

7.2. Многоотсчетные пфк
7,2.1. Общие сведения
Все рассмотренные в этой главе, а также в гл. 5 и 6 схемы преобразователей перемещение — фаза — код относятся к одноотсчетным многоразрядным ПФК. Такие преобразователи осуществляют преобразование, например, углового перемещения вала какого-либо вращающегося объекта в пределах одного оборота вала, т. е. в диапазоне 0—360°. Для дальнейшего увеличен диапазона измерения необходимо введение грубого отсчета (ГО), позволяющего отсчиты-вать число оборотов (или шагов) преобразователя точного отсчета (ТО). Таким образом, построение многоотсчетных преобразователей предполагает наличие каналов грубого и точного отсчетов. Существует два основных метода построения многоотсчетных ПФК: метод с использованием специального датчика ГО и метод формирования ГО по показаниям точного отсчета специальный устройством без применения датчика ГО,
Применение первого метода предусматривает наличие специальной схемы согласования отсчетов (ССО), необходимой потому, что коэффициент редукции ГО, осуществляющий масштабное преобразование угла в реальных преобразователях, не является постоянной величиной. Его непостоянство вызвано наличием как систематических, так и случайных погрешностей преобразования в канале ГО. Кроме того, измерение кода ГО происходит с погрешностями, значительно превышающими ТО [1, 11, 17, 22, 23, 39].
При использовании второго метода в согласовании отсчетов нет необходимости, так как в схемах преобразователей этого типа в момент перехода через максимальное значение ТО формируется импульс, который поступает на вход реверсивного счетчика ГО. В результате получаем ГО накапливающего типа. Отсюда следует, что преобразователи, использующие второй метод согласования отсчетов, обладают недостатками, присущими ПФК накапливающего типа. Вы-бор того или иного метода построения многоотсчетных преобразователей зависит от условий работы, метрологических требований и т. д. Рассмотрим более подробно различные варианты построения многоотсчетных ПФК. реализующих оба метода.
7.2.2. Пфк с использованием датчиков грубого отсчета
У прощенная
схема двухотсчетногоПФК
представлена на рис. 7.6 [22]. Схема
состоит из первичного преобразователя
измеряемых перемещений ПП
и
отсчетной
части 0Ч.
преобразователь
перемещений включает в себя фазовращатель
точного отсчета
прощенная
схема двухотсчетногоПФК
представлена на рис. 7.6 [22]. Схема
состоит из первичного преобразователя
измеряемых перемещений ПП
и
отсчетной
части 0Ч.
преобразователь
перемещений включает в себя фазовращатель
точного отсчета![]() и
датчик грубого отсчета
и
датчик грубого отсчета![]() При
этом и
При
этом и![]() и
и![]() располагаются,
например, непосредственно на намеряемом
валу, преобразуя
угол поворота в "электрические
сигналы, параметры которых зависят от
этого
угла. При этом
располагаются,
например, непосредственно на намеряемом
валу, преобразуя
угол поворота в "электрические
сигналы, параметры которых зависят от
этого
угла. При этом
![]() многократно
за оборот вала повторяет фазу сигнала.Число
циклов изменения фазы равно коэффициенту
преобразования масштаба
многократно
за оборот вала повторяет фазу сигнала.Число
циклов изменения фазы равно коэффициенту
преобразования масштаба
![]() поэтому
часто
поэтому
часто
![]() называют
преобразователем масштаба угла ПМУ.
Наличие
коэффициента
называют
преобразователем масштаба угла ПМУ.
Наличие
коэффициента
![]() вносит
неоднозначность отсчета и, как правило,
представляет
собой ПМУ с коэффициентом
вносит
неоднозначность отсчета и, как правило,
представляет
собой ПМУ с коэффициентом![]() [11,
17, 22].
[11,
17, 22].
Отсчетная часть преобразователя имеет соответственно два канала: канал ТО (КГО) и канал ГО (КГО), которые могут в общем случае быть построены с использованием любых методов преобразования, рассмотренных выше. Однако при использовании этих методов необходимо в схему вводить согласование отсчетов ГО и ТО (на рис. 7.6 блок ССО) для устранения возможной погрешности, определяемой младшим разрядом ГО, поскольку дискретность канала ГО всегда соответствует единице старшего разряда канала точного отсчета. Следует также отметить, что многоотсчетные преобразователи, как правило, имеют два отсчета и только в некоторых случаях используются три и большее число отсчетов системы преобразования перемещений.
