

7.2.4. Многоотсчетные пфк накапливающею типа
На рис. 7.13 представлена функциональная схема одного из вариантов построения ПФК, в которой ГО формируется на основании ТО [17]. Схемы такого типа называются двухотсчетными ПФК накапливающего типа.
Опорное![]() и
сигнальное
и
сигнальное![]() напряжения
с выходаФВ
через
нуль-органы НО1
и
НО2
поступают
на формирователи старт- и стоп-импульсов
Ф1
в
Ф2.
В
исходном состоянии триггеры T1,
T2
и
счетчик С
находятся
в состоянии 0. С
приходом старт-импульса триггер Т1
устанавливается
в состояние 1, открываются
элементы И1,
И2 и
импульсы генератора ГИ
через
элемент И2
поступают
на вход счетчика С.
С
приходом стоп-импульса триггер Т2
устанавливается
в
положение 1, закрывается элемент И2
и
значения кода двух старших разрядов
счетчика С
переписываются
через элементы И4
в
триггеры ТЗ
и Т4, Затем
открывается элемент ИЗ,
а
счетчик С и триггеры Т1 н Т2
устанавливаются
в
0. Триггеры Т2 и Т4 меняют свои состояния
с 1 на 0, а на обоих входах элемента
И5 формируются импульсы, образованные
дифференцирующими це-
напряжения
с выходаФВ
через
нуль-органы НО1
и
НО2
поступают
на формирователи старт- и стоп-импульсов
Ф1
в
Ф2.
В
исходном состоянии триггеры T1,
T2
и
счетчик С
находятся
в состоянии 0. С
приходом старт-импульса триггер Т1
устанавливается
в состояние 1, открываются
элементы И1,
И2 и
импульсы генератора ГИ
через
элемент И2
поступают
на вход счетчика С.
С
приходом стоп-импульса триггер Т2
устанавливается
в
положение 1, закрывается элемент И2
и
значения кода двух старших разрядов
счетчика С
переписываются
через элементы И4
в
триггеры ТЗ
и Т4, Затем
открывается элемент ИЗ,
а
счетчик С и триггеры Т1 н Т2
устанавливаются
в
0. Триггеры Т2 и Т4 меняют свои состояния
с 1 на 0, а на обоих входах элемента
И5 формируются импульсы, образованные
дифференцирующими це-
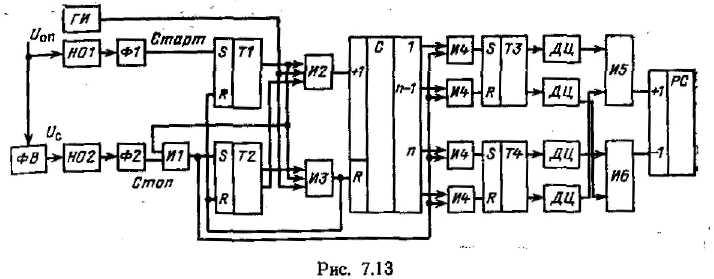
почками ДЦ, из фронтов выходных сигналов ТЗ и Т4. При этом с выхода И$ импульс поступает на вход сложения реверсивного счетчика PC. Импульс с выхода И6 поступает на вход вычитания счетчика PC, если триггеры ТЗ, Т4 одновременно меняют свои состояния с 0 на 1. Во всех других случаях элементы; И5 и И6 будут закрыты и на вход PC импульсы поступать не будут.
