

8.3. Многофункциональные фазовые преобразователи
Дальнейшее совершенствование преобразователей угла и скорости предусматривает повышение точности путем автоматизации стабильного выбора диапазона измерения частоты вращения и введения канала измерения ускорения.
Один из вариантов построения преобразователя углового положения, скорости и ускорения вала приведен на рис. 8.5 [а. с 994990 (СССР)]. Преобразователь работает следующим образом.
Первый счетчик С1 выполняет функцию делителя ГИ. Формирователь импульсов ФИ вырабатывает из выходных периодических сигналов счетчика С1
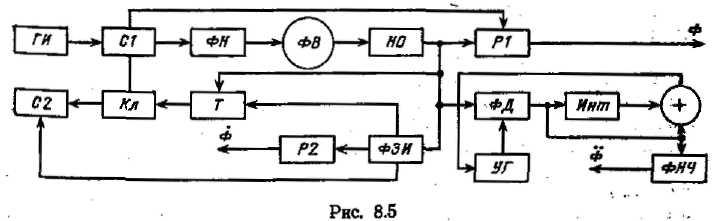
опорные напряжения фазовращателя ФВ. Нуль-орган НО формирует из выходных синусоидальных сигналов ФВ прямоугольные периодические сигналы, по фронту которых осуществляется запись кода С1 в регистр Р1, т. е. фиксируется цифровой эквивалент Ф текущего углового положения вала в.
Второй счетчик С2,
имеющий разрядность,
равную разрядности С1,
плюс дополнительный
знаковый разряд, вместе с ключом Кл,
дополнительным
триггером
Т,
формирователем
задержанных импульсов ФЗИ
и
регистром Р2
образуют
блок вычисления частоты вращения,
причем вычисление кода скорости заменено
вычислением кода приращения
![]() периода
Т
выходного
сигнала фазовращателя
по отношению к периоду
периода
Т
выходного
сигнала фазовращателя
по отношению к периоду![]() опорного
сигналаФВ.
опорного
сигналаФВ.
По
фронту выходного сигнала нуль-органа
НО
переходит
в нулевое состояние
дополнительный триггер Т
и
одновременно запускается ФЗИ.
Сигнал
с выхода
триггера Т,
воздействуя
на управляющий вход ключа К.л,
прекращает
поступление
импульсов от ГИ
на
счетный вход С2.
Через
время, достаточное для
переноса в С2,
на
первом выходе ФЗИ
вырабатывается
импульс, который поступает
на вход разрешения записи регистра Р2
и
осуществляет запись кода ![]() счетчика
С2
в
этот регистр.
счетчика
С2
в
этот регистр.
Импульс
со второго выхода ФЗИ,
воздействуя
на входы предустановки C2,
осуществляет
запись в этот счетчик кода, соответствующего
промежутку времени между появлением
импульсов на первом и третьем выходах
формирователя
ФЗИ.
Импульс
с третьего выхода ФЗИ
переводит
в единичное состояние триггер
Т,
в результате
чего будет открыт ключ Кл
и
сигналы от ГИ
вновь
поступят
на вход С2.
Поскольку
коэффициенты пересчета счетчиков
равны, в конце
каждого периода выходного сигнала НО
в
регистре Р2
будет
фиксирован либо
прямой код
![]() если
если
![]() ,
либо дополнительный код
,
либо дополнительный код
![]() если
если![]()
Цепь
фазовой автоподстройки частоты,
содержащая фазовый детектор ФД,
интегратор![]() суммирующий
элемент и управляемый генератор УГ,
совместно
с
фильтром нижних частот ФНЧ
образуют
блок вычисления ускорения. На первый
вход ФД
поступают
сигналы с выхода HV.,
имеющие
частоту
суммирующий
элемент и управляемый генератор УГ,
совместно
с
фильтром нижних частот ФНЧ
образуют
блок вычисления ускорения. На первый
вход ФД
поступают
сигналы с выхода HV.,
имеющие
частоту![]() где
где
![]() —частота
вращения вала фазовращателя;
—частота
вращения вала фазовращателя;![]() —частота
опорного сигнала
фазовращателя.
—частота
опорного сигнала
фазовращателя.
