

12.1. Преобразователи с синусно-косинусным пзу
Особый
интерес представляют функциональные,
структурные и схемотехнические
особенности построения ЦПП сигналов
СКВТ в двоичный код угла последовательного
приближения [54]. В таком ЦПП использован
традиционный метод
преобразования [3], который заключается
в формировании из сигналов СКВТ
сигнала рассогласования по полному
алгоритму![]()
![]() Получаемое
рассогласование сводится к нулю
поразрядно по методу
последовательных приближений.
Получаемое
рассогласование сводится к нулю
поразрядно по методу
последовательных приближений.
В течение каждого периода опорного сигнала происходит один цикл преобразования, в котором последовательно формируются 12 разрядов выходного кода (рис. 12.1). После установления выходного сигнала Конец счета выход-
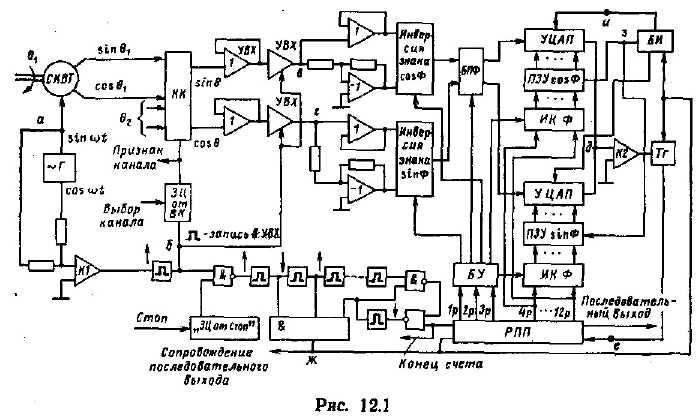
ной код может быть выведен для обработки. В любой момент времени допускается изменение входного сигнала Выбор канала, при этом цикл преобразования не нарушается, а выходной сигнал Признак канала всегда соответствует действительному каналу, сигналы которого преобразуются в данном цикле. По мере формирования разрядов выходного кода они могут последовательно выводиться синхронно с импульсами выходного сигнала Сопровождение последовательного выхода. По входному сигналу Стоп можно асинхронно прерывать последовательность циклов преобразования, при этом независимо от момента подачи сигнала Стоп текущий цикл заканчивается, а останов происходит после того, как сформирован код.
Преобразователь характеризуется следующими особенностями построения: преобразованием переменных входных сигналов в постоянные с использованием устройств выборки — хранения УВХ; возможностью установки минимально необходимого времени формирования выходного кода 1-го (старшего), 2—4-го разрядов и группы 5— 12-го разрядов; использованием постоянного запоминающего устройства ПЗУ с управляемыми инверторами входного кода для функционального преобразования кода угла в код его тригонометрической функции; распространением октантных функций на полный угол с использованием инверсии знака сомножителя, перемены функций и инверсии кода аргумента ПЗУ; синхронным импульсным питанием ПЗУ для уменьшения потребляемой мощности; синхронной записью кодов ПЗУ в регистры ЦАП и динамической синхронной записью разрядных кодов в регистр последовательного приближения РПП для выполнения помехозащищенности преобразователя.
Входящий
в состав преобразователя генератор Г
вырабатывает
два выходных
сигнала:
![]() первый
из которых (рис 12.2,а) используется для
запитывания СКВТ,
а
оба вместе позволяют получить сигнал
промежуточной фазы для формирования
импульса записи (рис. 12.2,б) в УВХ.
Этой
цели служат
компаратор К1
и
одновибратор по фронту. Фронт импульса
записи также
разрешает смену канала преобразования
(коммутатор каналов КК),
первый
из которых (рис 12.2,а) используется для
запитывания СКВТ,
а
оба вместе позволяют получить сигнал
промежуточной фазы для формирования
импульса записи (рис. 12.2,б) в УВХ.
Этой
цели служат
компаратор К1
и
одновибратор по фронту. Фронт импульса
записи также
разрешает смену канала преобразования
(коммутатор каналов КК),

если к
моменту его возникновения изменяется
состояние входа Выбор
канала (блока
защиты цикла ЗЦ
от
ВК).
На
выходах УВХ
формируются
сигналы, пропорциональные![]() (рис.
12.2,в) и
(рис.