Из этого следует, что когда код двух старших разрядов счетчика С точного отсчета изменяется со значения 11 на 00, в реверсивный счетчик записывается-+1 при переходе полного значения временного интервала в сторону увеличения. В противоположном случае, когда код двух старших разрядов счетчика С точного отсчета изменяется с 00 на 11 при переходе полного значения временного интервала в сторону уменьшения, в реверсивный счетчик ГО записывается —К
Достоинствами рассматриваемой схемы являются относительная простота реализации и отсутствие дополнительного датчика ГО, а также как следствие— отсутствие схемы согласования отсчетов. Однако, как и все ПФК накапливающего типа, данная схема при любой помехе или сбое в работе дает существенную погрешность измерения перемещения 8 за счет возможной частичной или полной потери информации, что является в общем случае недопустимым, особенно при работе в системах автоматического управления, программного управления и т. д. Все это, вместе взятое, ограничивает применение преобразователей с ГО накапливающего типа.,
ГЛАВА ВОСЬМАЯ
Фазовые преобразователи скорости и ускорения
8.1. Способы формирования скоростного сигнала
Получение цифровых эквивалентов скорости и ускорения перемещений может быть осуществлено различными методами. Ряд из них базируется на использовании аналоговых тахометров и акселерометров, обеспечивающих представление параметра в виде напряжения постоянного или переменного тока. Последующее кодирование этого сигнала производится АЦП. Применение механизмов с разветвленной Кинематической схемой, раздельными аналоговыми первичными преобразователями положения, скорости и ускорения помимо увеличения стоимости приводит к усложнению эксплуатации и снижению надежности
устройства. Наиболее остро эти особенности проявляются при создания инфор-мационно-силовых модулей (ИСМ) роботов, в которых перспективны низкооборотные безредукторные приводы с моментными двигателями [77], Реализация измерителя низких частот вращения традиционными для редукторных систем методами затруднена.
С точки зрения упрощения механизма представляют интерес цифровые та-жоыетры и акселерометры, использующие в качестве первичного преобразователя имеющийся в системе ЦПУ. При этом цифровые эквиваленты угловой скорости и ускорения определяют методом цифрового дифференцирования соответственно значений угла и скорости. Следует отметить, что связанные с этим вычисления, выполняемые управляющей микроЭВМ, требуют больших затрат машинного времени, что в быстродействующих системах неприемлемо. Существенное упрощение механизма, не связанное с дополнительными затратами машинного времени при получении кодов угла, скорости и ускорения, от одного первичного преобразователя достигается при использовании СКВТ в сочетании с микроэлектронной отсчетной частью, обеспечивающей формирование необходимых цифровых эквивалентов параметров движения.
В связи с тем, что в отечественной технике ЦПУ преимущественное распространение получили фазовые методы преобразования угла в код [11, 22], вполне естественным является подробное рассмотрение способов получения кодов скорости и ускорения от первичного преобразователя угла, работающего в фазовом режиме. Важность проведения исследований в этом направлении определяется и тем, что при формировании в СКВТ вращающегося поля (режим ФВ) возможно построение многофункциональной отсчетной части, осуществляющей совмещенное преобразование величины, скорости и ускорения перемещения в их цифровые эквиваленты [а. с. 934382, 994990 и 1101740 (СССР)}.
Для получения малого порога чувствительности при измерении низких скоростей применяется параметрический преобразователь масштаба угла (ПМУ), в котором целесообразно фиксировать изменения частоты сигнального напряжения многополюсного ФВ, пропорциональные угловой скорости вала [22]. Поскольку изменения частоты, обусловленные угловой скоростью в, чрезвычайно малы, для обеспечения возможности их регистрации необходимо перенести их в область более высоких частот, т. е. произвести умножение частоты. При этом управление высокочастотным генератором производится по принципу фазовой автоподстройки частоты (ФАПЧ).
Известны
также иные способы получения скоростного
сигнала от СКВТ,
работающего
в режиме ФВ.
В
способе, описанном в а. с. 394831 (СССР)
угловая
скорость вращения вала преобразуется
в скорость изменения фазового сдвига
выходного напряжения фазовращателя,
а затем в частоту следования им-яульсов.
На рис. 8.1 представлена функциональная
схема такого устройства. Принцип
действия устройства состоит в следующем.
Генератор Г вырабатывает синусоидальное
высокочастотное напряжение со стабильной
частотой![]() Это
напряжение поступает на делитель
частоты ДЧ,
который
уменьшает ее до .
значения
Это
напряжение поступает на делитель
частоты ДЧ,
который
уменьшает ее до .
значения![]() необходимого
для питания ФВ.
Питание
статора ФВ производится через
фазорасщепительное устройство ФСУ.
Многополюсный ФВ
осуществляет
преобразование
угла поворота вала в в фазовый
сдвиг
необходимого
для питания ФВ.
Питание
статора ФВ производится через
фазорасщепительное устройство ФСУ.