Второй'
вход- ФД
соединен
с выходом генератора, частота которого
равна
![]() при
нулевом значении напряжения на
управляющем входе, фазовый детектор
ФД
преобразует
разность фаз сигналов на его входах в
пропорциональное этой разности
значение напряжения на его выходе.
Выходной сигнал ФД
после
интегрирования
в
при
нулевом значении напряжения на
управляющем входе, фазовый детектор
ФД
преобразует
разность фаз сигналов на его входах в
пропорциональное этой разности
значение напряжения на его выходе.
Выходной сигнал ФД
после
интегрирования
в
![]() воздействует
на управляющий вход УГ, удерживая
разность
фаз сигналов на входах ФД
на
уровне, близком к нулевому. Следовательно,
и частота генератора УГ
с
некоторым рассогласованием равна
выходной частоте
нуль-органа НО.
воздействует
на управляющий вход УГ, удерживая
разность
фаз сигналов на входах ФД
на
уровне, близком к нулевому. Следовательно,
и частота генератора УГ
с
некоторым рассогласованием равна
выходной частоте
нуль-органа НО.
Экспериментально выяснено, что дополнительная изодромная связь с выхода детектора ФД на вход генератора УГ уменьшает рассогласование частот и увеличивает устойчивость цепи фазовой автоподстройки.
Генератор
УГ
имеет
линейную зависимость выходной частоты
от управляющего
напряжения. При изменении частоты
вращения одновременно пропорционально
изменяются частота УГ а выходное
напряжение
![]() Следовательно,
входное
напряжение интегратора, равное
производной от выходного, равно с
некоторым
коэффициентом пропорциональности
значению углового ускорения. На
вход
Следовательно,
входное
напряжение интегратора, равное
производной от выходного, равно с
некоторым
коэффициентом пропорциональности
значению углового ускорения. На
вход
![]() поступают
сигналы с выходаФД,
в которых
кроме низкочастотной
составляющей, пропорциональной ускорению
вращения, присутствует высокочастотная
составляющая с частотой входного
сигнала. Фильтр нижних частот ФНЧ
выделяет
высокочастотную составляющую входного
сигнала
поступают
сигналы с выходаФД,
в которых
кроме низкочастотной
составляющей, пропорциональной ускорению
вращения, присутствует высокочастотная
составляющая с частотой входного
сигнала. Фильтр нижних частот ФНЧ
выделяет
высокочастотную составляющую входного
сигнала
![]() т.
е. на
его выходе образуется аналоговый
сигнал, пропорциональный ускорению
вращения.
Постоянная интегрирования выбирается
исходя как из диапазона измерения
ускорения вращения вала, так н из
требований к точности измерения.
т.
е. на
его выходе образуется аналоговый
сигнал, пропорциональный ускорению
вращения.
Постоянная интегрирования выбирается
исходя как из диапазона измерения
ускорения вращения вала, так н из
требований к точности измерения.
Недостатком
такого построения преобразователя
является значительная погрешность
измерения низких скоростей и ускорений,
обусловленная малым относительным
изменением частоты выходных сигналов
ФВ,
которое
равно алгебраической
сумме опорной частоты фазовращателя![]() и
частоты вращения вала
и
частоты вращения вала![]()
Погрешность
измерения низких скоростей в ускорений
может быть уменьшена
путем непосредственного использования
в каналах измерения скорости и ускорения
сигналов дополнительного фазовращателя
с большим коэффициентом электронной
редукций
![]() у
которого выходная частотаF
выражается
соотношением
у
которого выходная частотаF
выражается
соотношением
![]()
Однако использование в составе преобразователя двух ФВ существенно усложнит его конструкцию и увеличит стоимость. Это приводит к необходимости дальнейшего совершенствования отсчетной части преобразователя.
На рис. 8.6 представлена функциональная схема усовершенствованного варианта преобразователя углового положения, скорости и ускорения вращения вала в их цифровые эквиваленты соответственно Ф, Ф и Ф [а. с. 1101740 (СССР)]. Схема работает следующим образом.
