсный
код, дополняющий угол
а
в четных октантах (3р=1)—инверсный
код, дополняющий угол
![]() до
до
![]() т.
е. код угла
т.
е. код угла
![]() Код
угла с
выхода блока 1
элементов
ИСКЛЮЧАЮЩЕЕ ИЛИ совместно с кодом
октантов
дает код угла в. Время этого преобразования,
равное сумме времен срабатывания
ПЗУ/к
блока
3,
не
превышает длительности (м+2)-го.
такта
АЦП2.
В
конце (щ+2)-го такта преобразования по
положительному перепаду сигнала
с циклического выхода АЦП2
коды
модулей и знаки функции синуса и косинуса
угла 0 и код угла в записываются в
соответствующие регистры. Таким
образом, на выходах регистров RG
имеются
коды синуса и косинуса угла
0 и код угла соответственно
Код
угла с
выхода блока 1
элементов
ИСКЛЮЧАЮЩЕЕ ИЛИ совместно с кодом
октантов
дает код угла в. Время этого преобразования,
равное сумме времен срабатывания
ПЗУ/к
блока
3,
не
превышает длительности (м+2)-го.
такта
АЦП2.
В
конце (щ+2)-го такта преобразования по
положительному перепаду сигнала
с циклического выхода АЦП2
коды
модулей и знаки функции синуса и косинуса
угла 0 и код угла в записываются в
соответствующие регистры. Таким
образом, на выходах регистров RG
имеются
коды синуса и косинуса угла
0 и код угла соответственно![]() (цифровые
эквиваленты
(цифровые
эквиваленты![]()
![]()
Повышение
быстродействия предлагаемого
преобразователя достигается за
счет параллельного преобразования
сигналов СКДУ
в
коды угла и его проекций
за время
![]() равное
циклу АЦП2,
Типовое
значение 12-разрядного АЦП,
построенного, например, на основе БИС
типа К572ПВ1, равно 110
мкс [38]. Таким образом, быстродействие
такого преобразователя в 3 раза выше,
чем преобразователя с разделением во
времени (рис. 18.1), и более чем на
порядок выше, чем быстродействие ФЦПУ
с цифровым осциллятором
(рис.
16.1).
равное
циклу АЦП2,
Типовое
значение 12-разрядного АЦП,
построенного, например, на основе БИС
типа К572ПВ1, равно 110
мкс [38]. Таким образом, быстродействие
такого преобразователя в 3 раза выше,
чем преобразователя с разделением во
времени (рис. 18.1), и более чем на
порядок выше, чем быстродействие ФЦПУ
с цифровым осциллятором
(рис.
16.1).
Существенное повышение быстродействия ФЦПУ позволяет использовать его в однокаиальной системе с высокой скоростью изменения -угла или в многоканальных системах с ограниченной скоростью изменения входных воздействий в его отдельных каналах.