12.2,в) и
![]() (рис.
12.2,г), неизменные в течение
всего цикла преобразования. Для установки
нулевого смещения синусного и
косинусного каналов УВХ
предусмотрены
регулировки смещения
(рис.
12.2,г), неизменные в течение
всего цикла преобразования. Для установки
нулевого смещения синусного и
косинусного каналов УВХ
предусмотрены
регулировки смещения
![]() и
и ![]()
Четыре постоянных сигнала,
соответствующих![]() поступают
на аналоговые ключи, инвертирующие
знак сигналов на аналоговых входах
УЦАП и меняющих подключаемые входы
местами (блок перемены функций
БПФ).
Равенство
коэффициентов передачи УЦАП
устанавливается
соответствующей
регулировкой.
поступают
на аналоговые ключи, инвертирующие
знак сигналов на аналоговых входах
УЦАП и меняющих подключаемые входы
местами (блок перемены функций
БПФ).
Равенство
коэффициентов передачи УЦАП
устанавливается
соответствующей
регулировкой.
Цифровой
код Ф
на
входы УЦАП
поступает
через управляемые инверторы кода
ИКФ
и
ПЗУ
функций
![]() в
пределах
в
пределах
![]() Сигналы
управления
инверсией кодов
Сигналы
управления
инверсией кодов![]() а
также сигналы управления аналоговыми
ключами инверсии знаков и перемены
функций вырабатываются логический
блоком управления БУ
по
коду трех старших разрядов. Структура
блока
определяется таблицей истинности (рис.
12.3), которая в свою очередь следует из
необходимости построить функции
а
также сигналы управления аналоговыми
ключами инверсии знаков и перемены
функций вырабатываются логический
блоком управления БУ
по
коду трех старших разрядов. Структура
блока
определяется таблицей истинности (рис.
12.3), которая в свою очередь следует из
необходимости построить функции![]() в
пределах пол-
в
пределах пол-
ного
угла, используя указанные ПЗУ
(в
строке а
рис
12.3 указан код октанта).
При этом замена прямого кода аргумента
ПЗУ
его
поразрядным дополнением (инверсия
кода) позволяет реализовать участки
убывания![]() и
возрастания
и
возрастания
![]() (строки
бив
рис 12.3 отражают порядок инверсии кодов
(строки
бив
рис 12.3 отражают порядок инверсии кодов
![]() О
—нет инверсии, 1 — инверсия). Отрицательные
значения сомножителя
О
—нет инверсии, 1 — инверсия). Отрицательные
значения сомножителя
![]() заменяются
инверсией знака сомножителей
заменяются
инверсией знака сомножителей![]() или
или
![]() (строки
г,
д). Требуемые
участки функций подставляются в
зависимости
(строки
г,
д). Требуемые
участки функций подставляются в
зависимости
![]() переменной
подключаемых входов УЦАП (строкае).
переменной
подключаемых входов УЦАП (строкае).
На входе
компаратора К2
происходит
суммирование произведений и формируется
сигнал рассогласования
![]() который
через триггер посту
который
через триггер посту
![]() пает
на информационный вход РПП.
Цикл
работы РПП
состоит
из 12 разряд ных
и одного вспомогательного тактов,
задаваемых внешним (по отношению к
РПП)
генераторам
тактовых импульсов (на рис 12.1 он образован
одновиб-раторами и элементами И—НЕ).
пает
на информационный вход РПП.
Цикл
работы РПП
состоит
из 12 разряд ных
и одного вспомогательного тактов,
задаваемых внешним (по отношению к
РПП)
генераторам
тактовых импульсов (на рис 12.1 он образован
одновиб-раторами и элементами И—НЕ).
По фронту положительного импульса каждого из разрядных тактов на параллельном выходе РПП формируется код, вызывающий сигнал рассогласования определенного значения (рис. 12,2,д). Логические сигналы, соответствующие знаку рассогласования, записываются в РПП, начиная со старшего разряда (рис 12.2,е).
Тактовый
генератор вырабатывает 12 положительных
импульсов с короткими интервалами
между ними (рис 12.2,ж). Длительность
импульсов определяется
необходимый временем установления
сигнала рассогласования, зависящим
от ряда задержек, в частности связанных
с инерционностью в цепи сигналов![]() Эти
задержки в основном зависят от изменения
сигналов ОУ
(в
данном случае — выходных токов), которые
убывают с увеличением номера
определяемого разряда. Поэтому для
повышения быстродействия целесообразно
уменьшать время определения разрядов
(длительность тактовых импульсов)
с увеличением номера разряда.