Счетчик
С1
выполняет
функцию делителя частоты![]() на
коэффициент
на
коэффициент![]() так,
что на выходе старшего, п-го
разряда счетчика С1 образуются
прямоугольные
импульсы с частотой
так,
что на выходе старшего, п-го
разряда счетчика С1 образуются
прямоугольные
импульсы с частотой![]() ФормировательФИ
вырабатывает
из выходных периодических сигналов
С1
опорные
напряжения фазовращателя ФВ.
Нуль-орган
НО1
формирует
из выходных синусоидальных сигналов
ФВ
прямоугольные
периодические сигналы, по фронту которых
осуществляется запись кода С1
а
регистре
Р1,
где
фиксируется код текущего углового
положения вала.
ФормировательФИ
вырабатывает
из выходных периодических сигналов
С1
опорные
напряжения фазовращателя ФВ.
Нуль-орган
НО1
формирует
из выходных синусоидальных сигналов
ФВ
прямоугольные
периодические сигналы, по фронту которых
осуществляется запись кода С1
а
регистре
Р1,
где
фиксируется код текущего углового
положения вала.
Выходные
сигналы ГИ
поступают
также на первый вход схемы запрета СЗ,
на
управляющий вход которой поступают
сигналы с частотой![]() разряда
С1,
которые
запрещают прохождение через СЗ
каждого
импульса с номером
разряда
С1,
которые
запрещают прохождение через СЗ
каждого
импульса с номером![]() Среднее
значение частоты импульсов на выходе
схемы СЗ
равно
Среднее
значение частоты импульсов на выходе
схемы СЗ
равно![]() Де-
Де-

литель
частоты ДЧ
имеет
коэффициент деления, равный![]() где
где![]() —коэффицяент
умножения умножителя частоты УЧ,
так
что выходная частота
—коэффицяент
умножения умножителя частоты УЧ,
так
что выходная частота![]() делителяДТ
делителяДТ
![]()
Умножитель
УЧ
умножает
в![]() раз
выходную частотуФВ,
равную
сумме
раз
выходную частотуФВ,
равную
сумме
![]() так
что его выходная частота будет равна
так
что его выходная частота будет равна
![]()
На
выходе блоха вычитания БВЧ
образуется
частота
![]() равная
разностичастот
умножителя и делителя частоты:
равная
разностичастот
умножителя и делителя частоты:
![]()
При![]() выходная
частотаБВЧ
будет
равна
выходная
частотаБВЧ
будет
равна![]()
Выходной
сигнал БВЧ
аналогичен
выходному сигналу ФВ, имеющему
коэффициент
электрической редукции, равный![]() Второй
нуль-органИО2
формирует
из
выходных синусоидальных сигналов БВЧ
прямоугольные
импульсы, которые поступают
в каналы вычисления частоты вращения
и ускорения.
Второй
нуль-органИО2
формирует
из
выходных синусоидальных сигналов БВЧ
прямоугольные
импульсы, которые поступают
в каналы вычисления частоты вращения
и ускорения.
Счётчик
С2,
имеющий
разрядность, большую разрядности С1
на
дополнительный
знаковый разряд, вместе с ключом Кл,
дополнительным
триггером Т,
формирователем
задержанных импульсов ФЗИ
и
регистром Р2
образуют
канал вычисления
частоты вращения, причем вычисление
кода скорости заменено вычислением
кода приращения
![]() периодаТ
выходного
сигнала БВЧ
по
отношению
к периоду
периодаТ
выходного
сигнала БВЧ
по
отношению
к периоду![]() опорного
сигнала фазовращателя.
опорного
сигнала фазовращателя.
По
фронту выходного сигнала НО2
переходит
в нулевое состояние триггер Т
и
одновременно запускается ФЗИ.
Сигнал
с выхода триггера Т,
воздействуя
на
управляющий вход ключа Кл,
прекращает
поступление импульсов ГИ
на
счетный
вход С2.
Через
время, достаточное для переноса в этом
счетчике, на первом
выходе ФЗИ
вырабатывается
импульс, который поступает на вход
разрешения
записи Р2,
и
осуществляется в него запись кода![]() изС2.
изС2.
ИмПульс
со второго выхода ФЗИ,
воздействуя
на входы предустановки С2,
осуществляет
запись в него кода, соответствующего
промежутку времени между появлением
импульсов на первом и третьем выходах
ФЗИ.