Многополюсный ФВ
осуществляет
преобразование
угла поворота вала в в фазовый
сдвиг![]() синусоидального
напряжения
с частотой
синусоидального
напряжения
с частотой![]() Сдвинутое
по фазе напряжение с выхода ФВ
поступает
на умножитель частоты УЧ,
который
производит преобразование частоты,
увеличивая
ее до значения
Сдвинутое
по фазе напряжение с выхода ФВ
поступает
на умножитель частоты УЧ,
который
производит преобразование частоты,
увеличивая
ее до значения![]() генератора.
генератора.
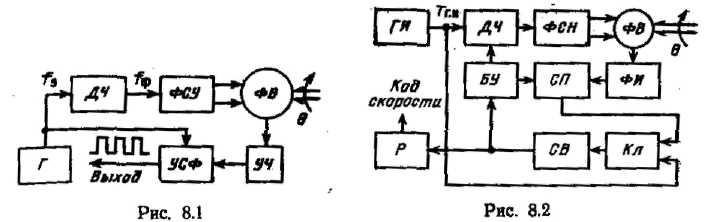
В результате угол поворота 0 преобразуется в фазовый сдвиг высокочастотного синусоидального напряжения относительно эталонного напряжения генератора. Высокочастотное напряжение с выхода генератора и сдвинутое относительно него по фазе синусоидальное напряжение с выхода умножителя УЧ подаются на устройство сравнения фаз напряжений УСФ. Устройство УСФ производит сравнение текущего значения фазового угла высокочастотного напряжения с выхода УЧ с текущим значением фазового угла напряжения генератора н в момент совпадения фаз производит формирование выходных импульсов при изменении фазового сдвига между указанными напряжениями в каждом периоде. Частота следования выходных импульсов пропорциональна частоте вращения ротора ФВ относительно его статора.
Недостатком
этого способа является то, что на входе
ФВ
частота
напряжения![]() является
суммой частот питания ФВ н вращения
ротора ФВ. Для уменьшения
влияния частоты вращения ротора на
выходную частоту ФВ
необходимо
повышать частоту питающего напряжения,
что ведет к уменьшению разрешающей
способности устройства.
является
суммой частот питания ФВ н вращения
ротора ФВ. Для уменьшения
влияния частоты вращения ротора на
выходную частоту ФВ
необходимо
повышать частоту питающего напряжения,
что ведет к уменьшению разрешающей
способности устройства.
Известен другой способ получения скорости сигнала, где ФВ работает в режиме генератора переменной частоты (а. с. 334582 (СССР)]. Сигнал скорости с ФВ здесь формируется путем заполнения высокочастотными импульсами временных интервалов полупериодов напряжения питания и выходного напряжения фазовращателя. Затем сравнивают полученное количество импульсов я по их разности определяют величину н направление частоты вращения оси ФВ.
Недостатком
этого способа является его низкая
точность. Устройство достоверно
выдает только сигнал знака скорости.
Так, если период напряжения питания
фазовращателя обозначить через Т1,
а
период напряжения на его выходе—
через Т2, то частота вращения вала
фазовращателя![]() должна
быть
должна
быть
р![]() авна,
что не соответствует выходному
сигналу
авна,
что не соответствует выходному
сигналу
устройства,который равен Т1—T2 Значительно более точными являются предложенные в [а. с. 881619 (СССР)] измерители частоты вращения, работающие по принципу процентного частотомера.
Функциональная
схема одного из таких устройств
представлена на рис. 8.2.
Напряжение с частотой![]() через
делитель частотыДЧ
поступает
на фор-мирователь
синусоидальных напряжений ФСН,
который в зависимости
от типа применяемого
ФВ
формирует
два или более синусоидальных напряжений,
сдвинутых
по фазе относительно друг друга. В ФВ
при
этом образуется круговое вращающееся
электромагнитное поле с частотой
вращения
через
делитель частотыДЧ
поступает
на фор-мирователь
синусоидальных напряжений ФСН,
который в зависимости
от типа применяемого
ФВ
формирует
два или более синусоидальных напряжений,
сдвинутых
по фазе относительно друг друга. В ФВ
при
этом образуется круговое вращающееся
электромагнитное поле с частотой
вращения
![]() равной
частоте синусоидальных напряжений.
При вращении ротора ФВ
в
направлении, противо-
равной
частоте синусоидальных напряжений.