Рассмотрим принципы построения многоотсчетных ПФК с использованием датчиков ГО, например циклический преобразователь с электромашинным ФВ [53], состоящей из двухотсчетного электромашинного фазовращателя (ЭМФВ) в электронного блока.
В качестве ЭМФВ используются бескорпусные двухотсчетные вращающиеся трансформаторы типа BT-7I или ВТ-100 с коэффициентом электрической редук-цви канала точного отсчета 16 и 323 соответственно.
Электронный блок преобразователя содержит двухфазный генератор ДФГ (рис. 7.7), питающий ЭМФВ, преобразователи фаза —код точного ПФК ТО и грубого ПФК ГО отсчетов, блок совмещения отсчетов БСО и блок контроля БК, на выходе которого выдается сигнал Исправен в виде потенциала +5 В при исправности линий связи ЭМФВ с электронным блоком, а также при исправности ДФГ и аналого-цифровых устройств электронного блока. Электронный блок имеет две модификации — для использования совместно с ВТ-71 или ВТ-100.
Синусоидальный выходной
сигнал ДФГ формируется
путем деления частоты кварцевого
генератора (15 МГц) и последующей
фильтрации полученного напряжения
(частотой 3660 Гц), причем для снижения
порядка фильтра и, следовательно,
повышения стабильности его характеристик
предварительно формируется ступенчатый
синусоидальный сигнал, в котором
отсутствуют высшие гармоники до
шестой включительно. Фазовый сдвиг
между выходными сигналами, равный
![]() и
равенство амплитуд сигналов с погрешностью
и
равенство амплитуд сигналов с погрешностью
![]() обеспечивает
обеспечивает
прецизионный фазовращатель. Коэффициент гармоник выходных сигналов ДФГ не превышает 0,1.%.
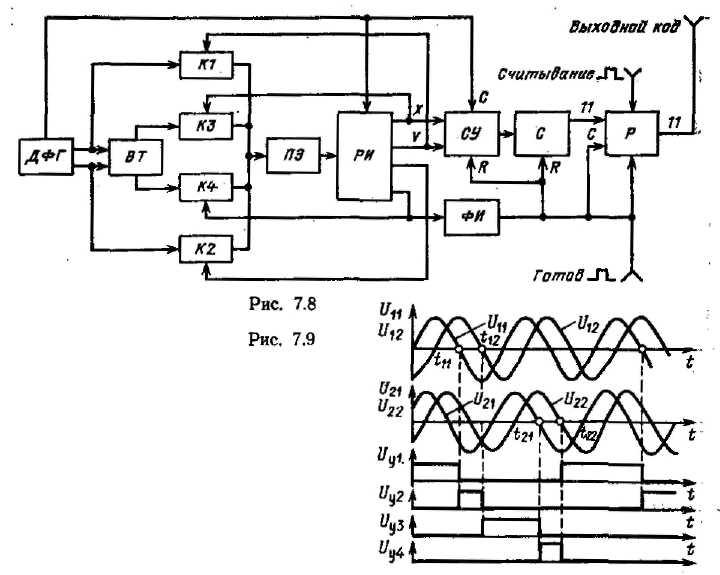 Упрощенная
функциональная схема канала ТО приведена
на рис. 7.8. Преобразователь
ПФК
ТО выполнен
по схеме прямого измерения фазы с одним
пороговым
элементом ПЭ,
на
вход которого поочередно с помощью
ключей К1—К4
подаются
синусоидальные сигналы со входов
Упрощенная
функциональная схема канала ТО приведена
на рис. 7.8. Преобразователь
ПФК
ТО выполнен
по схеме прямого измерения фазы с одним
пороговым
элементом ПЭ,
на
вход которого поочередно с помощью
ключей К1—К4
подаются
синусоидальные сигналы со входов
![]() на
рис. 7.9)
на
рис. 7.9)
выходов![]() вращающегося
трансформатора точного отсчета. В такой
схеме
исключаются погрешности разброса
порогов срабатывания в задержек
переключения,
неизбежных при использовании
нескольких ПЭ.
вращающегося
трансформатора точного отсчета. В такой
схеме
исключаются погрешности разброса
порогов срабатывания в задержек
переключения,
неизбежных при использовании
нескольких ПЭ.