Эти
задержки в основном зависят от изменения
сигналов ОУ
(в
данном случае — выходных токов), которые
убывают с увеличением номера
определяемого разряда. Поэтому для
повышения быстродействия целесообразно
уменьшать время определения разрядов
(длительность тактовых импульсов)
с увеличением номера разряда.
Используемый в преобразователе генератор тактовых импульсов позволяет выбрать минимально необходимую различную длительность импульсов для четырех старших разрядов и одинаковую для остальных. Каждый цикл начинается с окончанием импульса записи в УВХ запуском генератора тактовых импульсов и заканчивается выдачей из РПП сигнала Конец счета, останавливающего генератор, после чего цикл повторяется. Время между появлением сигнала Конец счета и передним фронтом импульса записи можно использовать для считывания данных из РПП.
Поскольку используемые в преобразователе УЦАП содержат входные регистры, оказалось возможный синхронно с импульсами подачи питающего напряжения на ПЗУ (рис. 12.2,з) от блока импульсов БИ записывать коды из ПЗУ в регистры УЦАП (рис 12.2,и). Импульсы питающего напряжения (рис 12.2,з) подаются на ПЗУ в начале каждого тактового импульса (рис. 12.2,ж). Через некоторый интервал времени, необходимый для устранения кода на выходе ПЗУ, вырабатывается синхроимпульс записи кода в регистры УЦАП (рис. 12.2,и), и код записывается, после чего питание ПЗУ прекращается до прихода следующего тактового импульса. Таким образом удалось снизить долю мощности потребления ПЗУ по отношению к общей мощности потребления пользователя с 80 до 10%.
Методика
регулировки преобразователя сводится
к установке нулевого смещения
на входах инвертора знака![]() при
нулевых сигналах на входах КК и к
обеспечению равенства коэффициентов
передачи каналов синусного
и косинусного УЦАП.
Второе
условие выполняется, если при подаче
на входы
инвертора знака
при
нулевых сигналах на входах КК и к
обеспечению равенства коэффициентов
передачи каналов синусного
и косинусного УЦАП.
Второе
условие выполняется, если при подаче
на входы
инвертора знака
![]() одного
постоянного напряжения, например
+10 В, в точке суммирования выходных
сигналов УЦАП
напряжение
равно
нулю с наименьшей погрешностью для
кодов 001, 011, 101, 111 на входе блока
управления.
одного
постоянного напряжения, например
+10 В, в точке суммирования выходных
сигналов УЦАП
напряжение
равно
нулю с наименьшей погрешностью для
кодов 001, 011, 101, 111 на входе блока
управления.
Для КК,
инверторов
знака![]() и
коммутатора функций в преобразователе
использованы аналоговые ключи типа
К590КН7; УВХ
типа
K1100К2;
повторители и инверторы аналоговых
сигналов построены на ОУ
типа
К153УД6 и резистввных матрицах 316НР1; УЦАП
типа
К572ПА2А; ПЗУ
типа
К505РЕ30068...0071; компараторы типа К521САЗ;
РПП
типа
К564ИР13.
Все остальные микросхемы — логические
серии К564 малой и средней
степеней интеграции [34].
и
коммутатора функций в преобразователе
использованы аналоговые ключи типа
К590КН7; УВХ
типа
K1100К2;
повторители и инверторы аналоговых
сигналов построены на ОУ
типа
К153УД6 и резистввных матрицах 316НР1; УЦАП
типа
К572ПА2А; ПЗУ
типа
К505РЕ30068...0071; компараторы типа К521САЗ;
РПП
типа
К564ИР13.
Все остальные микросхемы — логические
серии К564 малой и средней
степеней интеграции [34].