При вращении ротора ФВ
в
направлении, противо-
наложной
направлению вращения электромагнитного
поля, в выходной обмотке
индуцируется напряжение, частота![]() которого
равна сунне частоты вращения
электромагнитного поля
которого
равна сунне частоты вращения
электромагнитного поля![]() и
частоты вращения ротораФВ
и
частоты вращения ротораФВ
![]() при
совпадении
направлений вращения электромагнитного
поля и ротора фазовращателя
при
совпадении
направлений вращения электромагнитного
поля и ротора фазовращателя
![]() Эта
частота поступает на вход формирователя
импульсов ФИ,
с
выхода
которого прямоугольные импульсы с
частотой
Эта
частота поступает на вход формирователя
импульсов ФИ,
с
выхода
которого прямоугольные импульсы с
частотой
![]() поступают
на счетчикпериодов
СП,
который
открывает ключ Кл
на
время, равное, например, одному периоду.
Импульсы с частотой
поступают
на счетчикпериодов
СП,
который
открывает ключ Кл
на
время, равное, например, одному периоду.
Импульсы с частотой
![]() генератора
импульсов ГИ
поступают
на вход
вычитающего счетчика СВ,
в
который перед началом измерения записано
число
генератора
импульсов ГИ
поступают
на вход
вычитающего счетчика СВ,
в
который перед началом измерения записано
число![]() По
окончании периода 7
в
счетчике СВ будет зафиксировано
По
окончании периода 7
в
счетчике СВ будет зафиксировано
число
![]()
при выполнении условия
где![]()
![]()
При
измерении по такому методу возникает
методическая ошибка, пропорциональная
отношению![]() Для
того чтобы производить измерения
частоты вращения
в широком диапазоне с малой методической
погрешностью, необходимо
поддерживать постоянным это отношение,
что достигается введением блока
управления БУ.
Он
анализирует состояние вычитающего
счетчика СВ
и
изменяет коэффициент пересчета делителя
ДЧ
и
счетчика периодов СП,
причем
если
в делителе ДЧ
коэффициент
уменьшается в
Для
того чтобы производить измерения
частоты вращения
в широком диапазоне с малой методической
погрешностью, необходимо
поддерживать постоянным это отношение,
что достигается введением блока
управления БУ.
Он
анализирует состояние вычитающего
счетчика СВ
и
изменяет коэффициент пересчета делителя
ДЧ
и
счетчика периодов СП,
причем
если
в делителе ДЧ
коэффициент
уменьшается в![]() раз,
то в счетчикеСП
он
увеличивается
в
раз,
то в счетчикеСП
он
увеличивается
в
![]() раз
и наоборот. Выходной сигнал устройства
(рис. 8.2) — код
скорости — снимается с выхода регистра
Р.
раз
и наоборот. Выходной сигнал устройства
(рис. 8.2) — код
скорости — снимается с выхода регистра
Р.
8.2. СОВМЕЩЕННЫЙ ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА И СКОРОСТИ
С точки зрения полноты решения стоящей задачи представляет интерес построение совмещенного цифрового преобразователя углового положения и частоты вращения вала [а. с. 934382 (СССР)]. Канал измерения углового положения в этом преобразователе реализует известный метод преобразования угол — фаза—код. Фазовращатель ФВ используется в режиме вращающегося поля, и для его запитки применяется высокоточный источник опорных квадратурных напряжений с системой автостабилизации фазы [а. с. 1095097 (СССР)]. При определении частоты вращения используется эффект изменения выходной частоты ФВ относительно частоты опорного напряжения. Вместо вычисления разности двух близких частот частоту вращения с высокой точностью определяют как приращение периода выходного сигнала.
На рис. 8.3 представлена схема базового варианта преобразователя углового положения и частоты вращения вала. Преобразователь работает следующим образом.
Счетчик
С1
выполняет
функцию деления частоты генератора
импульсов ГИ.
,
Формирователь опорных сигналов ФОС
вырабатывает
из выходных периодических
сигналов первого счетчика опорные
напряжения ФВ
с
частотой![]() Нуль-орган
НО.
формирует
из выходных синусоидальных сигналов
ФВ
прямоуголь-
Нуль-орган
НО.
формирует
из выходных синусоидальных сигналов
ФВ
прямоуголь-

ные
периодические сигналы, по фронту которых
осуществляется запись кода счетчика
С1
в
регистр Pi.