Пороговый
элемент вырабатывает короткий
импульс при переходе синусоидального
сигнала на его входе из положительного
значения в отрицательное
через нулевое значение. По фронту этого
импульса переключается распределитель
импульсов РИ,
управляющий
ключами К1—К.4.
На
выходах РИ
формируется
последовательность импульсов управления![]() После
срабатывания ПЭ
его вход блокируется
на время переходных процессов, вызванных
переключением
К.1—К4.
После
срабатывания ПЭ
его вход блокируется
на время переходных процессов, вызванных
переключением
К.1—К4.
Сигнал![]() поступает
на вход запрета
поступает
на вход запрета![]() управляемого
счетчикаСУ.
При-отсутствии
этого сигнала
управляемого
счетчикаСУ.
При-отсутствии
этого сигнала
![]() СУ
переключается
по каждому импульсу, напряжения
СУ
переключается
по каждому импульсу, напряжения![]() частотой
15 МГц, поступающему из ДФГ.
Модуль
счета СУ
при
наличии сигнала
частотой
15 МГц, поступающему из ДФГ.
Модуль
счета СУ
при
наличии сигнала![]() на
входе
на
входе![]() а
при
а
при![]() Таким
образом , в
интервалы времени
Таким
образом , в
интервалы времени
![]() (см.
рис. 7.9) на вход счетчика С поступают
импульсы с частотой 3,75 МГц, а в
интервал времени
(см.
рис. 7.9) на вход счетчика С поступают
импульсы с частотой 3,75 МГц, а в
интервал времени
![]() —с
частотой 7,5 МГц. Фронты выходных сигналов
РИ
синхронизированы
импульсами
высокой частоты. Это исключает возможность
пропуска хотя бы одного
импульса СУ
при
переключении ключей К1—К4.
По
окончании цикла измерений
срезом сигнала
—с
частотой 7,5 МГц. Фронты выходных сигналов
РИ
синхронизированы
импульсами
высокой частоты. Это исключает возможность
пропуска хотя бы одного
импульса СУ
при
переключении ключей К1—К4.
По
окончании цикла измерений
срезом сигнала
![]() (в
момент
(в
момент
![]() запускается
формирователь импульсов
ФИ,
который
после небольшой задержка вырабатывает
импульс Готов
длительностью 4—8
мкс. По фронту этого импульса происходит
запись кода счетчика
С в регистр Р,
а
по спаду — установка счетчиков С и СУ
в исходное-состояние.
запускается
формирователь импульсов
ФИ,
который
после небольшой задержка вырабатывает
импульс Готов
длительностью 4—8
мкс. По фронту этого импульса происходит
запись кода счетчика
С в регистр Р,
а
по спаду — установка счетчиков С и СУ
в исходное-состояние.
Выходной код регистра Р выдается при подаче внешнего сигнала Считывание. При отсутствии сигнала Считывание на выходе поддерживается «третье состояние», что позволяет по одной многоразрядной цифровой линии связи передавать информацию от нескольких преобразователей угол — код. На время-действия сигнала Считывание осуществляется блокировка записи кода в регистр Р. Это дает возможность подавать импульс Считывание в любой момент времени, не нарушая нормальной работы преобразователя. На вход Считывание можно подать сигнал Готов, при этом выходная информация будет считываться с минимальной динамической погрешностью.
В соответствии с изложенным алгоритмом работы код, формируемый на выходе ПФК ТО, пропорционален интервалу времени
![]()
Здесь![]() —
фазовый сдвиг между первым выходным и
первым входным напряжениями
ВТ;
—
фазовый сдвиг между первым выходным и
первым входным напряжениями
ВТ;![]() —
фазовый сдвиг между вторым выходным и
вторым входным напряжениями
ВТ.
При
этом
—
фазовый сдвиг между вторым выходным и
вторым входным напряжениями
ВТ.
При
этом
![]() где
8 — угол поворота ротора ВТ;
где
8 — угол поворота ротора ВТ;
![]() —
частота питающего напряжения.
—
частота питающего напряжения.
При
таком преобразовании компенсируются
составляющие погрешности, обусловленные
второй пространственной гармоникой
индукция ВТ
и
погрешностями ДФГ
[53],
что наряду со снижением общей погрешности
преобразователя позволяет
существенно упростить схему ДФГ.