Длительности тактовых импульсов (рис 12.2,ж) не требуют индивидуальной регулировки и могут устанавливаться выбором номиналов времязадающих элементов одновибраторов, используемых в генераторе: тактовых импульсов для формирования необходимой тактовой последовательности. Для формирования разрядных кодов преобразователя, построенного на перечисленных элементах, требуются тактовые импульсы, имеющие наименьшие длительности: 1р и 2р— 35 мкс, 3р—25 мкс, 4р—10 мкс, 5р-12р-12 мкс. Длительность интервалов между тактовыми импульсами 1 мкс Длительность импульса питания ПЗУ (рис 12.2,з) составляет 2 мкс Длительность импульса записи в регистры УЦАП (рве. 12,2,ы) равна 0,2 мкс. Начало импульса записи в регистры УЦАП запаздывает относительно начала импульса питания ПЗУ на 1,7 мкс
Погрешность совпадения окончания импульса в УВХ с моментом достижения входными сигналами амплитудного значения может быть относительно большой (допустимо отклонение 1—5% периода). Поэтому длительность этого импульса задается выбором номиналов постоянных элементов. Изменение может потребоваться только при перестройке частоты генератора Г входного сигнала СКВТ (рис 12.2,а).
Т![]() акой
ЦПУ, выполненный на корпусных ИМС,
позволил получить следующее
характеристики (в нормальных условиях
эксплуатации): информационную
емкость (разрядность) 12 бит; число
каналов 2; максимальную погрешность
воспроизводства уровней квантования
акой
ЦПУ, выполненный на корпусных ИМС,
позволил получить следующее
характеристики (в нормальных условиях
эксплуатации): информационную
емкость (разрядность) 12 бит; число
каналов 2; максимальную погрешность
воспроизводства уровней квантования
![]() полное
время цикла преобразования
280 мкс; время формирования выходного
кода 220 мкс; время сохранения
кода для считывания 30 мкс; частоту
встроенного генератора опор-ного
сигнала 3670 Гц; амплитуду опорного
сигнала (двойную) 21 В; диапазон амплитуд
(двойных) входных сигналов 2—12 В; мощность
потребления от источников пнтаиня
полное
время цикла преобразования
280 мкс; время формирования выходного
кода 220 мкс; время сохранения
кода для считывания 30 мкс; частоту
встроенного генератора опор-ного
сигнала 3670 Гц; амплитуду опорного
сигнала (двойную) 21 В; диапазон амплитуд
(двойных) входных сигналов 2—12 В; мощность
потребления от источников пнтаиня![]() выходной
код с уровнями ТТЛ
—прямой, параллельный или последовательный
с сопровождающими син-хроимпульсами;количество
регулировок 3; габаритные размеры
выходной
код с уровнями ТТЛ
—прямой, параллельный или последовательный
с сопровождающими син-хроимпульсами;количество
регулировок 3; габаритные размеры![]()
В
процессе налаживания и эксплуатации
преобразователя (см. рис. 12,1) выявилась
специфическая дополнительная погрешность,
которая состоит в пропуске
кода в четырех квадрантных точках
![]() Причина
пропуска кода связана с использованием
ПЗУ упомянутых типоиоминалов для
функционального
преобразования кодов. Одна из возможностей
устранения указанных
пропусков кода связана с применением
модифицированных ПЗУ в
дополнение к существующим. Такие ПЗУ
должны содержать код, записанный с
избытком, что получается сдвигом кодов
аргументов вправо на единицу младшего
разряда.
Причина
пропуска кода связана с использованием
ПЗУ упомянутых типоиоминалов для
функционального
преобразования кодов. Одна из возможностей
устранения указанных
пропусков кода связана с применением
модифицированных ПЗУ в
дополнение к существующим. Такие ПЗУ
должны содержать код, записанный с
избытком, что получается сдвигом кодов
аргументов вправо на единицу младшего
разряда.
В
стандартных ПЗУ серии К505РЕЗ код функции
записан с недостатком, т.
е, эквивалент значения кода всегда
меньше математического значения
функ-цин,
как показано на рис 12.3. На границах
октантов происходит инверсия кода
аргумента ПЗУ для распространения
зависимости, записанной в ПЗУ для
первого октанта на остальные октанты.
В квадрантных точках такая инверсня
приводит
к нарушению строгой монотонности сиены
кодов. Например, последний
код аргумента функций![]() в
первом квадранте 11 ... 1 сменяется первым
кодом
00 ... 0 аргумента той же функции во втором
квадранте, однако для ПЗУ в
точке перехода происходит инверсия
кода аргумента, в результате чего код
аргумента,
а следовательно, н код функция ПЗУ
остаются неизменными.