В
последнем фиксируется код текущего
углового положения
вала 0. Счетчик С2
вместе
с ключом Кл,
дополнительным
триггером Г,
формирователем задержки импульсов ФЗИ
и
регистром Р2
образуют
блок вычисления
частоты вращения![]()
Покажем,
что при выполнении условия
![]() частота
вращения с некоторым
приближением пропорциональна разности
периодов опорного и выходного напряжений
фазовращателя:
частота
вращения с некоторым
приближением пропорциональна разности
периодов опорного и выходного напряжений
фазовращателя:
![]()
Действительно, выходная частота фазовращателя
![]()
причем![]() положительна,
если
положительна,
если![]() и
отрицательна, если
и
отрицательна, если![]() С
учетом (8.2)
С
учетом (8.2)
получаем
![]()
После несложных преобразований (8.4) можно представить в виде
![]()
Разложив в (8.5) выражение в круглых скобках в ряд Тейлора, получим
![]()
Так как
![]() и можно пренебречь
членами высших порядков
и можно пренебречь
членами высших порядков
малости в разложении (8.6) и записать выражение для частоты вращения в виде
![]()
Блок определения частоты вращения работает следующим образом.
По фронту выходного сигнала нуль-органа НО дополнительный триггер Т переходит в нулевое состояние и, воздействуя на управляющий вход ключа Кл, прекращает поступление импульсов ГИ на счетный вход счетчика С2. фронт выходного сигнала нуль-органа НО запускает также ФЗИ, который выдает на своем первом выходе импульс через время, достаточное для завершения распространения переносов в С2. По этому импульсу происходит перезапись кода Счетчнка в регистр Р2. Второй импульс ФЗИ, воздйствуя на входы предустановки С2, осуществляет запись в него кода, соответствующего промежутку временя между фронтом импульса НО и началом импульса на третьем выходе ФЗИ. Этот импульс поступает на установочный вход триггера Т и переводит его в единичное состояние, после чего открывается ключ Кл и импульсы ГИ вновь поступают на счетный вход С2.
Таким
образом, в Р2 в начале каждого следующего
периода выходного сигнала
НО
фиксируется
код разности![]() определенный
в предыдущем периоде
выходного сигнала НО.
Считаем
вначале, что
определенный
в предыдущем периоде
выходного сигнала НО.
Считаем
вначале, что![]() Так
как второй счетчик
имеет разрядность, равную разрядности
первого счетчика плюс дополнительный
знаковый разряд, то через время,
равное
Так
как второй счетчик
имеет разрядность, равную разрядности
первого счетчика плюс дополнительный
знаковый разряд, то через время,
равное![]() после
начала выходногосигнала
НО,
знаковый
разряд второго счетчика устанавливается
в единичное состояние,
а цифровые разряды сбрасываются в
нулевое состояние. После этого счетчик
подключается к ГИ
еще
на время, равное
после
начала выходногосигнала
НО,
знаковый
разряд второго счетчика устанавливается
в единичное состояние,
а цифровые разряды сбрасываются в
нулевое состояние. После этого счетчик
подключается к ГИ
еще
на время, равное![]() т,
е. в цифровых разрядах
будет код, пропорциональный разрядности
т,
е. в цифровых разрядах
будет код, пропорциональный разрядности
![]() а
знаковый разряд остается
в нулевом состоянии. Следовательно, во
втором случае зафиксируется
дополнительный код приращения
а
знаковый разряд остается
в нулевом состоянии. Следовательно, во
втором случае зафиксируется
дополнительный код приращения
![]() Поскольку
выбор положительного направления
произволен, удобнее считать положительный
то направление вращения,
при котором приращения периода выражены
в прямом коде. Используя в
качестве знака инверсное значение
знакового разряда, получаем на выходе
второго
регистра сразу код скорости со знаком
направления вращения.
Поскольку
выбор положительного направления
произволен, удобнее считать положительный
то направление вращения,
при котором приращения периода выражены
в прямом коде. Используя в
качестве знака инверсное значение
знакового разряда, получаем на выходе
второго
регистра сразу код скорости со знаком
направления вращения.
Преимущества
предлагаемого решения могут быть
выявлены только после оценки погрешности,
связанной с отбрасыванием членов высших
порядков малости
в разложении (8.6). Можно считать, что
погрешность определяется значением
первого из отбрасываемых членов ряда.