Так,
для используемого ДФГ
при
козффициенте
редукции ТО![]() амплитуды
составляющих погрешности преобразователя,
вызванные фазовой
амплитуды
составляющих погрешности преобразователя,
вызванные фазовой![]() и
амплитудной
и
амплитудной![]() погрешностямиДФГ,
со-ставят
соответственно
погрешностямиДФГ,
со-ставят
соответственно
![]()
Параллельное
преобразование интервалов времени![]() в
код обеспечивает
высокое быстродействие устройства.
Цикл измерения угла не превышает двух
периодов питающего напряжения ВТ.
в
код обеспечивает
высокое быстродействие устройства.
Цикл измерения угла не превышает двух
периодов питающего напряжения ВТ.
Алгоритм
работы ПФК
ГО аналогичен
рассмотренному для ПФК
ТО. Отличне
состоят в последовательном преобразовании
интервалов![]() в
коды. Это позволило
упростить схему ПФК
ГО, не
снижая быстродействия устройства,
определяемого
быстродействием ПФК
ТО. Зона
совмещения отсчетов примененной
схемы БСО для ВТ-71 составляет
в
коды. Это позволило
упростить схему ПФК
ГО, не
снижая быстродействия устройства,
определяемого
быстродействием ПФК
ТО. Зона
совмещения отсчетов примененной
схемы БСО для ВТ-71 составляет![]() что
обеспечивает надежное согласование
точного и грубого отсчетов. Для совмещения
отсчетов используются три
что
обеспечивает надежное согласование
точного и грубого отсчетов. Для совмещения
отсчетов используются три

дополнительных разряда выходного кода ПФК ГО.
Особый интерес представляет устройство согласования отсчетов рассматриваемого преобразователя, функциональная схема которого представлена на рис. 7.10 [а. с. 1088047 (ССРР)]. Устройство работает следующим образом.
На выходе двоичного сумматора SM образуется следующая сумма:
![]()
где S
— код значащих разрядов двоичного
сумматора;
![]() —выходной
код дополнительных
разрядов двоичного сумматора;
Т
—
инверсный код разрядов точного
—выходной
код дополнительных
разрядов двоичного сумматора;
Т
—
инверсный код разрядов точного
отсчета
(соответственно Т—прямой код), который
используется для согласования;
Е — единица с весом старшего разряда
точного отсчета; Г — код значащи»
разрядов
грубого отсчета; г
—
ход дополнительных разрядов грубого
отсчета, за исключением
младшего разряда; b—младший
дополнительный разряд грубого, отсчета.
Используя правила двоичной математики,
можно следующим образом выразить
инверсный код через прямой:
![]() где
где
![]() —единица
с весом,равным
удвоенному весу старшего разряда ГО
или, что то же самое, с весом младшего
значащего разряда грубого отсчета; е
— единица с весом,
равным весу младшего
—единица
с весом,равным
удвоенному весу старшего разряда ГО
или, что то же самое, с весом младшего
значащего разряда грубого отсчета; е
— единица с весом,
равным весу младшего![]() согласующего
разряда точного отсчета. Следовательно,
согласующего
разряда точного отсчета. Следовательно,![]()
Выделяя код дополнительных разрядов двоичного сумматора с учетом сигнала переноса в младший значащий разряд, получаем
![]()
где![]() —
код дополнительных разрядов двоичного
сумматора с учетом сигналапереноса
в младший значащий разряд. Отсюда
следует, что зона согласования отсчетов
—это значение (г—1), при котором не
будет происходить изменений в
значащих разрядах выходного кода
двоичного сумматора за счет изменения»
значения г,
т.
е. это значение (г—Г), при котором
выполняется условие
—
код дополнительных разрядов двоичного
сумматора с учетом сигналапереноса
в младший значащий разряд. Отсюда
следует, что зона согласования отсчетов
—это значение (г—1), при котором не
будет происходить изменений в
значащих разрядах выходного кода
двоичного сумматора за счет изменения»
значения г,
т.
е. это значение (г—Г), при котором
выполняется условие![]()
![]() Следовательно,
учитывая, что
Следовательно,
учитывая, что![]() можно
записать
можно
записать
![]()
Отсюда видно, что соединение младшего дополнительного разряда грубого отсчета с входом переноса двоичного сумматора не увеличивает зону согласования отсчета, а лишь симметрирует ee.