в
первом квадранте 11 ... 1 сменяется первым
кодом
00 ... 0 аргумента той же функции во втором
квадранте, однако для ПЗУ в
точке перехода происходит инверсия
кода аргумента, в результате чего код
аргумента,
а следовательно, н код функция ПЗУ
остаются неизменными.
Ниже показано, как устранить этот недостаток, применяя стандартные микросхемы ПЗУ в ФЦАП, предназначенные для использования в преобразователе угол—амплитуда —код, допускающем реализацию в интегральном исполнение (см. рис 12.1).
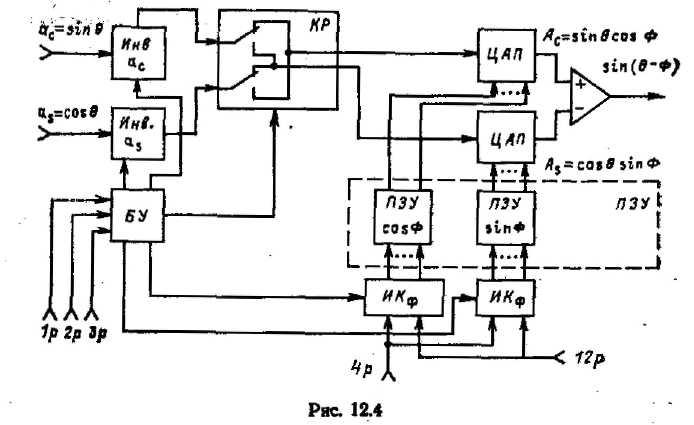
Функциональная
схема ФЦАП приведена на рис. 12.4 [62]. В
качестве умножающих
ЦАП
в
нем использованы микросхемы К572ПА2А,
ПЗУ
включает
комплект микросхем К505РЕ30068—К505РЕ30071.
Каждая из микросхем ПЗУ
имеет
организацию![]() и
содержит часть 16-разрядного кода
функции
и
содержит часть 16-разрядного кода
функции![]() в
пределах одного октанта: соответственно
К505РЕ30068 и К505РЕ30069
в
пределах одного октанта: соответственно
К505РЕ30068 и К505РЕ30069
![]() а
К505РЕ30070 н K505PE3Q071
1р—8р
и
а
К505РЕ30070 н K505PE3Q071
1р—8р
и
![]() Подачей
логического нуля на вход Выбор
кристалла (ВК)
микросхемы можно отключать ее выход
для магистральной передачи кодов.
Коды функций в ПЗУ
записаны
таким образом, что соответствующее им
значение
всегда не больше истинного значения
функции sin
Ф
(рис.
12.5,а). Порядок
распространения зависимости
Подачей
логического нуля на вход Выбор
кристалла (ВК)
микросхемы можно отключать ее выход
для магистральной передачи кодов.
Коды функций в ПЗУ
записаны
таким образом, что соответствующее им
значение
всегда не больше истинного значения
функции sin
Ф
(рис.
12.5,а). Порядок
распространения зависимости
![]() октанты
и
октанты
и
![]() на
на![]() октанты
с использованием инверторов сигналов
октанты
с использованием инверторов сигналов
![]() инвер
инвер![]() торов
кода ИК,
угла
Ф,
коммутатора
функций
торов
кода ИК,
угла
Ф,
коммутатора
функций
![]() в
блока управления БУ
(рис.
12.4) рассмотрен выше, при этом отмечено
наличие инструментальной погрешности,
связанной с нарушением строгой
монотонности смены кода в квадрантных
точках. Погрешность проявляется как в
виде пропуска очередного кода
в этих точках, так и в виде периодически
накапливающейся ошибки, вызванной
искажением формы зависимостей
в
блока управления БУ
(рис.
12.4) рассмотрен выше, при этом отмечено
наличие инструментальной погрешности,
связанной с нарушением строгой
монотонности смены кода в квадрантных
точках. Погрешность проявляется как в
виде пропуска очередного кода
в этих точках, так и в виде периодически
накапливающейся ошибки, вызванной
искажением формы зависимостей
![]() по
их среднекодовому
значению относительно математически
точных функций. Поскольку код перемножается
с аналоговым сигналом, указанную
погрешность можно скомпенсировать
как в аналоговой, так в цифровой форме,
однако с точки зрения стабильности
результата и технологичности
предпочтителен цифровой способ
компенсации,
не требующий настройки.