Эта оценка несколько завышена
и для отрицательного приращения периода,
и для положительного. Тогда относительная
погрешность![]() определения
скорости из-за отбрасывания членов
ряда равна
определения
скорости из-за отбрасывания членов
ряда равна![]() Так
как
Так
как![]() то
уменьшение отношения
то
уменьшение отношения
![]() требует
увеличения
требует
увеличения
![]() что
связано с уменьшением разрядности
счетчиков и увеличением составляющих
погрешности, обусловленной дискретным
представлением информации. Реально
при использовании современных
быстродействующих
элементов достижение измерения углового
положения и частоты
вращения с относительной погрешностью
меньше процента при частоте вращения
до ста оборотов в секунду.
что
связано с уменьшением разрядности
счетчиков и увеличением составляющих
погрешности, обусловленной дискретным
представлением информации. Реально
при использовании современных
быстродействующих
элементов достижение измерения углового
положения и частоты
вращения с относительной погрешностью
меньше процента при частоте вращения
до ста оборотов в секунду.
Относительная
погрешность определения углового
положения имеет две составляющие.
Первая составляющая![]() связана
с дискретностью измерений и определяется
измерением углового положения за время
между двумя соседними
измерениями. Поскольку коды углового
положения формируются с частотой
опорного сигнала, то
связана
с дискретностью измерений и определяется
измерением углового положения за время
между двумя соседними
измерениями. Поскольку коды углового
положения формируются с частотой
опорного сигнала, то
![]()
где![]() —частота
вращения вала;То
—
период опорного сигнала.
—частота
вращения вала;То
—
период опорного сигнала.
Вторая
составляющая погрешности определения
углового положения![]() связана
с ограниченной разрядностью кода
углового положения и равна относительному
весу младшего разряда кода, т. е.
связана
с ограниченной разрядностью кода
углового положения и равна относительному
весу младшего разряда кода, т. е.
![]()
где![]() —коэффициент
пересчета счетчика-делителяС1
частоты
—коэффициент
пересчета счетчика-делителяС1
частоты![]() генератора
импульсов,
причем
генератора
импульсов,
причем
![]() С
учетом выражений (8.7) и (8.8) суммарная
отно-
С
учетом выражений (8.7) и (8.8) суммарная
отно-
сительная
погрешность определения углового
положения
![]() может
быть записана
в виде
может
быть записана
в виде
![]()
Приравнивая
нулю производную![]() найдем
оптимальное значение
найдем
оптимальное значение
периода
опорного сигнал![]() при
которой погрешность
при
которой погрешность![]() минимальна:
минимальна:
![]()
При
постоянной частоте вращения относительная
погрешность определения частоты![]() также
имеет две составляющие.
также
имеет две составляющие.
Первая
составляющая
![]() связана
с отбрасыванием всех членов, кроме
связана
с отбрасыванием всех членов, кроме
первого, в разложении частоты вращения в ряд Тейлора (8.6).
Считаем, что
![]()
для
первой составляющей погрешности
определения скорости вращения![]() можно
записать
можно
записать
![]()
Вторая
составляющая погрешности определения
частоты вращения![]() связана
с ограниченной разрядностью кода
частоты. Реально фиксируется не код
частоты вращения, а пропорциональный
ему код приращения периода
связана
с ограниченной разрядностью кода
частоты. Реально фиксируется не код
частоты вращения, а пропорциональный
ему код приращения периода
![]() Абсолютная
погрешность определения
Абсолютная
погрешность определения
![]() равна
равна
![]() —
периоду сигналовгенератора
импульсов.
—
периоду сигналовгенератора
импульсов.
Относительная
погрешность определения![]() может
быть записана в виде
может
быть записана в виде
![]()
С учетом выражений (8.12) и (8.13) суммарная относительная погрешность определения кода частоты вращения может быть записана в виде
![]()
Приравняв
нулю производную
![]() получаем
оптимальное значение
получаем
оптимальное значение
периода
опорного сигнала![]() при
котором погрешность определения частоты
при
котором погрешность определения частоты
вращения минимальна:
![]()
На основании (8.10) и (8.15) можно записать
![]()
Считаем,
например, что частота вращения вала
равна 100 Гц, а частота генератора
импульсов![]() Гц.
Тогда
Гц.
Тогда
![]() т.е.
частота опорного сигнала
ФВ,
при
которой минимизируется погрешность
определения углового положения,
в 12,6 раза выше частоты опорного сигнала,
прн которой минимизируется погрешность
определения частоты вращения.