Импульс
с третьего выхода
ФЗИ
переводит
в единичное состояние триггер Т,
в
результате чего открывается
ключ Кл
и
сигналы ГИ
вновь
поступают на вход С2.
Поскольку
коэффициенты
пересчета С/ и С2
равны,
в конце каждого периода выходного
сигнала
НО2
в
регистре Р2
будет
зафиксирован либо прямой код![]() если
если![]() либо
дополнительный код
либо
дополнительный код![]() если
если![]()
Фазовый
детектор ФД,
фильтр
ФР,
интегратор
![]() суммирующий
элемент и управляемый генератор УГ
образуют
канал вычисления ускорения. Выходное
напряжение
суммирующий
элемент и управляемый генератор УГ
образуют
канал вычисления ускорения. Выходное
напряжение
![]() детектораФД
пропорционально
разности фаз сигналов на его входах
или, иначе,
детектораФД
пропорционально
разности фаз сигналов на его входах
или, иначе,
![]() пропорционально
интегралу от разности между выходной
частотой
пропорционально
интегралу от разности между выходной
частотой![]() нуль-органаИО2
и
частотой генератора УГ.
В
операторной форме выходное
напряжение ФД
нуль-органаИО2
и
частотой генератора УГ.
В
операторной форме выходное
напряжение ФД
![]()
где![]() —постоянный
коэффициент; р—оператор Лапласа.
—постоянный
коэффициент; р—оператор Лапласа.
Выходной
сигнал ФД
непосредственно
подан на первый вход сумматора и
через интегратор
![]() с
передаточной функцией—
с
передаточной функцией—
![]() на
его второй вход.
на
его второй вход.
Следовательно, напряжение на выходе сумматора
![]()
Частота
генератора
![]() пропорциональна
с учетом коэффициента
пропорциональна
с учетом коэффициента![]() входному
управляющему напряжению
входному
управляющему напряжению![]()
Следовательно,

Рассмотреннаясхема
(рис. 8.6) обладает возможностью измерения
значительно
более низких скоростей и ускорении
вращения. Однако сам принцип построения
такого типа преобразователей имеет
методическую погрешность, влияние
которой на линейность его характеристики
выявляется из выражения; для
информационной емкости преобразователя![]() равной
равной
![]()
Как
следует из приведенного выражения, эта
погрешность определяется соотношением
![]() Устройства,
обеспечивающие оптимизацию соотношения
Устройства,
обеспечивающие оптимизацию соотношения![]() приводят
к усложнению цифрового блока умножения
при измерении низких
скоростей, поскольку при этом требуется
большое число разрядов выходных
кодов реверсивного счетчика и блока
измерения периодов.
приводят
к усложнению цифрового блока умножения
при измерении низких
скоростей, поскольку при этом требуется
большое число разрядов выходных
кодов реверсивного счетчика и блока
измерения периодов.
К
недостаткам такого построения
преобразователей относятся также и
ограничения
применения, поскольку не все СКВТ
допускают
работу в режиме вращающегося
поля. Так, например, СКВТ
типа
5 БВТ, 2,5 БВТ, СКТ 6465 Д. ДСПУ-128
и другие не имеют квадратурной обмотки
[48]. Не все СКВТ допускают
изменение частоты запитки в широком
диапазоне с целью уменьшения методической
погрешности преобразования скорости,
т. е. оптимизацию соотношения![]() Кроме
того, изменение
Кроме
того, изменение![]() сопровождается
переходными процессами
в формирователе синусоидальных
напряжений и в ФВ,
что
ограничивает
быстродействие преобразователя.
сопровождается
переходными процессами
в формирователе синусоидальных
напряжений и в ФВ,
что
ограничивает
быстродействие преобразователя.
Дрейф нуля и выходные токи интегратора в системе ФАПЧ обусловливают «паразитный» сдвиг фазы, что вносит дополнительную погрешность в изменение ускорения, а это особенно существенно при его малом значении.
Все вышеизложенное приводит к необходимости исследования иных путей построения совмещенного преобразователя угла, скорости и ускорения в код.