

6.1. Общие сведения
Согласно классификации преобразователей фаза — код, приведенной в гл. 5 (табл. 5.1), вторым способом прн построении ПФК, нашедшим не менее широкое применение в измерительной технике, чем способ прямого измерения фазы, является использование компенсационного метода (или, иначе, метода следящего уравновешивания) [5, 3, 11, 13, 17, 22, 23, 35, 42]. Метод основан на сравнении измеряемого и эталонного сдвигов фаз в замкнутой фазовой системе. При этом полученный со специального компенсационного ФВ эталонный сдвиг фаз изменяется до устранения рассогласования между ним и измеряемым сдвигом фаз. Таким образом, на выходе компенсационного ФВ имеем сигнал, пропорциональный измеряемой фазе.
По принципу преобразования фазы, а точнее, в зависимости от вида применяемого в схеме преобразователя фаза — код компенсационного ФВ, различают ПФК, построенные на основе электромеханических и цифровых фазовых следящих систем (ФСС).
Преобразователи компенсационного типа обладают, как уже указывалось, высокой точностью и помехоустойчивостью за счет уменьшения погрешности от влияния внутренних и внешних шумов, а также погрешности дискретности. К недостаткам ПФК указанного тнпа следует отнести сложность практической реализации и настройки.
Рассмотрим более подробно основные структуры построения ПФК компенсационного тнпа.
6.2. Пфк с электромеханическими фсс
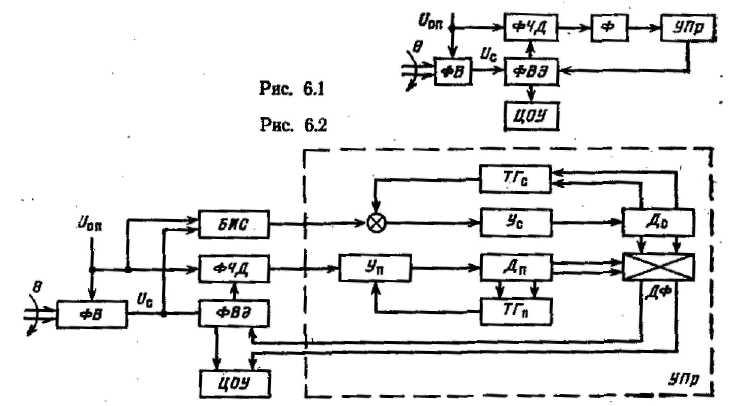
Упрощенная структурная схема компенсационного ПФК такого типа представлена на рис. 6.1 [36].
Опорное
напряжение
![]() поступает
непосредственно или после предвари-
поступает
непосредственно или после предвари-
тельного
усиления на вход фазочувствительного
детектора ФЧД,
На
второй вход
ФЧД
через
компенсационный (эталонный)
электромеханический фазовращатель
ФВЭ
поступает
сигнал с выхода первичного преобразователя
ФВ.
В
качестве
эталонного фазовращателя ФВЭ
может
нспользоваться СКВТ или сельсин.
Детектор ФЧД
выполняет
роль сравнивающего устройства, выходное
напряжение
которого пропорционально значению и
знаку рассогласования сдвига фаз
![]() Сигнал
с выхода ФЧД
через
фильтр Ф, сглаживающий пуль-
Сигнал
с выхода ФЧД
через
фильтр Ф, сглаживающий пуль-
сации
и возможные флуктуации (в случае наличия
помех во входных цепях), подается
на устройство привода УПр,
которое
изменяет угол поворота электромеханического
фазовращателя ФВЭ
так,
чтобы свести разность фаз сигналов
![]() (сигнал
рассогласования) на входе ФЧД
к
нулю. В момент достижения баланса
постоянная составляющая выходного
напряжения ФЧД
становится
равной нулю и отработка сигнала
рассогласования прекращается. При этом
присоединенное к валу ФВЭ
цифровое
отсчетное устройство ЦОУ
выдает
значение,
цифрового кода, пропорциональное
измеряемой разности фаз
(сигнал
рассогласования) на входе ФЧД
к
нулю. В момент достижения баланса
постоянная составляющая выходного
напряжения ФЧД
становится
равной нулю и отработка сигнала
рассогласования прекращается. При этом
присоединенное к валу ФВЭ
цифровое
отсчетное устройство ЦОУ
выдает
значение,
цифрового кода, пропорциональное
измеряемой разности фаз![]() и
и![]()
Существенным
недостатком рассмотренной схемы
является достаточно большая
динамическая погрешность, зависящая
во многом от добротности ФСС, которая
для достижения прецизионности ПФК
должна быть высокой. Поэтому для
повышения точности ПФК с электромеханической
ФСС используют принципы
комбинированного управления [17, 22] и в
частности способ построения
двухдвигательной
комбинированной ФСС с механическим
дифференциалом. Один из
вариантов построения такого ПФК приведен
на рис. 6.2 [22]. Структурная схема
компенсационного ПФК (рис. 6.2) отличается
от предыдущей тем, что в
ней не только осуществляется измерение
перемещения 9, но и определяется скорость
этого перемещения. Для этого в схему
вводится специальный блок измерения
скорости БИС,
выходной
сигнал которого, пропорциональный
скорости
перемещения в, подается на второй
исполнительный двигатель
![]() входящий
в устройство привода УПр.