т.е.
частота опорного сигнала
ФВ,
при
которой минимизируется погрешность
определения углового положения,
в 12,6 раза выше частоты опорного сигнала,
прн которой минимизируется погрешность
определения частоты вращения.
Недостатком преобразователя (рис. 8.3) является невозможность одновременного обеспечения в широком диапазоне изменения частоты вращения высокой точности измерения как углового положения, так н частоты вращения вала, так как для достижения минимальной погрешности определения углового положения необходима частота опорного сигнала ФВ значительно большая, чем частота опорного сигнала, при которой достигается минимум определения частоты вращения.
С целью устранения этого недостатка в состав преобразователя дополнительно введен ряд элементов, обеспечивающих многократную фиксацию кода углового положения за период выходного напряжения ФВ, Функциональная схема такого варианта преобразователя углового положения и частоты вращения вала приведена на рис. 8.4 [а. с. 1053006 (СССР)]. Преобразователь работает следующим образом.
Первый счетчик С1, так же как в схеме рис. 8.3, выполняет функцию де-ления частоты генератора импульсов ГИ. Формирователь опорных сигналов ФОС вырабатывает из выходных периодических сигналов счетчика С1 прямоугольные опорные напряжения ФВ. Как известно, прямоугольный периодический сигнал раскладывается в ряд Фурье по нечетным гармоникам, следовательно, выходной сигнал ФВ содержит как первую, так и высшие нечетные гармоники. Фильтр ФРп выделяет высшую п-гармоннку выходного сигнала ФВ. Нуль-орган НО1 формирует из выходных синусоидальных сигналов фильтра ФРп прямоугольные импульсы, по фронту которых производится запись в регистр Р1 с выходов счетчика СЗ текущего углового положения. На счетный вход этого счетчика поступают импульсы с выхода умножителя частоты УЧ, имеющие частоту в п раз выше частоты ГИ. Таким образом, фиксация кода углового положения производится л раз за один период выходного напряжения фазовращателя.
Канал определения угловой частоты вращения работает следующим образом. Фильтр ФР1 выделяет первую гармонику выходного сигнала ФВ, а НО2 «формирует из выходных сигналов ФР1 прямоугольные импульсы, по фронту которых устанавливается в нулевое состояние триггер Т, вызывая закрытие ключа Кл и прекращая поступление ГИ на счетный вход С2. Через время, достаточное для завершения переноса в этом счетчике, импульс с первого выхода формирователя задержанных импульсов ФЗИ разрешает перезапись кода ско-рости из счетчика С2 во второй регистр Р2. Импульс со второго выхода ФЗИ, воздействуя на вход предустановки С2, осуществляет запись в этот счетчик

кода, соответствующего промежутку времени, в течение которого он отключался от выхода ГИ. Импульс с третьего выхода ФЗИ устанавливает триггер Т в единичное состояние, и цикл определения кода скорости повторяется.
Недостатком совмещенного преобразователя углового, положения н скорости является невозможность одновременного обеспечения в широком диапазоне изменения частоты вращения высокой точности измерения как углового положения, так и частоты вращения вала. Это связано с тем, что для достижения минимальной погрешности определения углового положения необходима частота опорного сигнала, при которой достигается минимум погрешности определения частоты вращения. Минимальное значение относительной погрешности измерения частоты вращения достигается за счет поддержания оптимального соотношения между измеряемой скоростью и частотой опорного сигнала фазовращателя.
Относительная погрешность определения скорости падает с уменьшением частоты вращения, если одновременно снижается частота опорного напряжения. Однако уменьшение частоты опорного напряжения приводит к увеличению погрешности определения углового положения.
В (а. с. 994990 (СССР)] предложено следующее решение этого противоречия. Частота опорного сигнала ФВ выбирается постоянно исходя из условия минимума погрешности определения углового положения при максимальной частоте вращения; производится преобразование выходной частоты ФВ перед подачей на вход блока измерителя скорости исходя из условий минимума погрешности определения текущего значения частоты вращения. Это достигается тем, что в преобразователь дополнительно включены блок умножения и деле- ния частоты с переменным коэффициентом, блок вычитания частот и блок переключения диапазонов. Однако все это значительно усложняет преобразователь углового положения н скорости.