Так,
без этого разряда при соединении входа
переноса двоичного сумматора
с шиной логического нуля получили бы![]()
Учитывая, что вес младшего дополнительного разряда грубого отсчета, в 2 раза меньше веса младшего согласующего разряда точного отсчета, можно записать: при b=0 2b=0; при b=1 2b=2.
Таким
образом, при b=1,
т. е. при изменении выходного кода
грубого отсчета
на![]() выходной
код двоичного сумматора увеличится на
единицу младшего-дополнительного
разряда, Следовательно, зона согласования
отсчетов определяется
следующим образом:
выходной
код двоичного сумматора увеличится на
единицу младшего-дополнительного
разряда, Следовательно, зона согласования
отсчетов определяется
следующим образом:
или,
окончательно,![]()
Таким
образом, зона согласования отсчетов
стала полностью симметричной.
Величина![]() зоны
согласования отсчетов, равная разности
границ этой зоны.определяется
как
зоны
согласования отсчетов, равная разности
границ этой зоны.определяется
как![]()
Следовательно, для такого преобразователя величина зоны согласования отсчетов равна единице младшего значащего разряда грубого отсчета без единицы младшего согласующего разряда.
Так,
например, при двух согласующих разрядах![]()
Принцип
работы БК
основан
на измерении отклонения фазового сдвига
между
выходными напряжениями ВТ
в
каналах ГО
и
ТО
от![]() При
идеальных
При
идеальных
ВТ
и
ДФГ![]() Погрешности
ДФГ,
обрыв
линий связи ЭМФВ
Погрешности
ДФГ,
обрыв
линий связи ЭМФВ
с
электронным блоком, неисправности
К1—К4,
ПЭ и
РИ
приведут
к нарушению этого
равенства. Выход величины отклонения![]() из
заданного
из
заданного
допуска,
определяемого предельно допустимой
погрешностью преобразования![]() вызванной
погрешностями ДФГ,
индицируется
сигналом Исправен.
Погрешности
вызванной
погрешностями ДФГ,
индицируется
сигналом Исправен.
Погрешности
![]() ДФГ
вызовут
максимальное суммарное отклонение
ДФГ
вызовут
максимальное суммарное отклонение![]() Задавая
предельно допустимые составляющие
погрешности преобразования
Задавая
предельно допустимые составляющие
погрешности преобразования
![]() можно
найти величинупревышение
кото-
можно
найти величинупревышение
кото-
рой
следует индуцировать:![]()
где![]()
![]()
Например,
при коэффициенте редукции ТО
![]() для
обнаружения по-
для
обнаружения по-
грешности![]() вызванной
погрешностями ДФГ, контролируют превыше-
вызванной
погрешностями ДФГ, контролируют превыше-
ние отклонения
![]() величины
величины
![]() _ что
технически реа-
_ что
технически реа-
лизуется достаточно просто.
Помимо выявленных выше недостатков, присущих циклическим фазовым преобразователям, рассмотренный двухотсчетный вариант ЦПУ весьма сложен. Он реализован на ИМС малой и средней степеней интеграции и поэтому уступает амплитудному циклическому ЦПУ [54], который за счет более рационального построения и использования ИМС с повышенной степенью интеграции имеет в 1,6 раза меньше объем отсчетной части при сопоставимом быстродействии.
Технические
характеристики преобразователя:
разрядность выходного кода 15
для ВТ-71 и 16 для ВТ-100; статическая
погрешность смены кода![]() для
для
ВТ-71
и![]() для
ВТ-100; частота обновления выходной
информации 1830 Гц;
для
ВТ-100; частота обновления выходной
информации 1830 Гц;
напряжения
источников питания![]() В;
потребляемая мощность
В;
потребляемая мощность
2,5 Вт;
диапазон рабочих температур — от —60
до 70 °С; габаритные размеры электронного
блока![]() мм
[53].
мм
[53].
Несмотря на возможности обеспечения комплектной поставки в рассмотренном варианте ЦПУ не приняты меры по компенсации погрешности датчика электронной отсчетной частью. Следует отметить, что этот недостаток присущ большинству известных двухотсчетных ЦПУ [3, 81], что ограничивает их точность погрешностью точного канала первичного преобразователя.
Поэтому особый интерес представляют схемы, предусматривающие повышение точностных показателей и помехозащищенность ЦПУ за счет совершенствования микроэлектронной отсчетной части.