по
их среднекодовому
значению относительно математически
точных функций. Поскольку код перемножается
с аналоговым сигналом, указанную
погрешность можно скомпенсировать
как в аналоговой, так в цифровой форме,
однако с точки зрения стабильности
результата и технологичности
предпочтителен цифровой способ
компенсации,
не требующий настройки.
Суть
способа заключается в формировании
зависимостей, скорректирован-ных
относительно исходных таким образом,
что выполняются условия строгой
монотонности
смены кодов, а также постоянства и
равенства 90° сдвига между
взаимно соответствующими границами
смены кодов
![]() Как
следует
из рис. 12.5,а, удовлетворить указанным
условиям можно, смещая определенные
участки зависимостей вправо в влево
от исходных на единицу
Как
следует
из рис. 12.5,а, удовлетворить указанным
условиям можно, смещая определенные
участки зависимостей вправо в влево
от исходных на единицу
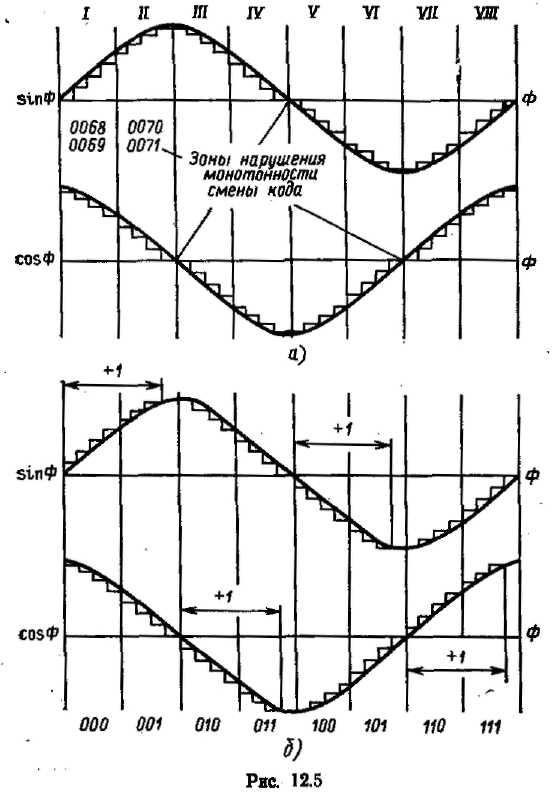
МВР,
что достигается вычитанием или
суммированием единицы с кодом аргумента
на определенных участках
![]() Поскольку
реализация суммирования
кодов конструктивно несколько проще,
далее рассмотрен именно-этот
случай.
Поскольку
реализация суммирования
кодов конструктивно несколько проще,
далее рассмотрен именно-этот
случай.
На рис
12.5,б представлены зависимости кодов
![]() полученные
полученные
суммированием
единицы с кодом аргумента
![]() для
кодов от 000 ... 00 до-001
... 10 и от 100 ... 00 до 101 ... 10 и суммированием
единицы с кодом аргумента
для
кодов от 000 ... 00 до-001
... 10 и от 100 ... 00 до 101 ... 10 и суммированием
единицы с кодом аргумента![]() для
кодов от 010 ... 00 до 011 ... 10 и от ПО ... 00 до
111 ... 10.. Зависимости
удовлетворяют отмеченным условиям,
поэтому периодическая ошибка,
а также пропуск кода в ФЦАП отсутствуют.
Постоянный сдвиг сред-некодовых
значений
для
кодов от 010 ... 00 до 011 ... 10 и от ПО ... 00 до
111 ... 10.. Зависимости
удовлетворяют отмеченным условиям,
поэтому периодическая ошибка,
а также пропуск кода в ФЦАП отсутствуют.
Постоянный сдвиг сред-некодовых
значений
![]() на
1/2 МВР влево проявляется как постоянная
составляющая погрешности во всей
диапазоне преобразуемых углов и
может быть скомпенсирована известными
методами.
на
1/2 МВР влево проявляется как постоянная
составляющая погрешности во всей
диапазоне преобразуемых углов и
может быть скомпенсирована известными
методами.