Оба
двигателя системы — скоростной
входящий
в устройство привода УПр.
Оба
двигателя системы — скоростной![]() и
позиционный
и
позиционный
![]() —подключены
к механическому дифференциалуДФ,
который
суммирует углы поворота валов
двигателей
—подключены
к механическому дифференциалуДФ,
который
суммирует углы поворота валов
двигателей![]() Таким
образом, позиционная система
отрабатывает не полное перемещение 9,
а только ошибку, накапливающуюся
в результате погрешностей работы БИС
и
скоростной системы.
Следовательно, общая динамическая
погрешность измерения фазы в схеме
такого
ПФК существенно уменьшается.
Усилители
Таким
образом, позиционная система
отрабатывает не полное перемещение 9,
а только ошибку, накапливающуюся
в результате погрешностей работы БИС
и
скоростной системы.
Следовательно, общая динамическая
погрешность измерения фазы в схеме
такого
ПФК существенно уменьшается.
Усилители![]() служат
для усиления соответственно сигналов
рассогласования и с выхода блока БИС.
Тахоге-нераторы
служат
для усиления соответственно сигналов
рассогласования и с выхода блока БИС.
Тахоге-нераторы![]() используются
в качестве стабилизирующих элементов
соответственно
позиционной и скоростной систем.
Измерение скорости перемещения 0 можно
производить различными способами.
используются
в качестве стабилизирующих элементов
соответственно
позиционной и скоростной систем.
Измерение скорости перемещения 0 можно
производить различными способами.
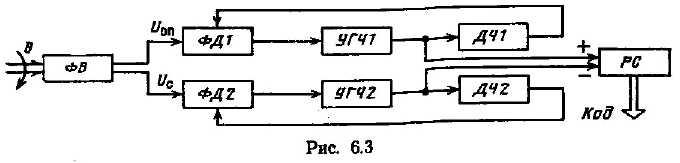
На рис. 6.3 представлена одна из схем для определения угловой скорости
вала с
помощью параметрического многополюсного
ФВ
[22].
В этой схеме опорное
![]() и сигнальное
и сигнальное![]() напряжения
с выхода ФВ
подаются
на фазовые детекторы
ФД1
и
ФД2,
на
вторые входы которых поступают напряжения
управляемых
генераторов частоты УГЧ1
и
УГЧ2
через
соответствующие делатели частоты
ДЧ1
и
ДЧ2.
При
этом пропорциональность частот УГЧ
опорного
я сигнального
каналов схемы достигается за счет
управления генераторами УГЧ
методом
автоподстройки частоты. Реверсивный
счетчик PC
регистрирует
число импульсов
за время
напряжения
с выхода ФВ
подаются
на фазовые детекторы
ФД1
и
ФД2,
на
вторые входы которых поступают напряжения
управляемых
генераторов частоты УГЧ1
и
УГЧ2
через
соответствующие делатели частоты
ДЧ1
и
ДЧ2.
При
этом пропорциональность частот УГЧ
опорного
я сигнального
каналов схемы достигается за счет
управления генераторами УГЧ
методом
автоподстройки частоты. Реверсивный
счетчик PC
регистрирует
число импульсов
за время![]() определяемое
частотой сигналов
определяемое
частотой сигналов![]() как
разность ча-
как
разность ча-
стот УГЧ сигнального и опорного каналов. При этом угловая скорость перемещения 6 определяется из выражений
![]()
где
![]() —число
импульсов вPC;
—число
импульсов вPC;
![]() —коэффициент
деления частоты; z
— коэффициент
преобразования масштаба ФВ.
—коэффициент
деления частоты; z
— коэффициент
преобразования масштаба ФВ.
Естественно, что измерение скорости перемещения также вносит ошибки в общую погрешность ПФК компенсационного типа. При этом точность измерения скорости блоком БИС будет определяться, очевидно, в первую очередь погрешностью фазовых детекторов ФД (линейностью, чувствительностью, стабильностью работы) и диапазоном регулируемых частот УГЧ. Сюда же следует отнести и наличие погрешности самого фазовращателя.
В целом точность ПФК компенсационного типа с электромеханическими ФСС определяется в основном статическими погрешностями компенсационного фазовращателя ФВЭ, фазочувствительного детектора ФЧД и блока измерения скорости БИС. К недостаткам ПФК такого типа следует отнести невысокое быстродействие за счет инерционности привода УПр и фазовращателя ФВЭ, а также сложность и громоздкость схемы [11, 17, 22, 36].
Перспективным направлением в плане повышения точности и быстродействия ПФК компенсационного типа является замена механических инерционных узлов их электронными аналогами, т. е. использование в ПФК цифровых фазовых следящих систем.