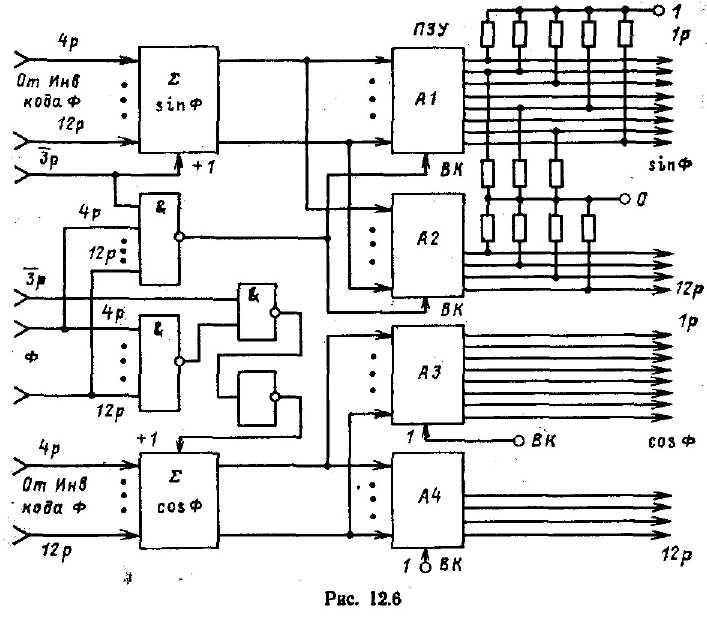
На
рис. 12.6 представлена функциональная
схема ПЗУ на девять входных разрядов,
реализующего описанный способ
компенсации. Блок содержит сумматоры![]() кодов
аргумента
кодов
аргумента![]() с
единицей, для которых использованы
микросхемы
К564ЛП2, К564ЛА7 и К564ЛН2; логические схемы
И —НЕ отключения-
выхода ПЗУ
для
кодов аргумента
с
единицей, для которых использованы
микросхемы
К564ЛП2, К564ЛА7 и К564ЛН2; логические схемы
И —НЕ отключения-
выхода ПЗУ
для
кодов аргумента
![]() 0001
...
11 и 1001 ...
11 в
0001
...
11 и 1001 ...
11 в
![]() 0101
...
11 я 1101 ...
11 а отмены суммирования для кодов
аргумента
0101
...
11 я 1101 ...
11 а отмены суммирования для кодов
аргумента
![]() 001
...
11 в 101 ...
11 и
001
...
11 в 101 ...
11 и![]() ОН...
И в 111
...
И на микросхемах К564ЛА8
и К564ЛА7 и комплект ПЗУ А1—А4
К505РЕЗ
(0068 ...
0071).
ОН...
И в 111
...
И на микросхемах К564ЛА8
и К564ЛА7 и комплект ПЗУ А1—А4
К505РЕЗ
(0068 ...
0071).
При поступлении на вход блока ПЗУ кодов 0001 ... 11, 0101 ... 11, 1001 ... 11 и 1101 ... 11 на выходах At и А2 должен установиться код, следующий за наибольшим кодом, записанным там фактически. Это код Ф=45° — 101101010000, для формирования которого по входу ВК выходы At и А2 отключаются, а логические уровни на них определяются комбинацией резисторов (с номиналами по 10 кОм), соединяющих выходы с источником питания 5 В (логическая 1) или нулевой шиной (логический 0). При поступлении на вход блока ПЗУ кодов 001 ... 11, ОН ... 11, 101 ... 11 и 111 ... 11 отмечается суммирование единицы к аргументу в A3 и А4, что приводит к повторению значения выходного кода, однако на этом участке изменения функции в пределах МБР выходного хода фактически нет, поэтому повторение кода допустимо.
Таким
образом, инструментальная погрешность
формирования на выходе-ФЦАП
сигнала
![]() определяется
исключительно УЦАП, инверторами
аналоговых сигналов
определяется
исключительно УЦАП, инверторами
аналоговых сигналов
![]() и
коммутатором функций, а при правильном
выборе
и включения последних — только
дифференциальной нелинейностью УЦАП_
и
коммутатором функций, а при правильном
выборе
и включения последних — только
дифференциальной нелинейностью УЦАП_